4412的板子IO都是1.8v的。只有I2C6是用了电平转换到了3.3v。所以我准备使用I2C6来驱动mpu9250
一、首先去掉占用的模块
menuconfig中去掉触摸的驱动
- Device Drivers --->
- Input device support --->
- Touchscreens --->
- FT5X0X based touchscreens(去掉)
然后是去掉RC522的驱动(SPI占用I2C了)
- Device Drivers --->
- SPI support --->
- < > RC522 Module driver support(去掉)
-> Networking support (NET [=y])
-> CAN bus subsystem support (CAN [=y])
-> CAN Device Drivers
-> Platform CAN drivers with Netlink support (CAN_DEV [=y])
< > Microchip MCP251x SPI CAN controllers
二、在mach-itop4412.c中添加设备
static struct i2c_board_info i2c_devs6[] __initdata = { { I2C_BOARD_INFO("mpu9250", MPU9250_ADDRESS), }, };
这里的MPU9250_ADDRESS应该是7位的,如果写0XD0,就是MPU9250_ADDRESS>>1
然后内核编译后,烧录进开发板
cat /sys/bus/i2c/devices下就会有6-0068,这个文件了
写了一个空的I2C模版:


#include <linux/kernel.h> #include <linux/module.h> #include <linux/i2c.h> #include <linux/input.h> #include <linux/delay.h> #include <linux/slab.h> #include <linux/interrupt.h> #include <linux/irq.h> #include <linux/gpio.h> #include <linux/platform_device.h> #include <linux/regulator/consumer.h> #include <mach/gpio.h> #include <plat/gpio-cfg.h> #include <plat/ft5x0x_touch.h> #define I2C6_9250_NAME "mpu9250" #define I2C_SDA6 EXYNOS4_GPC1(3) #define I2C_SCL6 EXYNOS4_GPC1(4) static int i2c_mpu9250_probe(struct i2c_client *client, const struct i2c_device_id *id) { printk("==%s: ", __FUNCTION__); return 0; } static int __devexit i2c_mpu9250_remove(struct i2c_client *client) { i2c_set_clientdata(client, NULL); //设置client为NULL printk("==%s: ", __FUNCTION__); return 0; } static const struct i2c_device_id i2c_mpu9250_id[] = { { I2C6_9250_NAME, 0 }, { } }; static struct i2c_driver i2c_mpu9250_driver = { .probe = i2c_mpu9250_probe, .remove = __devexit_p(i2c_mpu9250_remove), .id_table = i2c_mpu9250_id, .driver = { .name = I2C6_9250_NAME, .owner = THIS_MODULE, }, }; static void i2c_io_init() { int ret; ret = gpio_request(I2C_SCL6, "I2C_SCL6"); if(ret) { printk(KERN_ERR "failed to request TP1_EN for I2C control "); } gpio_direction_output(I2C_SCL6, 1); s3c_gpio_cfgpin(I2C_SCL6, S3C_GPIO_OUTPUT); gpio_free(I2C_SCL6); mdelay(5); ret = gpio_request(I2C_SDA6, "I2C_SDA6"); if(ret) { gpio_free(I2C_SDA6); ret = gpio_request(I2C_SDA6, "I2C_SDA6"); if(ret) { printk("i2c_io_test: Fialed to request I2C_SDA6 "); } } gpio_direction_output(I2C_SDA6, 0); mdelay(200); gpio_direction_output(I2C_SDA6, 1); s3c_gpio_cfgpin(I2C_SDA6, S3C_GPIO_OUTPUT); gpio_free(I2C_SDA6); msleep(300); printk("==%s: ", __FUNCTION__); } static int __init i2c_mpu9250_init(void) { printk("==%s: ", __FUNCTION__); i2c_io_init(); return i2c_add_driver(&i2c_mpu9250_driver); } static void __exit i2c_mpu9250_exit(void) { printk("==%s: ", __FUNCTION__); i2c_del_driver(&i2c_mpu9250_driver); } late_initcall(i2c_mpu9250_init); //延迟加载 module_exit(i2c_mpu9250_exit); MODULE_LICENSE("GPL"); MODULE_DESCRIPTION("mpu9250"); MODULE_AUTHOR("ChenTuo");
三、I2C架构层次分类
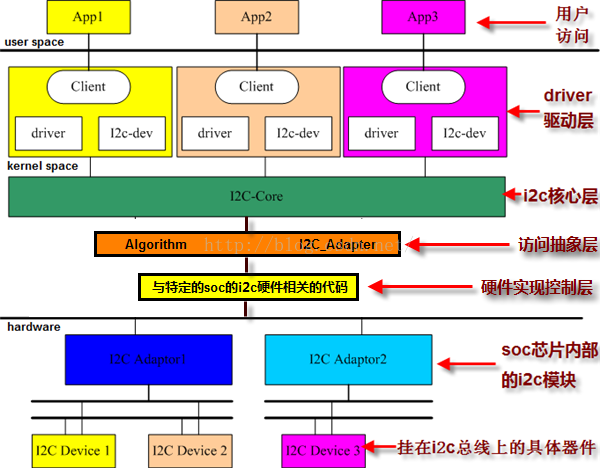
- 第一层:提供i2c adapter的硬件驱动,探测、初始化i2c adapter(如申请i2c的io地址和中断号),驱动soc控制的i2c adapter在硬件上产生信号(start、stop、ack)以及处理i2c中断。覆盖图中的硬件实现层
- 第二层:提供i2c adapter的algorithm,用具体适配器的xxx_xferf()函数来填充i2c_algorithm的master_xfer函数指针,并把赋值后的i2c_algorithm再赋值给i2c_adapter的algo指针。覆盖图中的访问抽象层、i2c核心层
- 第三层:实现i2c设备驱动中的i2c_driver接口,用具体的i2c device设备的attach_adapter()、detach_adapter()方法赋值给i2c_driver的成员函数指针。实现设备device与总线(或者叫adapter)的挂接。覆盖图中的driver驱动层
- 第四层:实现i2c设备所对应的具体device的驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则是千差万别的,所以要实现具体设备device的write()、read()、ioctl()等方法,赋值给file_operations,然后注册字符设备(多数是字符设备)。覆盖图中的driver驱动层。
- --------------------- 本文来自 zqixiao_09 的CSDN 博客 ,全文地址请点击:https://blog.csdn.net/zqixiao_09/article/details/50916916?utm_source=copy
四、Linux下I2C驱动体系结构三部分详细分析
4.1 IIC核心
IIC核心提供了IIC总线驱动和设别驱动的注册、注销方法。在LInux驱动的I2C文件夹下有alogs,busses,chips三个文件夹,另外还有i2c-core.c和i2c-dev.c两个文件。
4.2 IIC总线驱动
IIC总线驱动是对IIC硬件的,适配器可由CPU控制,IIC直接集成在CPU内部。IIC驱动包括IIC适配器数据结构体i2c_adapter、IIC适配器的algorithm数据结构i2c-algorithm和控制器产生通信信号的函数。i2c_algorithm里有iic_xfer就是i2c的低层读写实现。
4.3 IIC设备驱动
IIC设备驱动主要包含了数据结构i2c_driver和i2c_client,我们需要根据具体设备实现其中的成员函数。
i2c-dev.c文件中实现了I2Cdriver,包括实现open,release,read,write以及ioctl等标准文件操作的接口函数。
通过I2Cdriver提供的通用方法可以访问任何一个I2C设备。
五、一些相关的数据结构
i2c_msg:
struct i2c_msg { __u16 addr; /* slave address */ __u16 flags; #define I2C_M_TEN 0x0010 /* this is a ten bit chip address */ #define I2C_M_RD 0x0001 /* read data, from slave to master */ #define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */ #define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */ #define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */ #define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */ #define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */ __u16 len; /* msg length */ __u8 *buf; /* pointer to msg data */ };
I2C_M_TEN:I2C默认就是8位的,如果i2c_msg的flags没有配置I2C_M_TEN的话
I2C_M_RD:标识这是一个读操作
I2C_M_NOSTART:没有起始位
I2C_M_REV_DIR_ADDR:读写标识位反转
I2C_M_IGNORE_NAK:忽略ACK和NACK
I2C_M_NO_RD_ACK:读时忽略ACK