2020-2021-1 20209311《Linux内核原理与分析》第三周作业
一、实验二 完成一个简单的时间片轮转多道程序内核代码
1.实验内容
完成一个简单的时间片轮转多道程序内核代码。
2.实验过程
使用实验楼的虚拟机打开shell,依次输入如下命令:
rm -rf mykernel
patch -p1 < ../mykernel_for_linux3.9.4sc.patch
make allnoconfig
make
qemu -kernel arch/x86/boot/bzImage
结果如图所示:
查看 mymain.c 和 myinterrupt.c ,结果如图:


替换 mymain.c 和 myinterrupt.c ,并加入mypcb.h。
mypcb.h
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*2
struct Thread {
unsigned long ip;
unsigned long sp;
};
typedef struct PCB{
int pid;
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
unsigned long stack[KERNEL_STACK_SIZE];
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry;
struct PCB *next;
}tPCB;
mymain.c
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
void my_timer_handler(void)
{
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<
");
my_need_sched = 1;
}
time_count ++ ;
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<
");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<
",prev->pid,next->pid);
/* switch to next process */
asm volatile(
"pushl %%ebp
" /* save rbp of prev */
"movl %%esp,%0
" /* save rsp of prev */
"movl %2,%%esp
" /* restore rsp of next */
"movl $1f,%1
" /* save rip of prev */
"pushl %3
"
"ret
" /* restore rip of next */
"1: " /* next process start here */
"popl %%ebp
"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
myinterrupt.c
tPCB task[MAX_TASK_NUM];
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void);
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].thread.sp = (unsigned long)(&task[i].stack[KERNEL_STACK_SIZE-1]);
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp
" /* set task[pid].thread.sp to rsp */
"pushl %1
" /* push rbp */
"pushl %0
" /* push task[pid].thread.ip */
"ret
" /* pop task[pid].thread.ip to rip */
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
int i = 0;
void my_process(void)
{
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -
",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +
",my_current_task->pid);
}
}
}
mypcb.h中定义的结构体PCB是进程管理块,其中,pid代表进程的标识符;state代表进程状态,初始值是-1,如果被调度运行起来,其值就会变成0;stack代表进程的用户栈;thread代表正在执行的线程信息,sp、ip分别代表当前栈顶和执行位置,task_entry代表进程的入口,next指向下一个PCB。mymain.c初始化了四个进程,并将其连接起来作为调度程序序列;my_start_kernel函数的作用是初始化进程0,使pcb的指针指向进程0,随后初始化其余的进程并开始运行0号进程;my_process函数用来循环并输出语句以及切换进程。myinterrupt.c对时间中断函数进行了修改,并添加了每次时间中断发生时采取的动作,即my_schedule函数,用于mymain.c中进程的切换。
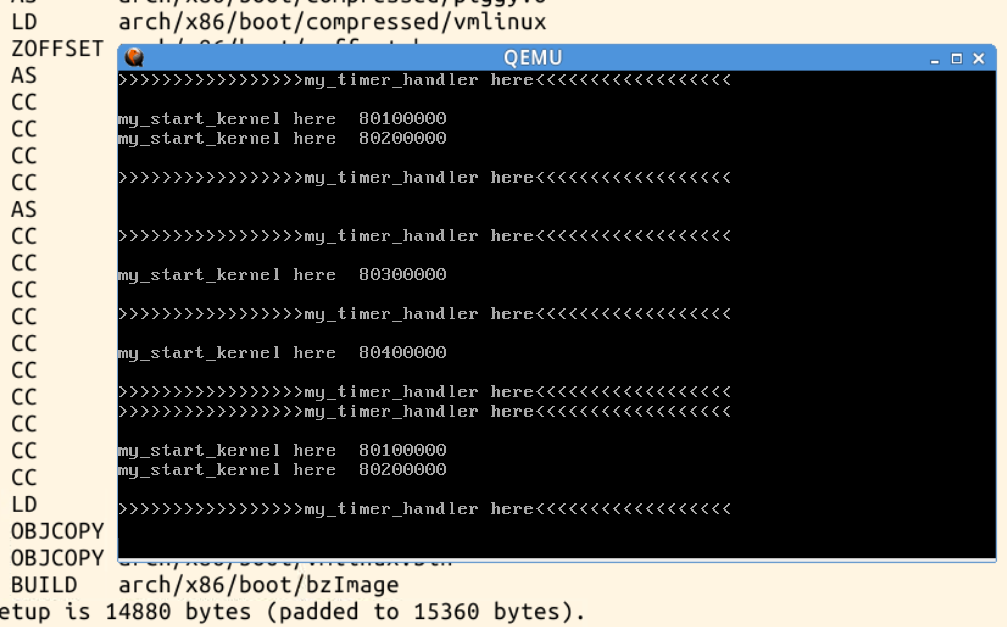
代码修改后的运行结果如下:

二、Linux知识学习
堆栈是计算机三大法宝之一,是C语言程序运行时必须使用的记录函数调用路径和参数存储空间。
1.堆栈相关的寄存器
- ESP:堆栈指针。
- EBP:基址指针,C语言中用来记录当前函数调用基址。
2.堆栈操作
- push:栈顶地址减少4个字节(32位),并将操作数放入栈顶存储单元。
- pop:栈顶地址增加4个字节(32位),并将栈顶存储单元的内容放入操作数。
3.其他关键寄存器
CS:EIP总是指向下一条的指令地址,这里用到了CS寄存器,也就是代码段寄存器和EIP总是指向下一条的指令地址。
- 顺序执行:总是指向地址连续的下一条指令。
- 跳转/分支:执行这样的指令时,CS:EIP的值会根据程序需要被修改。
- call:将当前ES:EIP的值压入栈顶,CS:EIP指向被调用函数的入口地址。
- ret:从栈顶弹出原来保存在这里的CS:EIP的值,放入CS:EIP中。
4.用堆栈来传递函数的参数
对32位的x86CPU来讲,通过堆栈来传递参数的方法时从右到左依次压栈,64位机器稍有不同。
5.函数传递返回值
EAX寄存器可以用来保存返回值;如果有多个返回值,EAX则会返回一个内存地址,这个内存地址可以指向很多的返回值。函数还可以使用参数传递返回值。
6.提供局部变量的空间
函数体内的局部变量是通过堆栈来存储的。
7.编译器使用堆栈的规则
不同版本的编译器对堆栈的使用规则不同;机器的处理器指令集不同时,汇编出的汇编代码也有所不同。