建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
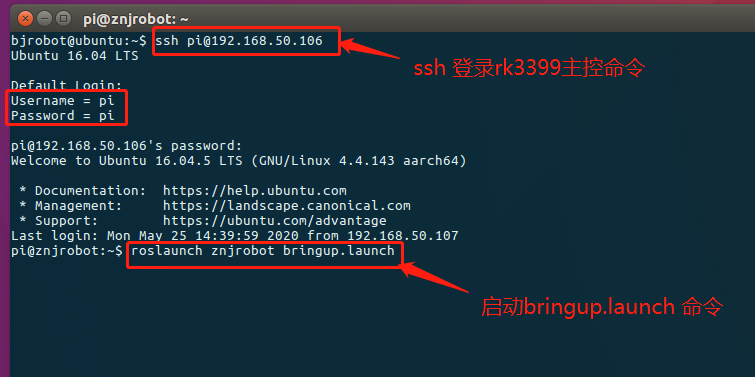
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
2.在虚拟机端打开一个终端,ssh 过去主控端启动roslaunch znjrobot karto_slam.launch。

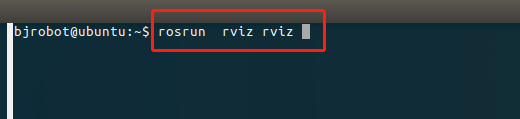
3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
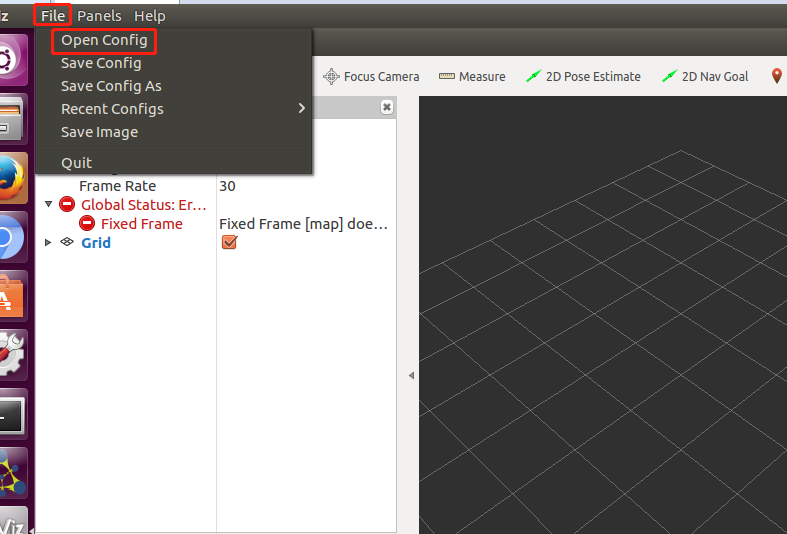
4.全屏化后点击 File,点击 Open Config,
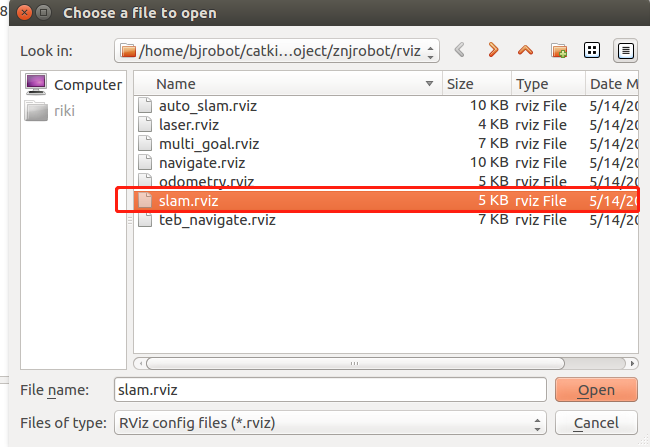
5.到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/slam.rviz,的slam.rviz 文件。点 Open
6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
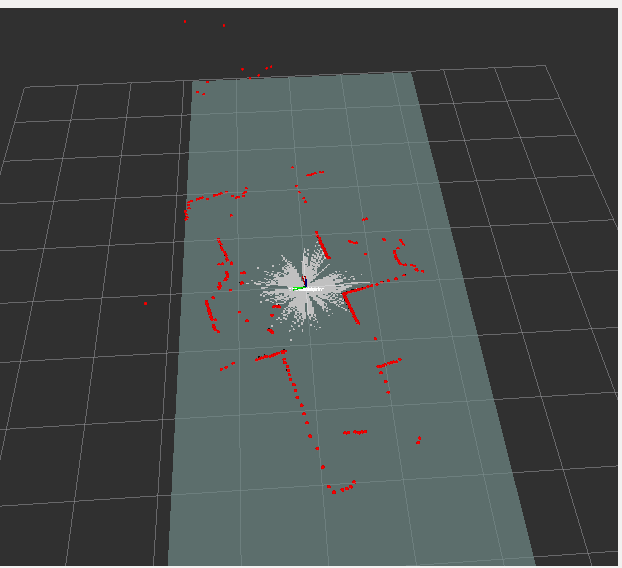
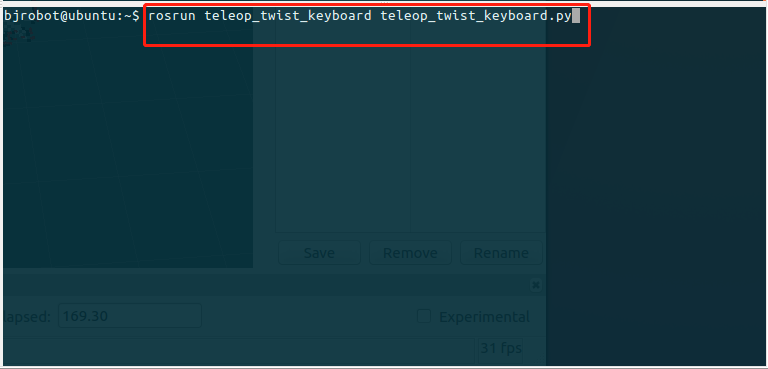
7.在虚拟机端,打开一个终端启动键盘控制,对小车进行移动控制,完成地图构建。
8.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本。
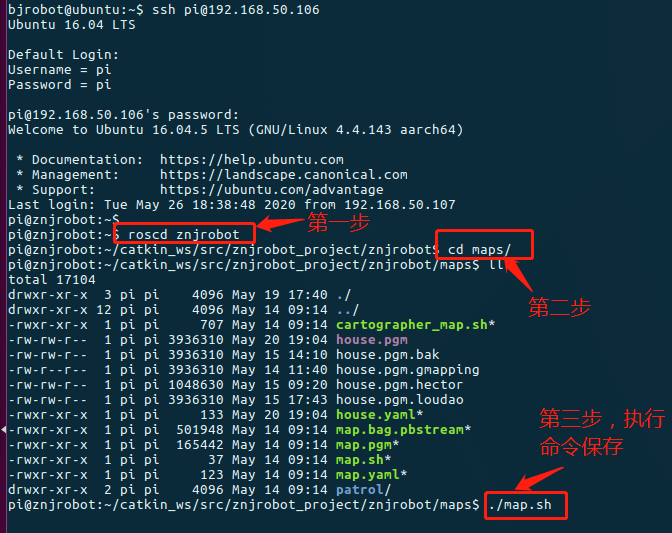
执行完成后,即可查看到在目录下重新生成的house.pgm文件。