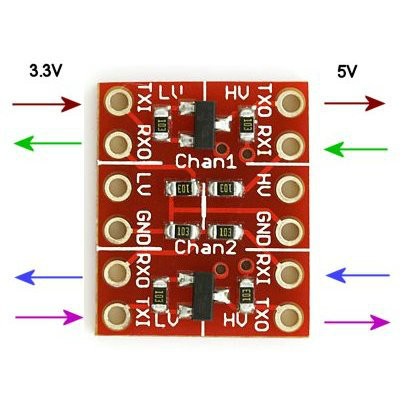
逻辑电平转换
树莓派的逻辑电平为3.3v,Arduino为5v,需要进行逻辑转换,在某宝买了个逻辑转换器:
HV接5V电源
LV接3.3V电源
GND接电源负极,两个电源公地
RXI输入5v TTL,将在RXO输出3.3v TTL
TXI输入输出3.3V TTL ,TXO输入输出5V TTL, TXI与TXO双向互转
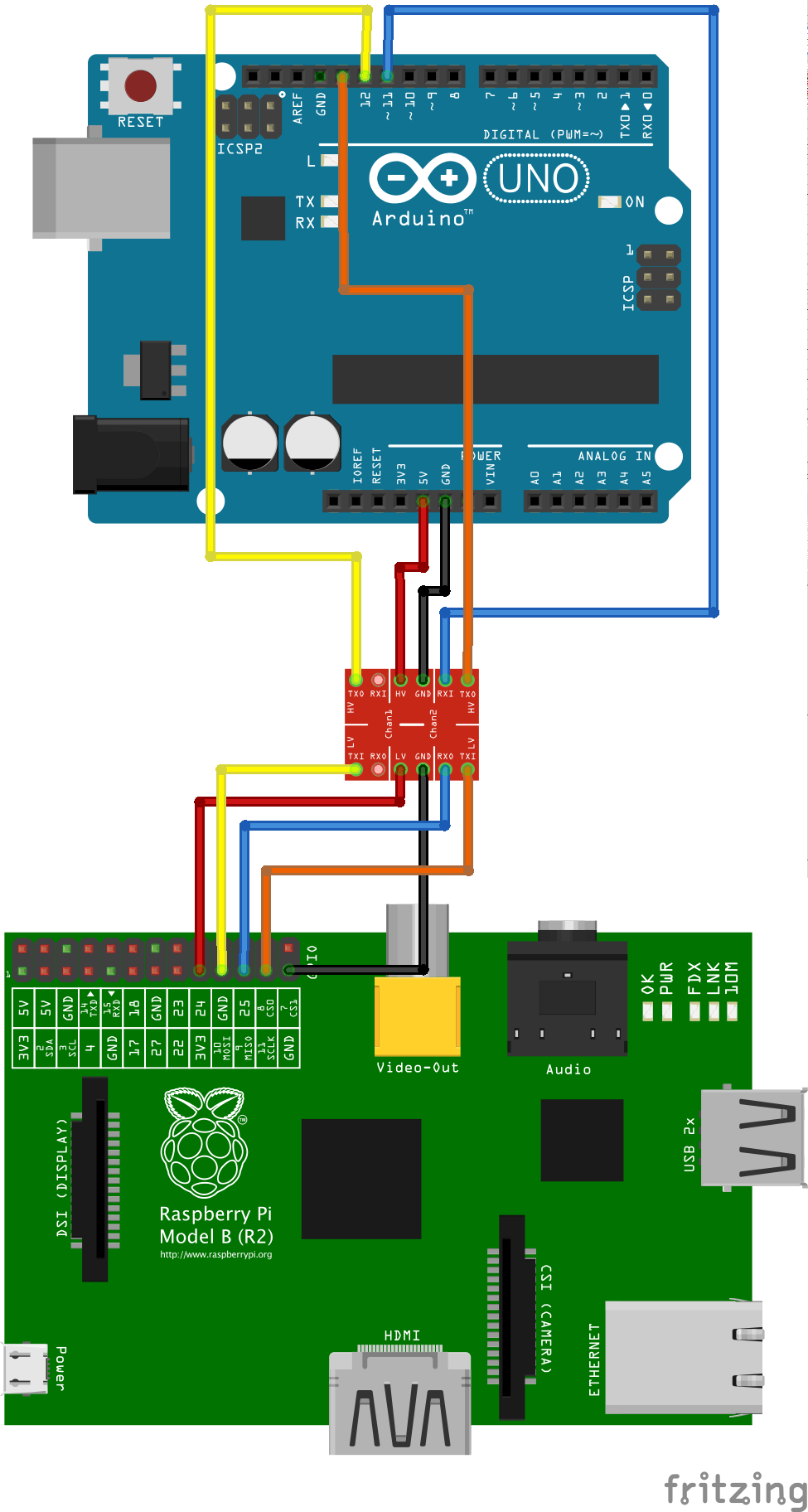
连线方式
树莓派的程序
1 /* 2 * SPI testing utility (using spidev driver) 3 * 4 * Copyright (c) 2007 MontaVista Software, Inc. 5 * Copyright (c) 2007 Anton Vorontsov <avorontsov@ru.mvista.com> 6 * 7 * This program is free software; you can redistribute it and/or modify 8 * it under the terms of the GNU General Public License as published by 9 * the Free Software Foundation; either version 2 of the License. 10 * 11 * Cross-compile with cross-gcc -I/path/to/cross-kernel/include 12 */ 13 14 #include <stdint.h> 15 #include <unistd.h> 16 #include <stdio.h> 17 #include <stdlib.h> 18 #include <getopt.h> 19 #include <fcntl.h> 20 #include <sys/ioctl.h> 21 #include <linux/types.h> 22 #include <linux/spi/spidev.h> 23 24 #define ARRAY_SIZE(a) (sizeof(a) / sizeof((a)[0])) 25 26 static void pabort(const char *s) 27 { 28 perror(s); 29 abort(); 30 } 31 32 static const char *device = "/dev/spidev0.0"; 33 static uint8_t mode; 34 static uint8_t bits = 8; 35 static uint32_t speed = 500000; 36 static uint16_t delay; 37 38 static void transfer(int fd) 39 { 40 int ret; 41 uint8_t tx[] = { 42 0x48, 0x45, 0x4C, 0x4C, 0x4F, 43 0x20, 44 0x57, 0x4F, 0x52, 0x4C, 0x44, 45 0x0A 46 }; 47 uint8_t rx[ARRAY_SIZE(tx)] = {0, }; 48 struct spi_ioc_transfer tr = { 49 .tx_buf = (unsigned long)tx, 50 .rx_buf = (unsigned long)rx, 51 .len = ARRAY_SIZE(tx), 52 .delay_usecs = delay, 53 .speed_hz = speed, 54 .bits_per_word = bits, 55 }; 56 57 ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); 58 if (ret < 1) 59 pabort("can't send spi message"); 60 61 /* 62 for (ret = 0; ret < ARRAY_SIZE(tx); ret++) { 63 if (!(ret % 6)) 64 puts(""); 65 printf("%.2X ", rx[ret]); 66 } 67 puts(""); 68 */ 69 } 70 71 static void print_usage(const char *prog) 72 { 73 printf("Usage: %s [-DsbdlHOLC3] ", prog); 74 puts(" -D --device device to use (default /dev/spidev1.1) " 75 " -s --speed max speed (Hz) " 76 " -d --delay delay (usec) " 77 " -b --bpw bits per word " 78 " -l --loop loopback " 79 " -H --cpha clock phase " 80 " -O --cpol clock polarity " 81 " -L --lsb least significant bit first " 82 " -C --cs-high chip select active high " 83 " -3 --3wire SI/SO signals shared "); 84 exit(1); 85 } 86 87 static void parse_opts(int argc, char *argv[]) 88 { 89 while (1) { 90 static const struct option lopts[] = { 91 { "device", 1, 0, 'D' }, 92 { "speed", 1, 0, 's' }, 93 { "delay", 1, 0, 'd' }, 94 { "bpw", 1, 0, 'b' }, 95 { "loop", 0, 0, 'l' }, 96 { "cpha", 0, 0, 'H' }, 97 { "cpol", 0, 0, 'O' }, 98 { "lsb", 0, 0, 'L' }, 99 { "cs-high", 0, 0, 'C' }, 100 { "3wire", 0, 0, '3' }, 101 { "no-cs", 0, 0, 'N' }, 102 { "ready", 0, 0, 'R' }, 103 { NULL, 0, 0, 0 }, 104 }; 105 int c; 106 107 c = getopt_long(argc, argv, "D:s:d:b:lHOLC3NR", lopts, NULL); 108 109 if (c == -1) 110 break; 111 112 switch (c) { 113 case 'D': 114 device = optarg; 115 break; 116 case 's': 117 speed = atoi(optarg); 118 break; 119 case 'd': 120 delay = atoi(optarg); 121 break; 122 case 'b': 123 bits = atoi(optarg); 124 break; 125 case 'l': 126 mode |= SPI_LOOP; 127 break; 128 case 'H': 129 mode |= SPI_CPHA; 130 break; 131 case 'O': 132 mode |= SPI_CPOL; 133 break; 134 case 'L': 135 mode |= SPI_LSB_FIRST; 136 break; 137 case 'C': 138 mode |= SPI_CS_HIGH; 139 break; 140 case '3': 141 mode |= SPI_3WIRE; 142 break; 143 case 'N': 144 mode |= SPI_NO_CS; 145 break; 146 case 'R': 147 mode |= SPI_READY; 148 break; 149 default: 150 print_usage(argv[0]); 151 break; 152 } 153 } 154 } 155 156 int main(int argc, char *argv[]) 157 { 158 int ret = 0; 159 int fd; 160 161 parse_opts(argc, argv); 162 163 fd = open(device, O_RDWR); 164 if (fd < 0) 165 pabort("can't open device"); 166 167 /* 168 * spi mode 169 */ 170 ret = ioctl(fd, SPI_IOC_WR_MODE, &mode); 171 if (ret == -1) 172 pabort("can't set spi mode"); 173 174 ret = ioctl(fd, SPI_IOC_RD_MODE, &mode); 175 if (ret == -1) 176 pabort("can't get spi mode"); 177 178 /* 179 * bits per word 180 */ 181 ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits); 182 if (ret == -1) 183 pabort("can't set bits per word"); 184 185 ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits); 186 if (ret == -1) 187 pabort("can't get bits per word"); 188 189 /* 190 * max speed hz 191 */ 192 ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed); 193 if (ret == -1) 194 pabort("can't set max speed hz"); 195 196 ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed); 197 if (ret == -1) 198 pabort("can't get max speed hz"); 199 200 printf("spi mode: %d ", mode); 201 printf("bits per word: %d ", bits); 202 printf("max speed: %d Hz (%d KHz) ", speed, speed/1000); 203 204 transfer(fd); 205 206 close(fd); 207 208 return ret; 209 }
Arduino的程序
1 // Written by Nick Gammon 2 // February 2011 3 4 5 #include <SPI.h> 6 7 char buf [100]; 8 volatile byte pos; 9 volatile boolean process_it; 10 11 void setup (void) 12 { 13 Serial.begin (115200); // debugging 14 15 // have to send on master in, *slave out* 16 pinMode(MISO, OUTPUT); 17 18 // turn on SPI in slave mode 19 SPCR |= _BV(SPE); 20 21 // get ready for an interrupt 22 pos = 0; // buffer empty 23 process_it = false; 24 25 // now turn on interrupts 26 SPI.attachInterrupt(); 27 28 } // end of setup 29 30 31 // SPI interrupt routine 32 ISR (SPI_STC_vect) 33 { 34 byte c = SPDR; // grab byte from SPI Data Register 35 36 // add to buffer if room 37 if (pos < sizeof buf) 38 { 39 buf [pos++] = c; 40 41 // example: newline means time to process buffer 42 if (c == ' ') 43 process_it = true; 44 45 } // end of room available 46 } // end of interrupt routine SPI_STC_vect 47 48 // main loop - wait for flag set in interrupt routine 49 void loop (void) 50 { 51 if (process_it) 52 { 53 buf [pos] = 0; 54 Serial.println (buf); 55 pos = 0; 56 process_it = false; 57 } // end of flag set 58 59 } // end of loopang