PointRCNN:3D Object Proposal Generation and Detection from Point Cloud
PointRCNN是CVPR2019录用的一篇三维目标检测论文。
原始点云的3D目标检测,只用点云作为输入。提出一种新的3D物体检测器,用于从原始点云中检测3D物体。所提出的Stage-1网络以自下而上的方式直接从点云生成3D方案,比以前的方案生成方法具有更高的召回率。Stage-2网络将语义特征和局部空间特征结合起来,在规范坐标中对提案进行了优化。此外,新提出的基于bin的损失证明了它在三维边界框回归中的有效性。
两阶段:
第一阶段:自下而上的3D proposal产生。
Stage-1阶段子网络不是从RGB图像或者将点云投影到鸟类视图或者体素中,而是通过将整个场景的点云分割为前景点和背景点,以自下而上的方式直接从点云生成少量高质量的3D提案。
第二阶段:在规范坐标中修改proposal。获得最终的检测结果。
Stage-2阶段子网络将每个提案的池化的点转换为规范坐标,更好地学习局部空间特征,这个过程与Stage-1中学习每个点的全局语义特征相结合,用于Box优化和置信度预测。
对KITTI数据集的3D检测基准的广泛实验表明,该架构优于带有显著边缘的最先进方法。
和2D数据的比较:
和二维图像的目标检测不同,自动驾驶场景中的三维物体被标注的3D边界框很好地分隔开。也即,用于3D物体检测的数据直接提供用于3D目标分割的语义掩模。这是3D检测和2D检测训练数据之间的差异。在2D目标检测中,边界框只能为语义分割提供弱监督。基于这一观察,作者提出了两阶段的3D目标检测框架—PointRCNN,该框架直接运行在3D点云上,具有高鲁棒性和准确的3D检测性能。
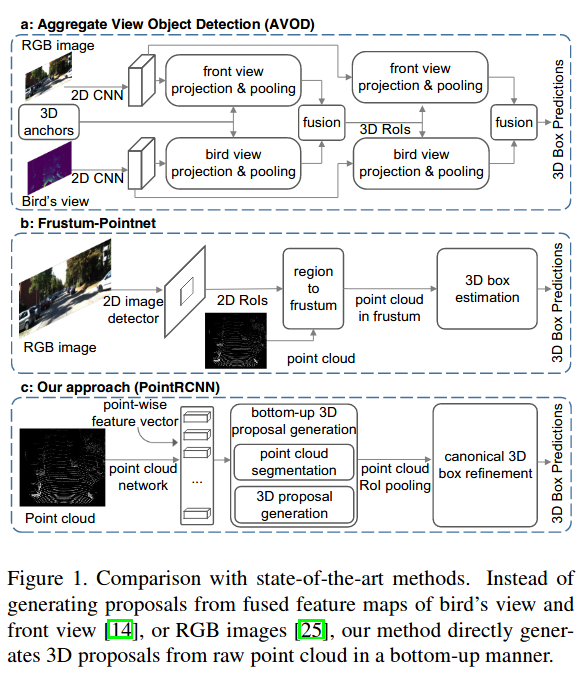

PointRCNN包括两个阶段,第一阶段旨在以自下而上的方案生成3D边界框提案,基于3D边界框生成真实分割掩模,分割前景点并同时从分割点生成少量边界框提案。这样的策略避免了在整个3D空间中使用大量3D锚框。第二阶段进行规范的3D box优化。在生成3D提案之后,采用点云区域池化操作来“pool”来自Stage-1学到的点表示。与直接估计全局box坐标的方法不同,“pooled”3D点被转换为规范坐标并与“pooled”的点特征以及Stage-1的分割掩模组合完成坐标优化。该策略充分利用了Stage-1的分割和提案子网络提供的信息。
还提出基于全区域的3D box回归损失以用于提案生成和优化,收敛更快,有更高的召回率。
一、 通过点云分割自下而上生成3D提案
提出一种的基于全场景点云分割的精确、鲁棒的三维提案生成算法作为第一阶段子网络。 3D场景中的目标是自然分离的,彼此不重叠。所有三维目标的分割掩模都可以通过3D边界框注释直接获得,即3D框内的3D点被视为前景点。因此,我们建议以自下而上的方式生成3D提案。具体来说,我们逐点学习点的特征、分割原始点云,同时从分割的前景点生成3D提案。基于这种自下而上的策略,避免在3D空间中使用大量预定义的3D框,并且显著限制了生成的3D提案的搜索空间。并且,作者的3D box提案方法比基于3D锚点的提案生成方法有更高的召回率。
点云的表示使用带有msg(multi-scale grouping)的pointnet++作为backbone,也可以使用VoxelNet等。
前景点分割:作者的三维提案生成方法直接从前景点生成3D box 提案,同时完成前景分割和三维预测框生成。经backbone处理后的每个点的特征,分别经过前景掩模预测分支和三维提案框回归分支完成相应任务。点分割的真实掩模由3D边界框提供。并且使用focal loss来解决室外场景中,由前景点过少带来的类别不平衡问题。
基于bin的三维边界框生成:边界回归分支使用前景点回归生成三维提案(要注意,背景点也参与了提案的生成)。为了约束三维提案,作者提出了基于bin的回归损失估计目标的三维边界框。预测3D边界框需要预测中心位置、目标方向与目标尺寸。
二、点云区域池化
在获得三维边界框方案后,根据之前生成的框提案来优化框的位置和方向。根据每个3D提案的位置,对每个点及其特征进行池化。稍稍放大后的边界框内的点及其特征将被保留。然后使用分割掩模区分稍微放大框内的前景、背景点。没有内部点的提案将会被消除。
三、规范3D边界框优化
如图2(b)所示,“pooled”点及其相关特征都被送入Stage-2子网络,以优化3D box的位置和前景目标的可信度。经过图4所示的规范坐标转换,更好地学习每个提案的局部空间特征。
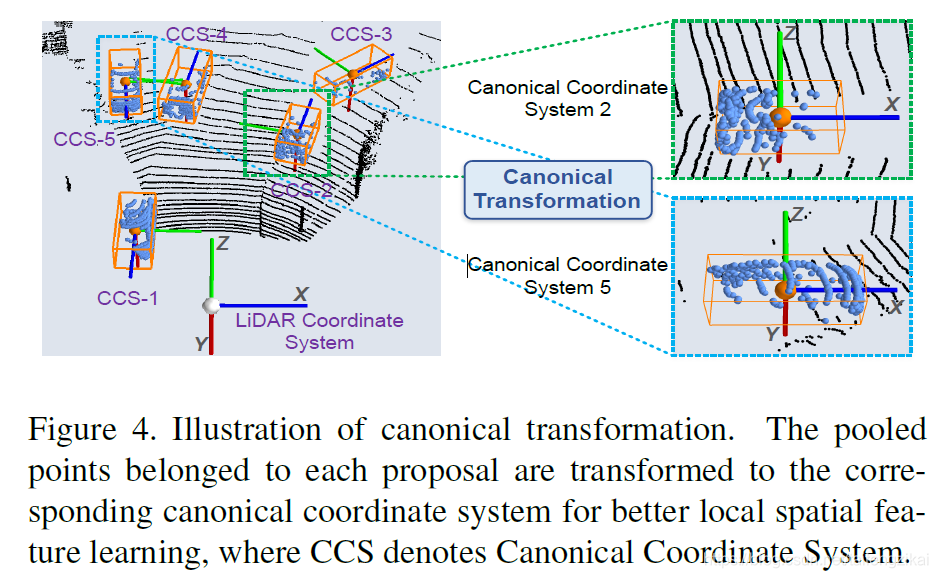
之后,优化子网络将转换后的局部空间点和Stage-1阶段的全局语义特征结合优化框和置信度。在这里,作者在强度和掩模的基础上,增加了深度信息,经全连接层后,“catenate”全局特征送入网络。同样采用类似基于bin回归的损失用于提案优化。Stage-2的loss整体为: