在本科阶段的教材中,往往会有多元正态分布的公式出现,但课堂上都不会重点讲解,而在研究生入学考试中也基本不会考。但在实际应用中,多元的情况却非常常见。
本文通过对多元正态分布的公式进行拆解,来正式认识一下它。
1 多元正态分布公式
对于\(D\)维正态分布变量\(x\),直接上它的密度公式:
其中\(\mu\)为\(D\times 1\)的均值向量,\(\Sigma\)为\(D\times D\)的协方差矩阵。
公式看起来十分复杂,相信第一次见到时,几乎所有人都会被吓到。沉住气,我们把它拆解了看。
2 公式拆解
先看最后面指数函数中的部分,其中有一个二次型:
\(\Delta\)叫作\(\mu\)和\(x\)之间的Mahalanobis distance,中文叫马哈拉诺比斯距离或者马氏距离,是印度统计学家Mahalanobis提出的。
\(\Sigma\)一般可以是对称矩阵,考虑它的\(D\)个特征值\(\lambda_i\)和相应的相互正交的特征向量\(u_i\),\(\Sigma u_i = \lambda_i u_i\),记\(U=(u_1,\cdots,u_D)\),\(U\)满足\(U'U=I_D\),再记\(\Lambda=\text{diag}(\lambda_1,\cdots,\lambda_D)\),那么可将\(\Sigma\)写成特征向量展开的形式:
如果做换元\(y=U'(x-\mu)\),则有\(\Delta^2=y'\Lambda^{-1}y\),也就是说,通过换元,我们将原来在\(x\)坐标系下的分布,变成了一个在\(y\)坐标系下的、各个分量互相不相关的分布。如图所示:

再看在指数函数前面的部分,由\(\Sigma =U\Lambda U'\)可知\(|\Sigma|=|\Lambda|\),因此\(|\Sigma|^{-1}=|\Lambda|^{-1}=\prod\limits_{j=1}^{D}\lambda_j^{-1}\)。
利用Jacobian matrix \(J=U'\),并由\(|J|^2=|U'U|=1\)可得\(|J|=1\),于是我们可以将原来的密度函数直接变换为
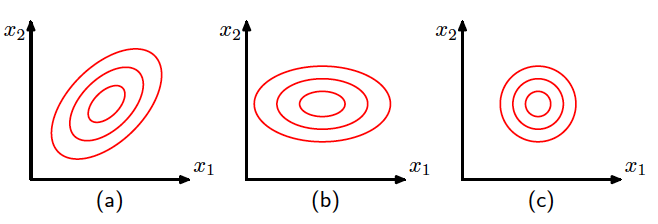
在原来的\(x\)坐标系下,各分量之间可能有相关性,对应二维时候的图像为下图(1),而在新的\(y\)坐标系下,协方差矩阵变为对角矩阵,也因此图像变为下图中(2)的情况,而若各分量同方差,则会变为类似于标准正态分布的同心圆即下图(3)的形式: