功能概述:
bxCAN是基本扩展CAN(Basic Extended CAN)的缩写,它支持CAN协议2.0A和2.0B;它的设计目标是以最小的CPU负载来高效处理大量的报文。它也支持报文发送的优先级要求(优先级可软件配置)。
CAN2.0B内核:
bxCAN模块可以完全自动地接收和发送CAN报文,且完全支持标准标识符(11位)和扩展标识符(29位)。
主要特征:
支持CAN协议2.0A和2.0B主动模式;
波特率最高可达1兆位/秒;(属于OSI11898标准)
支持时间触发通信功能;(可以通过时间戳来进行数据同步)
发送
3个发送邮箱;(邮箱:包含,数据、地址、ID等)
共有3个发送邮箱供软件来发送报文。发送调度器根据优先级决定哪个邮箱的报文先被发送;
发送报文的优先级特性可软件配置
记录发送SOF时刻的时间戳
接收
3级深度的2个接收FIFO;
共有2个接收FIFO,每个FIFO都可以存放3个完整的报文。它们完全有硬件来管理;
14个位宽可变的过滤器组-由整个CAN共享;(没通过过滤器的报文就直接丢弃掉)
共有14个位宽可变/可配置的标识符过滤器组,软件通过对其设置,从而在引脚收到的报文中选择它的需要的报文,而把其他报文丢弃。
标识符列表;
FIFO溢出处理方式可配置;
记录接收SOF时刻的时间戳;
可支持时间触发通信模式
禁止自动重传模式
16位自由运行定时器;(定时器的作用:提供时间戳)
定时器分辨率可配置
可在最后2个数据字节发送时间戳
管理
中断可屏蔽
邮箱占用单独1块地址空间,便于提高软件效率
相关寄存器:
控制、状态和配置寄存器
应用程序通过这些寄存器,可以:
配置CAN参数,比如速度相关的波特率(所谓波特率就是发送一个位数据所花费的时间)
请求发送报文
处理报文接收
管理中断
获取诊断信息
CAN总线框架:

bxCAN工作模式:
bxCAN有3个主要的工作模式:初始化、正常和睡眠模式;
还包括:测试模式、静默模式、环回模式、环回静默模式
初始化模式:主要是进行配置,配置完就进入正常模式。然后进入睡眠模式(低功耗模式)

报文发送过程:

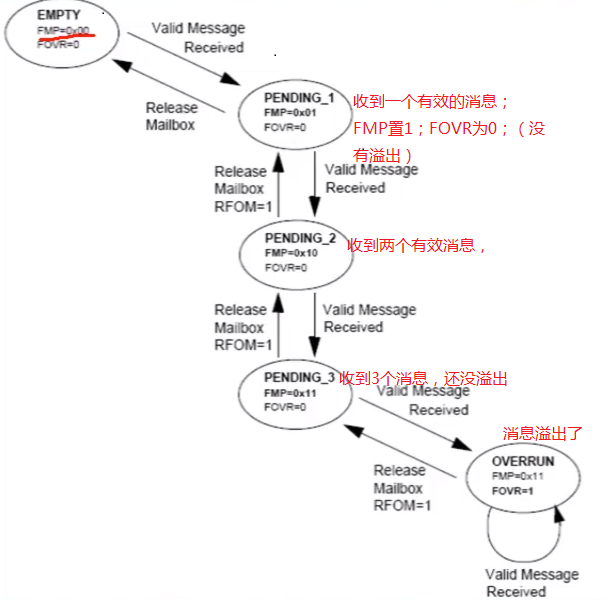
报文接收过程:
接收到的报文,被存储在3级邮箱深度的FIFO中。FIFO完全由硬件来管理,从而节省了CPU的处理负荷,简化了软件并保证了数据的一致性。应用程序只能通过读取FIFO输出邮箱,来读取FIFO中最先收到的报文;
有效报文
根据CAN协议,当报文被正确接收(直到EOF域的最后1位都没有错误),且通过了标识符
过滤,那么该报文被认为是有效报文。请参考14.5.4:标识符过滤。
接收相关的中断
一旦往FIFO存入1个报文,硬件就会更新FMP[1:0]位,并且如果CAN_IER寄存器的FMPIE位
为1,那么就会产生一个中断请求。
当FIFO变满时(即第3个报文被存入),CAN_RFxR寄存器的FULL位就被置1,并且如果
CAN_IER寄存器的FFIE位为1,那么就会产生一个满中断请求。
在溢出的情况下,FOVR位被置1,并且如果CAN_IER寄存器的FOVIE位为1,那么就会产生
一个溢出中断请求。