一.克隆系统到PC机
1.检查是否可以wifi上网:
1).插上无限网卡,连接wifi
2).打开网页,若不能上网,但可ping通同网段其它用户(也可试ping 8.8.8.8)
解决:在/etc/resolv.conf文件添加nameserver 127.0.1.1 (或141.141.141.141或8.8.8.8)
3).若不能搜索到wifi,则考虑无线网卡的驱动安装问题
2.更新:
sudo apt-get update
sudo apt-get upgrade
3.确保用户在串口隶属的组内(一般为dialout组)
1).ls -l /dev/ttyS*
2).groups 用户名
3).sudo gpasswd --add 用户名 dialout
4).确认操作成功:groups 用户名
二.PC设置:
1.设置电脑名同用户名:
1).sudo gedit /etc/hostname
2).将电脑名改为和用户名相同,如:将agv01-desktop改为agv01
2.添加其它用户的IP和用户名
1).sudo gedit /etc/hosts
2).添加其它用户的IP和用户名,如: wang
3.设置开机跳过密码输入

4.关闭屏幕保护后需输入密码解锁

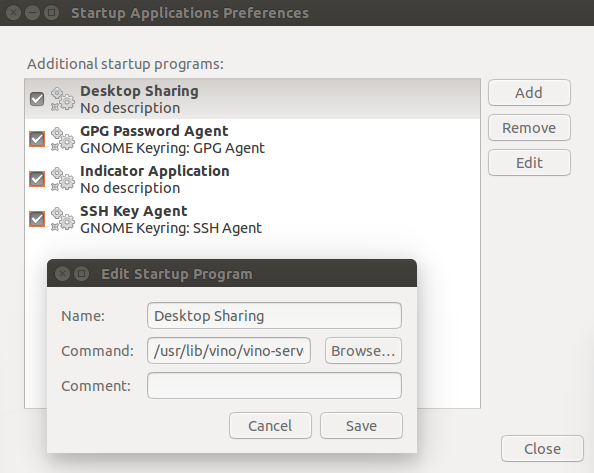
5.设置远程桌面项,使其允许其它用户远程桌面该电脑

6.开机自启动项添加远程桌面服务
三.软件安装
1.安装手柄驱动
sudo apt-get install joystick
2.安装ssh服务器
apt-get install openssh-server
3.安装navigation
apt-get install ros-jade-navigation
4.安装机器人自启动所需软件包
apt-get install ros-jade-robot-upstart
5.安装pose-publisher
apt-get install ros-jade-robot-pose-publisher
四.串口测试
1.测试方法:
硬件: 连接串口的发送和接收引脚
软件: 编写串口发送接收程序,检测是否能接收到发送的数据(也可下载cutecom串口调试工具)
2.测试结果:
正常: 可以正常发收
com口可以打开,但通信失败 原因:串口线差错或断开
com3口打开失败(坏的文件描述符) 原因:com3为485口,在硬件上配死
五.安装Qt
1.到下载的Qt目录下,chmod 777 qt软件名
2../qt软件名,安装路径选择/opt/Qt...
六.移植项目程序
1.固定本机与路由及激光雷达的IP
1).对路由IP:192.168.0.101~150
2).对激光雷达IP:192.168.254.~
2.修改.bashrc文件
1).sudo gedit .bashrc
2).添加:
source /opt/ros/jade/setup.bash
source /home/用户名/项目工作空间名/devel/setup.bash
3).source .bashrc
3.修改参数服务器参数
1).launch文件
2).参数配置文件
4.拷贝程序并编译
1).cd 工作空间catkin_make
2).添加权限chmod 777 /home...
3).catkin_make
七.外设测试
1.测试手柄及轮子
1).启动手柄及电机节点后,按下手柄按键,确认前后左右运动是否正确
2.测试编码器
1).让机器人前后运动,确认编码器方向正确,左右运动确认左右对应正确
八.开机自启动机器人服务的设置
1).串口权限设置:sudo echo KERNEL=="ttyS[0-9]*", SUBSYSTEM=="tty", GROUP=="dialout", MODE="0666" >> /etc/udev/rules.d/50-chmod-tty.rules
2).安装ros软件包:apt-get install ros_indigo_robot_upstart(前面已安装)
3).安装:rosrun robot_upstart install bzrobot_bringup/launch/base.launch
4).重启电脑
5).可能用到的命令:
a). sudo service bzrobot start
b). sudo service bzrobot stop
c.) sudo nano /var/log/upstart/bzrobot.log
d). sudo rm -f /var/log/upstart/bzrobot.log
e). rosrun robot_upstart uninstall bzrobot
备注:插无限网卡上网问题
i3正常
两台i5插上可以连上无限网,而且ping网关192.168.0.2可以通,ping同网段的其它电脑也通,ping8.8.8.8通
后来添加/etc/resolv.conf文件(设置DNS)问题解决,内容为:nameserver 127.0.1.1,或者nameserver 144.144.144.144
然而,i3那台resolv.conf文件是存在的,但没有nameserver,插上无线网卡后自动有了nameserver 127.0.1.1