step1: build image
step2: build kernel
bash -x install_image.sh
Image to generate: kata-containers-ubuntu-latest-osbuilder
install -D -m 644 kata-agent.service /lib/systemd/system/kata-agent.service || exit 1; install -D -m 644 kata-containers.target /lib/systemd/system/kata-containers.target || exit 1;
function get_version(){ dependency="$1" runtime_repo_dir="$GOPATH/src/${runtime_repo}" versions_file="${runtime_repo_dir}/versions.yaml" mkdir -p "$(dirname ${runtime_repo_dir})" [ -d "${runtime_repo_dir}" ] || git clone --quiet https://${runtime_repo}.git "${runtime_repo_dir}" get_dep_from_yaml_db "${versions_file}" "${dependency}" }

Step 11/13 : RUN curl --proto '=https' --tlsv1.2 https://sh.rustup.rs -sSLf --output /tmp/rust-init; chmod a+x /tmp/rust-init; export http_proxy=; export https_proxy=; /tmp/rust-init -y ---> Running in 6b50edc95507 info: downloading installer info: profile set to 'default' info: default host triple is aarch64-unknown-linux-gnu info: syncing channel updates for 'stable-aarch64-unknown-linux-gnu' error: could not download file from 'https://static.rust-lang.org/dist/channel-rust-stable.toml.sha256' to '/root/.rustup/tmp/l2202u5hifox_xb6_file' error: caused by: failed to make network request error: caused by: error sending request for url (https://static.rust-lang.org/dist/channel-rust-stable.toml.sha256): error trying to connect: dns error: failed to lookup address information: Temporary failure in name resolution error: caused by: error trying to connect: dns error: failed to lookup address information: Temporary failure in name resolution error: caused by: dns error: failed to lookup address information: Temporary failure in name resolution error: caused by: failed to lookup address information: Temporary failure in name resolution The command '/bin/sh -c curl --proto '=https' --tlsv1.2 https://sh.rustup.rs -sSLf --output /tmp/rust-init; chmod a+x /tmp/rust-init; export http_proxy=; export https_proxy=; /tmp/rust-init -y' returned a non-zero code: 1 Failed at 125: sudo -E AGENT_INIT="${AGENT_INIT}" AGENT_VERSION="${agent_commit}" GOPATH="$GOPATH" USE_DOCKER=true OS_VERSION=${os_version} ./rootfs-builder/rootfs.sh "${distro}"
root@ubuntu:/usr/share/kata-containers# ls /tmp/rust-init ls: cannot access '/tmp/rust-init': No such file or directory root@ubuntu:/usr/share/kata-containers# curl --proto '=https' --tlsv1.2 https://sh.rustup.rs -sSLf --output /tmp/rust-init root@ubuntu:/usr/share/kata-containers# ls /tmp/rust-init /tmp/rust-init root@ubuntu:/usr/share/kata-containers#
Step 1/3 : From docker.io/fedora:latest latest: Pulling from library/fedora a0753a4d6933: Pulling fs layer error pulling image configuration: Get https://production.cloudflare.docker.com/registry-v2/docker/registry/v2/blobs/sha256/6d/6dabf3409d6521e8e195b24bc4a470a0caf007d1f533c4f5f2b807bc821c809c/data?verify=1603076878-lRAgC3gIr4qi57D728vTvh7lbwI%3D: dial tcp 104.18.122.25:443: i/o timeout Failed at 137: sudo -E AGENT_INIT="${AGENT_INIT}" USE_DOCKER=true ./image-builder/image_builder.sh "$ROOTFS_DIR"
多试几次
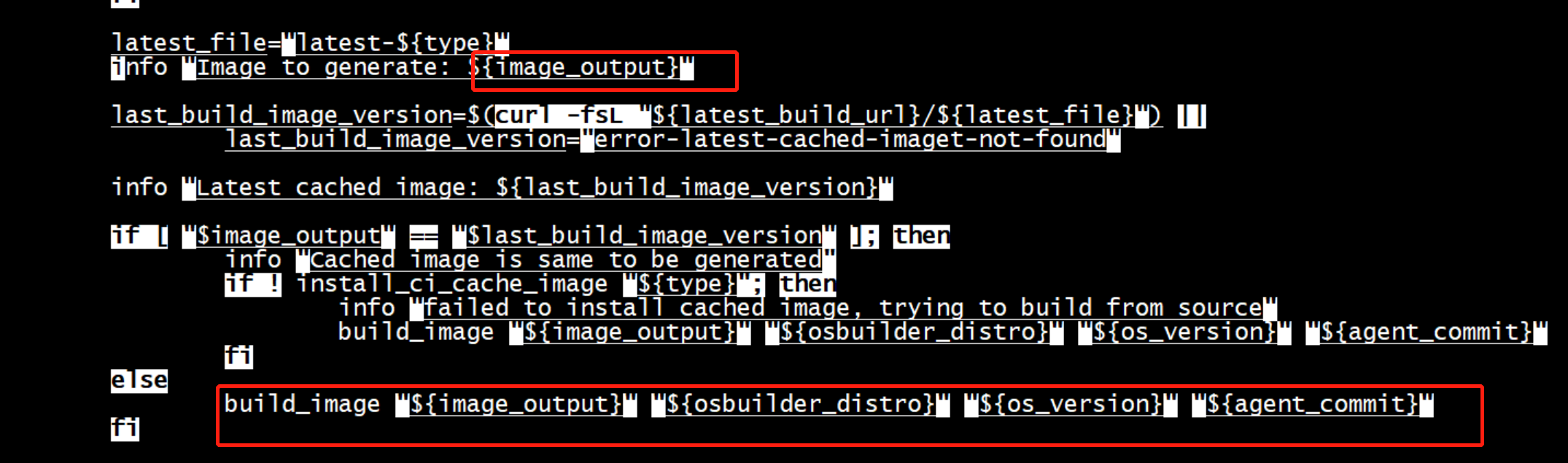
Image to generate: kata-containers-ubuntu-latest-osbuilder
root@ubuntu:/usr/share/kata-containers# du -sh * 171M aarch64-linux-musl-native 61M aarch64-linux-musl-native.tgz 4.0K bak 255M binary 86M binary.tar.gz 88M bionoic.kata.tgz 252M chen 38M coredns.tar 349M etcd.tar 4.0K kata-containers.img 176M kata-containers-ubuntu-latest-osbuilder-88dbc2c-agent-fc6fcf2.img 162M kube-apiserver.tar 152M kube-controller-manager.tar 114M kube-proxy.tar 92M kube-scheduler.tar 4.0K osbuilder-image.yaml 484K pause.tar 0 vmlinuz.container
kernnel
apt-get install flex bison
INFO: current kernel : 5.4.60-89 INFO: cached kernel : none INFO: Install kernel from sources INFO: Config version: 89 INFO: Kernel version: 5.4.60 INFO: kernel path does not exist, will download kernel INFO: Download kernel checksum file: sha256sums.asc % Total % Received % Xferd Average Speed Time Time Time Current Dload Upload Total Spent Left Speed 100 80647 100 80647 0 0 79143 0 0:00:01 0:00:01 --:--:-- 79221 INFO: Download kernel version 5.4.60 INFO: Download kernel % Total % Received % Xferd Average Speed Time Time Time Current Dload Upload Total Spent Left Speed 100 162 100 162 0 0 512 0 --:--:-- --:--:-- --:--:-- 512 100 104M 100 104M 0 0 9227k 0 0:00:11 0:00:11 --:--:-- 10.8M linux-5.4.60.tar.xz: OK
cannot access '/opt/gopath/src/github.com/kata-containers/packaging/kernel/configs/fragments/arm64/../common/experimental/*.conf': No such file or directory INFO: Constructing config from fragments: /opt/gopath/src/github.com/kata-containers/packaging/kernel/configs/fragments/arm64/.config /bin/sh: 1: flex: not found make[1]: *** [scripts/kconfig/lexer.lex.c] Error 127 make: *** [allnoconfig] Error 2 ERROR: failed to find default config /opt/gopath/src/github.com/kata-containers/packaging/kernel/configs/fragments/arm64/.config Failed at 80: "${kernel_repo_dir}/kernel/build-kernel.sh" -v "${kernel_version}" "setup"
apt-get install flex bison
可以在kernel install脚本中设置experimental_kernel

build-kernel.sh

get_kernel_frag_path() { local arch_path="$1" local common_path="${arch_path}/../common" local gpu_path="${arch_path}/../gpu" local kernel_path="$2" local arch="$3" local cmdpath="${kernel_path}/scripts/kconfig/merge_config.sh" local config_path="${arch_path}/.config" local arch_configs="$(ls ${arch_path}/*.conf)" # Exclude configs if they have !$arch tag in the header local common_configs="$(grep "!${arch}" ${common_path}/*.conf -L)" local experimental_configs="$(ls ${common_path}/experimental/*.conf)"


++ local versions_file=/opt/gopath/src/github.com/kata-containers/runtime/versions.yaml ++ local dependency=assets.image.architecture.aarch64.version ++ '[' '!' -f /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml ']' ++ /opt/gopath/src/github.com/kata-containers/tests/.ci/install_yq.sh +++ /opt/gopath/bin/yq r -X /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml assets.image.architecture.aarch64.version ++ result=latest ++ '[' latest = null ']' ++ echo latest + local os_version=latest ++ get_version assets.image.architecture.aarch64.name ++ dependency=assets.image.architecture.aarch64.name ++ runtime_repo_dir=/opt/gopath/src/github.com/kata-containers/runtime ++ versions_file=/opt/gopath/src/github.com/kata-containers/runtime/versions.yaml +++ dirname /opt/gopath/src/github.com/kata-containers/runtime ++ mkdir -p /opt/gopath/src/github.com/kata-containers ++ '[' -d /opt/gopath/src/github.com/kata-containers/runtime ']' ++ get_dep_from_yaml_db /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml assets.image.architecture.aarch64.name ++ local versions_file=/opt/gopath/src/github.com/kata-containers/runtime/versions.yaml ++ local dependency=assets.image.architecture.aarch64.name ++ '[' '!' -f /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml ']' ++ /opt/gopath/src/github.com/kata-containers/tests/.ci/install_yq.sh +++ /opt/gopath/bin/yq r -X /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml assets.image.architecture.aarch64.name ++ result=ubuntu ++ '[' ubuntu = null ']' ++ echo ubuntu + local osbuilder_distro=ubuntu + '[' ubuntu == clearlinux ']' ++ git --work-tree=/opt/gopath/src/github.com/kata-containers/agent --git-dir=/opt/gopath/src/github.com/kata-containers/agent/.git log --format=%h -1 HEAD + local agent_commit=fc6fcf2 ++ git --work-tree=/opt/gopath/src/github.com/kata-containers/osbuilder --git-dir=/opt/gopath/src/github.com/kata-containers/osbuilder/.git log --format=%h -1 HEAD + local osbuilder_commit=88dbc2c + image_output=kata-containers-ubuntu-latest-osbuilder-88dbc2c-agent-fc6fcf2 + '[' no == no ']' + image_output=kata-containers-ubuntu-latest-osbuilder-88dbc2c-agent-fc6fcf2.img + type=image + echo kata-containers-ubuntu-latest-osbuilder-88dbc2c-agent-fc6fcf2.img kata-containers-ubuntu-latest-osbuilder-88dbc2c-agent-fc6fcf2.img + echo ubuntu ubuntu + echo latest latest + echo fc6fcf2 fc6fcf2
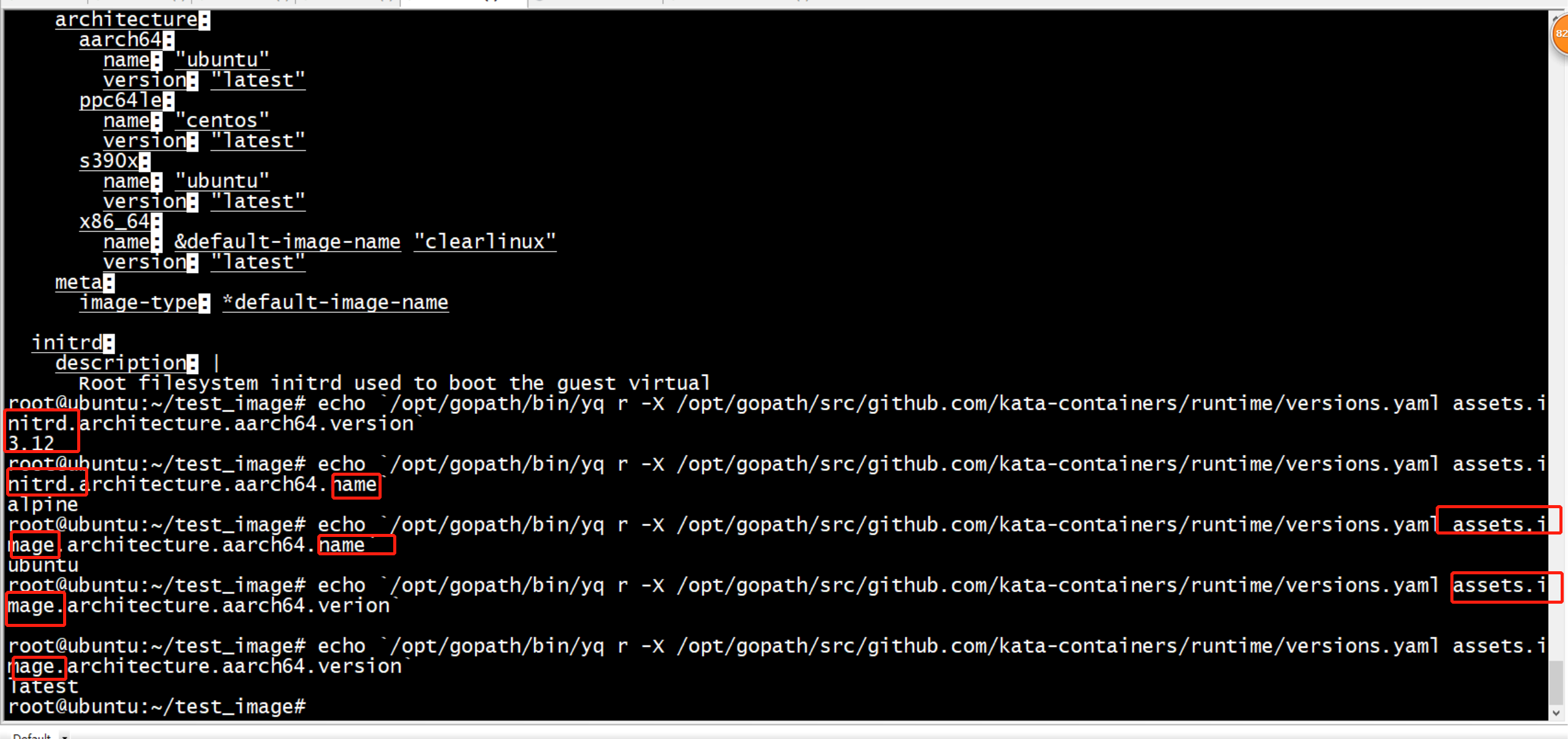
root@ubuntu:~/test_image# echo `/opt/gopath/bin/yq r -X /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml assets.image.architecture.aarch64.name` ubuntu root@ubuntu:~/test_image# echo `/opt/gopath/bin/yq r -X /opt/gopath/src/github.com/kata-containers/runtime/versions.yaml assets.initrd.architecture.aarch64.name` alpine root@ubuntu:~/test_image#

build_image "${image_output}" "${osbuilder_distro}" "${os_version}" "${agent_commit}"
Enable TSN in Kata Containers
Background¶
Time Sensitive Networking (TSN) is a set of standards developed by the IEEE 802.1 Working Group (WG) with the aim of guaranteeing determinism in delivering time-sensitive traffic with low and bounded latency, while allowing non-time-sensitive traffic to be carried through the same network.
As a cloud infrastructure software stack for the edge, TSN is a very important feature for StarlingX as the deterministic low latency is required by edge applications in industrial IOT, video delivery and other ultra-low latency use cases. Furthermore, because StarlingX is a cloud-native platform, TSN support in containers naturally becomes a requirement for StarlingX.
A challenge is that some TSN features are only available on Linux kernel version 4.19 or higher. StarlingX is built on top of CentOS. The StarlingX 3.0 release (currently available) is based on CentOS 7, which provides a Linux 3.10 kernel with some backported patches. (The StarlingX team plans to upgrade to CentOS 8 in a future release.)
Generic containers share the same kernel as the host. However, a Kata Container has its own kernel, which does not depend on the kernel of the host. Fortunately, StarlingX already supports Kata Containers on the master branch, and it will become an officially supported feature in the StarlingX 4.0 release. Therefore, TSN support in containers on StarlingX begins with Kata Containers.
Kata Containers is an open source project to build a secure container runtime with lightweight virtual machines that feel and perform like containers, but provide stronger workload isolation using hardware virtualization technology as a second layer of defense.
Build a Linux kernel with TSN support for Kata Containers¶
As of writing this article, the latest Kata release is Kata 1.11.0. This release includes a Linux 5.4.32 kernel image with Kata patches. Though the kernel version is high enough, TSN features are not fully enabled in the kernel build, so you must build a customized kernel image. The following steps describe how to build a customized kernel image for Kata.
-
Get the
packagingrepository of Kata Containers:git clone https://github.com/kata-containers/packaging.git -
Prepare the build environment by executing this command in the directory
packaging/kernel:./build-kernel.sh -v 5.4.32 -f -d setup -
Prepare a kernel configuration file,
stx.conf, with TSN-related options enabled as shown below. Put it in the directory~/go/src/github.com/kata-containers/packaging/kernel/configs/fragments/x86_64:# qdisc for tsn CONFIG_NET_SCH_TAPRIO=y CONFIG_NET_SCH_ETF=y # I210 adapter driver CONFIG_IGB=y # ptp CONFIG_NET_PTP_CLASSIFY=y CONFIG_NETWORK_PHY_TIMESTAMPING=y CONFIG_PTP_1588_CLOCK=y # vlan CONFIG_VLAN_8021Q=y -
Re-run the setup command to update
stx.confto the desired configuration:./build-kernel.sh -v 5.4.32 -f -d setup -
Build the kernel image:
./build-kernel.sh -v 5.4.32 -f -d build -
Install the built kernel images to the destination directory:
sudo ./build-kernel.sh -v 5.4.32 -f -d install
When these commands are done, two built kernel images, vmlinux.container and vmlinuz.container, will be available in the directory /usr/share/kata-containers. Save the two files for later use.
Build a container image with TSN stack¶
Certain packages are required to build the TSN stack. For example, LinuxPTP is an implementation of the Precision Time Protocol (PTP) according to IEEE standard 1588 for Linux.
The example below shows the dockerfile used to build the container image. Ubuntu 20.04 was chosen as the base image for packages with newer versions. python3-dateutil, python3-numpy, and python3-matplotlib were installed for performance testing. The built container image was named kata_tsn_image.
From ubuntu:20.04
RUN apt-get update
RUN apt-get install -y iproute2 net-tools pciutils ethtool
linuxptp vlan libjansson4 python3-dateutil python3-numpy
python3-matplotlib
Set up an experimental TSN network¶
The experimental TSN network shown in Figure 1 was used to verify the TSN functionality in Kata Containers. The network was composed of a switch with TSN capability and four hosts.
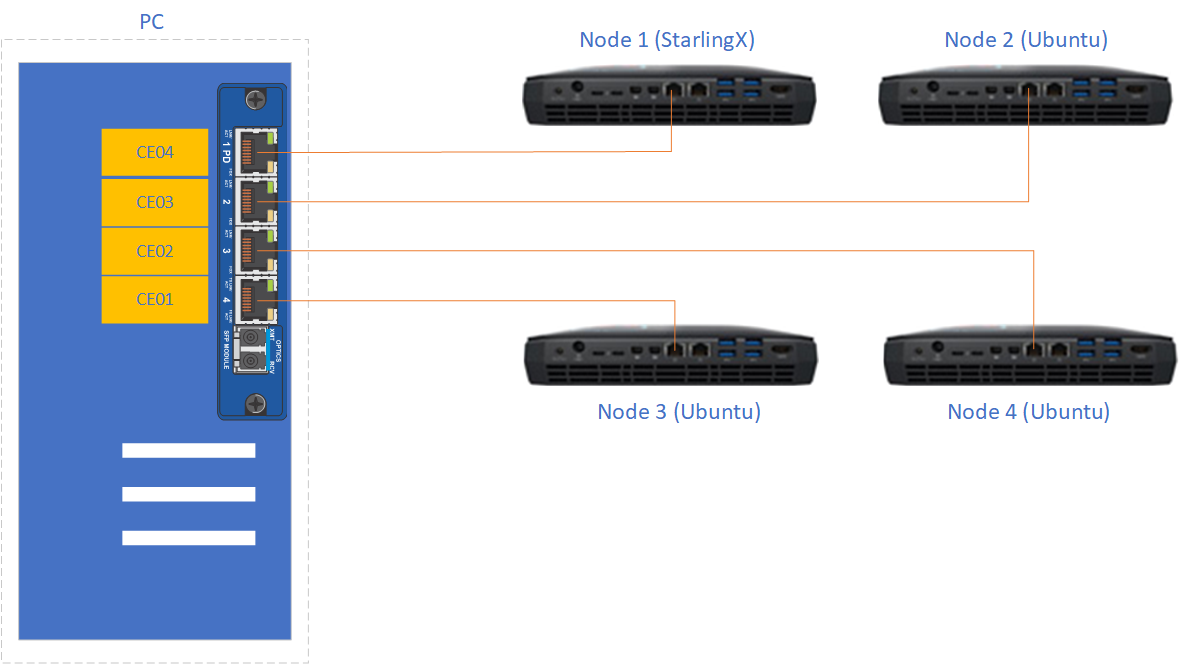
Figure 1: Experimental TSN network¶
-
The TSN switch used a generic PC with a TSN switch card PCIe-0400-TSN inserted. Please refer to the PCIe-0400-TSN User Guide for detailed configuration options.
-
Check the Kontron documentation about the kernel drivers that are provided. The TSN switch has to run the recommended OS (the OS for which there are Kontron drivers). The TSN switch must run a RT kernel too. The Kontron card has drivers for kernel 4.9.11 as of
kontron-tsn-starter-kit-r6driver package. -
After installing the required OS that matches the version of the drivers for the Kontron card you must install the packages recommended in the Kontron manual. After properly installing the drivers for the Kontron card there should be 7 new Ethernet interfaces. These network interfaces have to be configured to use
networkand notNetworkManager. Use the configuration files listed below. Besides the 7 interfaces belonging to the Kontron card, the main network interface should also be configured (listed here aseth0).sudo systemctl stop NetworkManager sudo systemctl disable NetworkManager sudo systemctl enable network # Add the following network scripts # /etc/sysconfig/network-scripts/ifcfg-deipce0 DEVICE=deipce0 TYPE=bridge ONBOOT=yes BOOTPROTO=none ZONE=trusted IPV6INT="no" NM_CONTROLLED="no" # /etc/sysconfig/network-scripts/ifcfg-eth0 DEVICE=eth0 TYPE=Ethernet ONBOOT=yes BOOTPROTO=none ZONE=trusted IPV6INT="no" NM_CONTROLLED="no" # /etc/sysconfig/network-scripts/ifcfg-SE01 DEVICE=SE01 TYPE=Ethernet ONBOOT=yes BOOTPROTO=none ZONE=trusted IPV6INT="no" NM_CONTROLLED="no"# /etc/sysconfig/network-scripts/ifcfg-CE01 # /etc/sysconfig/network-scripts/ifcfg-CE02 # /etc/sysconfig/network-scripts/ifcfg-CE03 # /etc/sysconfig/network-scripts/ifcfg-CE04 # /etc/sysconfig/network-scripts/ifcfg-IE01 # take CE01 as an example, other ports are similar # you need to add 4 more configs for ifcfg-CE02, ifcfg-CE03, ifcfg-CE04 and ifcfg-IE01 DEVICE=CE01 TYPE=Ethernet BRIDGE=deipce0 ONBOOT=yes BOOTPROTO=none ZONE=trusted IPV6INT="no" NM_CONTROLLED="no" -
The hosts are four Intel Hades Canyon NUC which were equipped with two NICs each. One of the two NICs is the Intel Ethernet Controller I210 series which has TSN support.
-
Node 1used the latest StarlingX built from the master branch which supports Kata containers.Node 1was used as the data sender in the tests in this guide. When installing StarlingX it is recommended that ovs-dpdk is not enabled. Current Kata container (version 1.11.0) may have conflict with the vfio device created by dpdk. -
Node 2,Node 3, andNode 4were all installed with Ubuntu 18.04.Node 2additionally installedLinuxPTPwhich was used as the data receiver.Node 3andNode 4were used to send/receive best-effort traffic to stress the TSN network.
-
Enable and verify TSN functionality¶
Preparation is complete and you can enable and verify the TSN functionality in Kata Containers. The whole process can be summarized in three steps:
-
Perform time synchronization across the whole TSN network.
-
Launch a Kata Container with a physical NIC passed in.
-
Make necessary configuration changes to the Kata Container and the TSN switch to enable TSN functionality. After that, run tests to verify the TSN functionality.
Step 1. Perform time synchronization across the TSN network¶
Two programs from the LinuxPTP project, ptp4l and phc2sys, were used to do time synchronization on the TSN network.
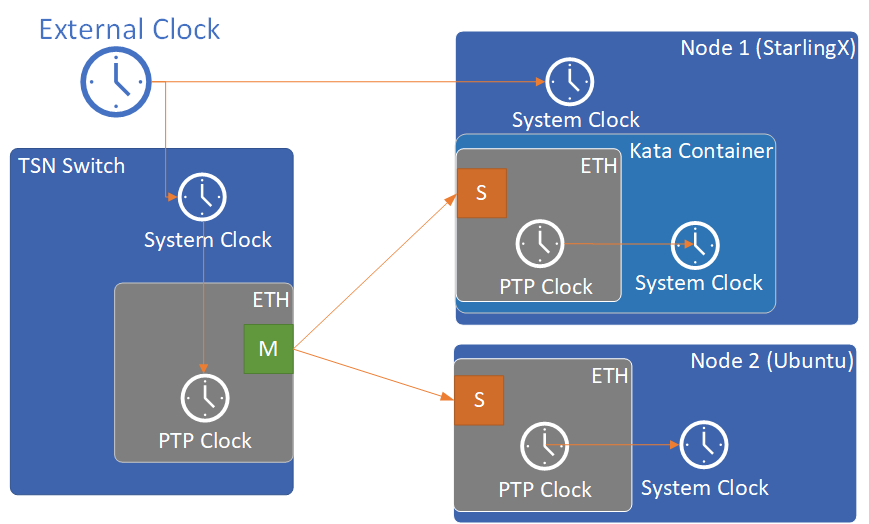
Figure 2: Time synchronization topology¶
-
Configure NTP servers on the TSN switch and on
Node 1 (StarlingX)to synchronize their system clocks with the external clock. A usableNTP serveris a server that you can access on the network you are in. Failure to setup a reachable NTP server can result in failure of testing TSN capability. -
Launch
phc2syson the TSN switch to synchronize its PTP clock from its system clock.# ptp1 is the ptp clock of the TSN interface. We could get this index # by "ethtool -T <tsn_interface>". sudo phc2sys -c /dev/ptp1 -s CLOCK_REALTIME -w -O 0 &Use
syslogwhenever you want to check the status ofphc2sysorptp4l. -
Launch
ptp4lon both the TSN switch andNode 2 (Ubuntu)to synchronize their PTP clocks. The TSN switch’s PTP clock was set as the master clock by default.# For TSN switch sudo ptp4l -f /etc/ptp4l-switch.cfg & # For Ubuntu node sudo ptp4l -f /etc/ptp4l-node.cfg &The content of ptp4l-switch.cfg is shown below.
# "gmCapable" is "1" for switch node, and "0" for all other nodes. [global] gmCapable 1 priority1 128 priority2 128 logAnnounceInterval 1 logSyncInterval -3 syncReceiptTimeout 3 neighborPropDelayThresh 800 min_neighbor_prop_delay -20000000 assume_two_step 1 path_trace_enabled 1 follow_up_info 1 # Generic MAC to broadcast L2 PTP to many NICs (ie. diff MACs) ptp_dst_mac 01:1B:19:00:00:00 network_transport L2 delay_mechanism P2P # Additional Config Parameters tx_timestamp_timeout 100 summary_interval 0 [CE01] transportSpecific 0x1 [CE02] transportSpecific 0x1 [CE03] transportSpecific 0x1 [CE04] transportSpecific 0x1The content of ptp4l-node.cfg is shown below.
# enp5s0 is the tsn interface in the node. Please update it if per your environment. [global] gmCapable 0 priority1 128 priority2 128 logAnnounceInterval 1 logSyncInterval -3 syncReceiptTimeout 3 neighborPropDelayThresh 800 min_neighbor_prop_delay -20000000 assume_two_step 1 path_trace_enabled 1 follow_up_info 0 # Generic MAC to broadcast L2 PTP to many NICs (ie. diff MACs) ptp_dst_mac 01:1B:19:00:00:00 network_transport L2 delay_mechanism P2P # Additional Config Parameters tx_timestamp_timeout 100 summary_interval 0 [enp5s0] transportSpecific 0x1 -
Launch
phc2sysonNode 2 (Ubuntu)to synchronize its system clock from its PTP clock.# enp5s0 is the tsn interface in the node. sudo phc2sys -s enp5s0 -c CLOCK_REALTIME -w -O 0 &
Time synchronization on the Kata Container is done later in this process.
You do not need to set up time synchronization on Node 3 and Node 4 since they were used to send/receive best-effort traffic in the experiment.
The Ubuntu node and the StarlingX container must be configured to have vlan interfaces. Before setting up anything else, you must run the commands below on the Ubuntu node (the StarlingX container is configured later on in Case 2):
# INTERFACE is the name of the I210 network card (the TSN network card)
INTERFACE=enp5s0
ip link add link $INTERFACE name ${INTERFACE}.3 type vlan id 3
ifconfig $INTERFACE up
ip link set ${INTERFACE}.3 up
Step 2. Launch a Kata Container with a physical NIC passed in¶
Before creating a Kata Container, copy the two kernel images vmlinux.container and vmlinuz.container to the directory /usr/share/kata-containers/ of Node 1 (StarlingX).
The Intel Ethernet Controller I210 on the host must be passed into a Kata Container by completing the following steps. More details can be found at How To Pass a Physical NIC Into a Kata Container.
-
Configure the Kata Container:
# Find the PCI address of the I210 NIC. Here the PCI address is # "0000:05:00.0" and the ID is "8086:157b" which are used in the # following steps. lspci -nn -D | grep Ethernet 0000:00:1f.6 Ethernet controller [0200]: Intel Corporation Ethernet Connection (2) I219-LM [8086:15b7] (rev 31) 0000:05:00.0 Ethernet controller [0200]: Intel Corporation I210 Gigabit Network Connection [8086:157b] (rev 03) export BDF="0000:05:00.0" readlink -e /sys/bus/pci/devices/$BDF/iommu_group /sys/kernel/iommu_groups/16 echo $BDF | sudo tee /sys/bus/pci/devices/$BDF/driver/unbind sudo modprobe vfio-pci echo 8086 157b | sudo tee /sys/bus/pci/drivers/vfio-pci/new_id echo $BDF | sudo tee --append /sys/bus/pci/drivers/vfio-pci/bind ls -l /dev/vfio total 0 crw------- 1 root root 241, 0 May 18 15:38 16 crw-rw-rw- 1 root root 10, 196 May 18 15:37 vfio # There should be only one vfio device there, the device that has been passed through. # Edit the /usr/share/defaults/kata-containers/configuration.toml file to # set `hotplug_vfio_on_root_bus` to true.
-
Configure Docker to support Kata Container:
sudo mkdir -p /etc/systemd/system/docker.service.d/ cat <<EOF | sudo tee /etc/systemd/system/docker.service.d/kata-containers.conf [Service] ExecStart= ExecStart=/usr/bin/dockerd -D --add-runtime kata-runtime=/usr/bin/kata-runtime EOF sudo systemctl daemon-reload sudo systemctl restart docker -
Create a Kata Container with the Intel Ethernet Controller I210 passed in. In this example, the name of the container image was
kata_tsn_image.# 2 cpus are needed. 1 dedicated for send or receive data. sudo docker run -it -d --runtime=kata-runtime --cpus 2 --rm --device /dev/vfio/16 -v /dev:/dev --cap-add SYS_NICE --cap-add SYS_TIME --cap-add NET_ADMIN --name tsn kata_tsn_image /bin/bashWhen completed, the I210 NIC should be shown in the created container with the name
eth1.
Step 3. Config and test TSN performance¶
The sample application sample-app-taprio was used in the test. Minor changes were made on the code to format the output to adapt to the two tools (nl-calc and nl-report) provided by the netlatency project and plot the result.
Three test cases were defined in the experiment. For all three test cases, sample-app-taprio was running in the Kata Container as the data sender and running on Node 2 as the data receiver. Common configurations for sample-app-taprio are listed here.
|
Option |
Value |
|---|---|
|
Cycle Time |
2ms |
|
Packet Number |
1 packet/cycle |
|
VLAN ID |
3 |
|
VLAN Priority code point |
6 |
|
SO_PRIORITY |
6 |
During the test, three performance indicators were measured.
|
Indicator |
Meaning |
|---|---|
|
Scheduled times |
Time from the beginning of a cycle to when the NIC receives the packet |
|
RT application latency |
Time from the beginning of a cycle to when the send function is called |
|
TSN Network jitter |
Jitter of scheduled times |
-
Case 1: TSN not enabled.
sample-app-tapriosent a packet at the beginning of each cycle.Before
sample-app-tapriowas executed, time synchronization was performed on the Kata Container.
# Launch PTP programs, ptp4l and phc2sys, to synchronize the PTP clock and
# the system clock.
ptp4l -f /etc/ptp4l.cfg -m &
phc2sys -s eth1 -c CLOCK_REALTIME -w -O 0 -m &
# The content of ptp4l.cfg is shown below.
[global]
gmCapable 0
priority1 128
priority2 128
logAnnounceInterval 1
logSyncInterval -3
syncReceiptTimeout 3
neighborPropDelayThresh 800
min_neighbor_prop_delay -20000000
assume_two_step 1
path_trace_enabled 1
follow_up_info 0
ptp_dst_mac 01:1B:19:00:00:00
network_transport L2
delay_mechanism P2P
tx_timestamp_timeout 100
summary_interval 0
[eth1]
transportSpecific 0x1
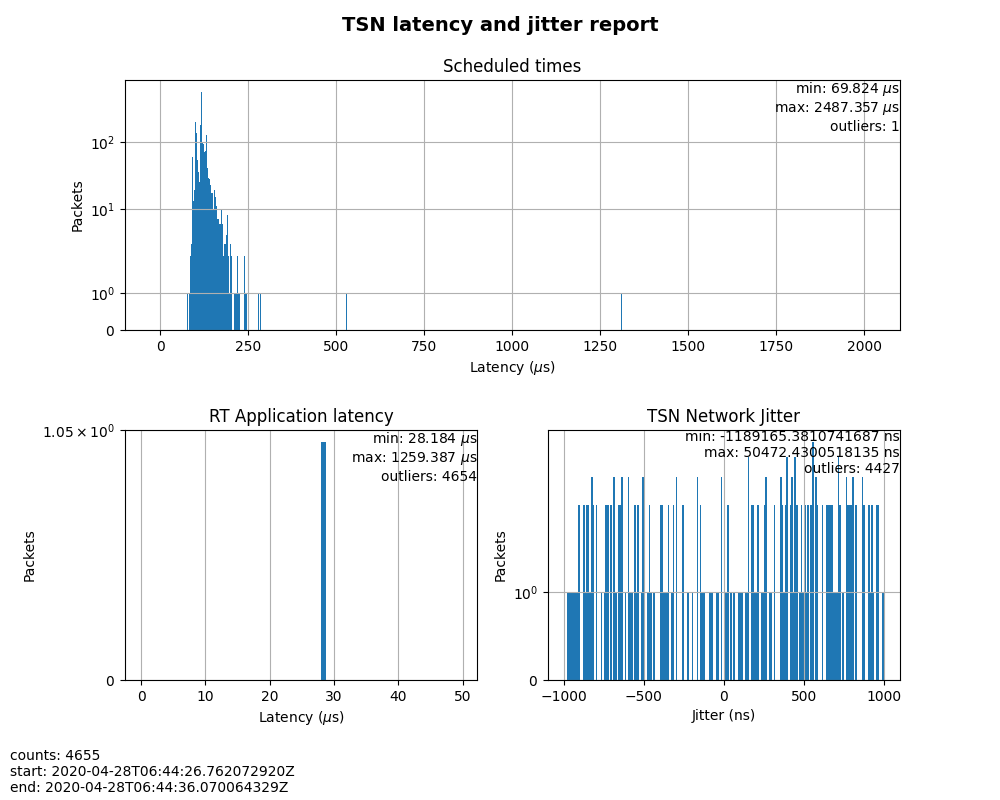
Figure 3: Case 1 performance report¶
As shown in Figure 3, the RT application latency indicator ranged from 28.184us to 1259.387us, due to the following reasons:
-
Standard kernels instead of real-time kernels were used for both StarlingX platform and the Kata Container. (Kata Containers supports the standard kernel.)
-
sample-app-tapriowas running on the Kata Container instead of the host.
Since TSN features were not enabled, there were no controls on Scheduled times, and its behavior depended on the RT application latency indicator and the behavior of the whole network. As shown in the figure, it ranged from 69.824us to 2487.357us, and the measured jitter reached 1ms.
-
Case 2: Enable two qdiscs on the Kata Container.
TAPRIO and ETF were used.
sample-app-tapriohad additional configuration settings as shown in Table 3. Considering the large variance ofRT application latencyin Case 1, the transmitting time was set at 1250us.
|
Option |
Value |
|---|---|
|
Transmit Window |
[1200us, 1300us] |
|
Offset in Window |
50us |
Make necessary configuration changes on the Kata Container before executing sample-app-taprio.
# Change the number of multi-purpose channels
ethtool -L eth1 combined 4
# Delete existing qdiscs
tc qdisc del dev eth1 root
# Enable taprio qdisc, SO_PRIORITY 6 was mapped to traffic class 1.
tc -d qdisc replace dev eth1 parent root handle 100 taprio num_tc 4
map 3 3 3 3 3 3 1 3 3 3 3 3 3 3 3 3
queues 1@0 1@1 1@2 1@3
base-time 1588076872000000000
sched-entry S 01 200000
sched-entry S 02 100000
sched-entry S 04 100000
sched-entry S 08 100000
sched-entry S 01 200000
sched-entry S 02 100000
sched-entry S 04 100000
sched-entry S 08 100000
clockid CLOCK_TAI
# Enable etf qdisc on queue 1 which corresponds to traffic class 1
tc qdisc replace dev eth1 parent 100:2 etf clockid CLOCK_TAI
delta 5000000 offload
# Create vlan interface and set egress map.
ip link add link eth1 name eth1.3 type vlan id 3
vconfig set_egress_map eth1.3 6 6
ifconfig eth1 up
ip link set eth1.3 up
# Launch PTP programs, ptp4l and phc2sys, to synchronize the PTP clock and
# the system clock.
ptp4l -f /etc/ptp4l.cfg -m &
phc2sys -s eth1 -c CLOCK_REALTIME -w -O 0 -m &
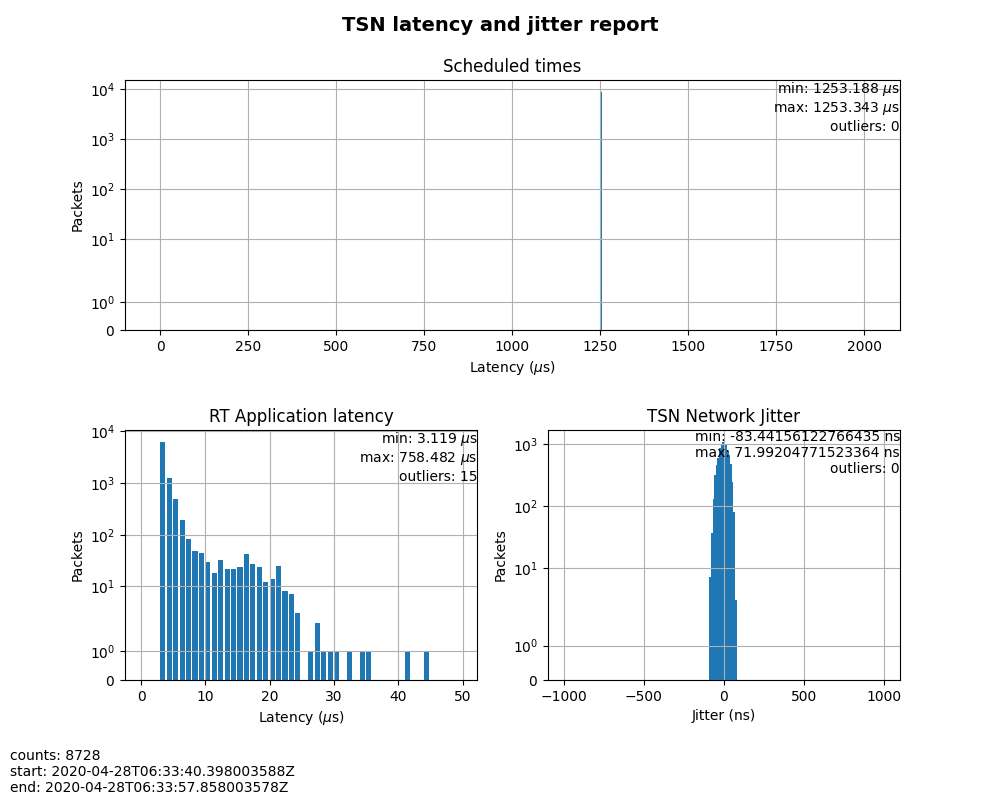
Figure 4: Case 2 performance report¶
In this test, RT Application latency showed similar results to Case 1. This was expected, since there were no optimizations made. Scheduled times was well controlled (ranged from 1253.188us to 1253.343us), which indicates the TSN feature was functional. The measured TSN Network jitter also proves TSN was functional.
-
Case 3: Stress test.
This scenario used the Case 2 settings and enabled 802.1qbv support on the TSN switch. Also,
iperf3was used onNode 3andNode 4for massive best-effort traffic to stress the overall network communication.
# iperf3 -c 192.168.1.2 -b 0 -u -l 1448 -t 86400
Connecting to host 192.168.1.2, port 5201
[ 5] local 192.168.1.3 port 43752 connected to 192.168.1.2 port 5201
[ ID] Interval Transfer Bitrate Total Datagrams
[ 5] 0.00-1.00 sec 114 MBytes 956 Mbits/sec 82570
[ 5] 1.00-2.00 sec 114 MBytes 956 Mbits/sec 82550
[ 5] 2.00-3.00 sec 114 MBytes 957 Mbits/sec 82580
[ 5] 3.00-4.00 sec 114 MBytes 956 Mbits/sec 82560
[ 5] 4.00-5.00 sec 114 MBytes 956 Mbits/sec 82560
[ 5] 5.00-6.00 sec 114 MBytes 956 Mbits/sec 82560
[ 5] 6.00-7.00 sec 114 MBytes 957 Mbits/sec 82570
[ 5] 7.00-8.00 sec 114 MBytes 956 Mbits/sec 82560
# iperf3 -s
-----------------------------------------------------------
Server listening on 5201
-----------------------------------------------------------
Accepted connection from 192.168.1.3, port 48494
[ 5] local 192.168.1.2 port 5201 connected to 192.168.1.3 port 50593
[ ID] Interval Transfer Bitrate Jitter Lost/Total Datagrams
[ 5] 0.00-1.00 sec 42.1 MBytes 353 Mbits/sec 0.055 ms 48060/78512 (61%)
[ 5] 1.00-2.00 sec 44.2 MBytes 371 Mbits/sec 0.066 ms 50532/82531 (61%)
[ 5] 2.00-3.00 sec 44.2 MBytes 371 Mbits/sec 0.063 ms 50593/82592 (61%)
[ 5] 3.00-4.00 sec 44.2 MBytes 371 Mbits/sec 0.059 ms 50534/82534 (61%)
[ 5] 4.00-5.00 sec 44.2 MBytes 371 Mbits/sec 0.060 ms 50619/82619 (61%)
[ 5] 5.00-6.00 sec 44.2 MBytes 371 Mbits/sec 0.062 ms 50506/82504 (61%)
[ 5] 6.00-7.00 sec 44.2 MBytes 371 Mbits/sec 0.059 ms 50563/82563 (61%)
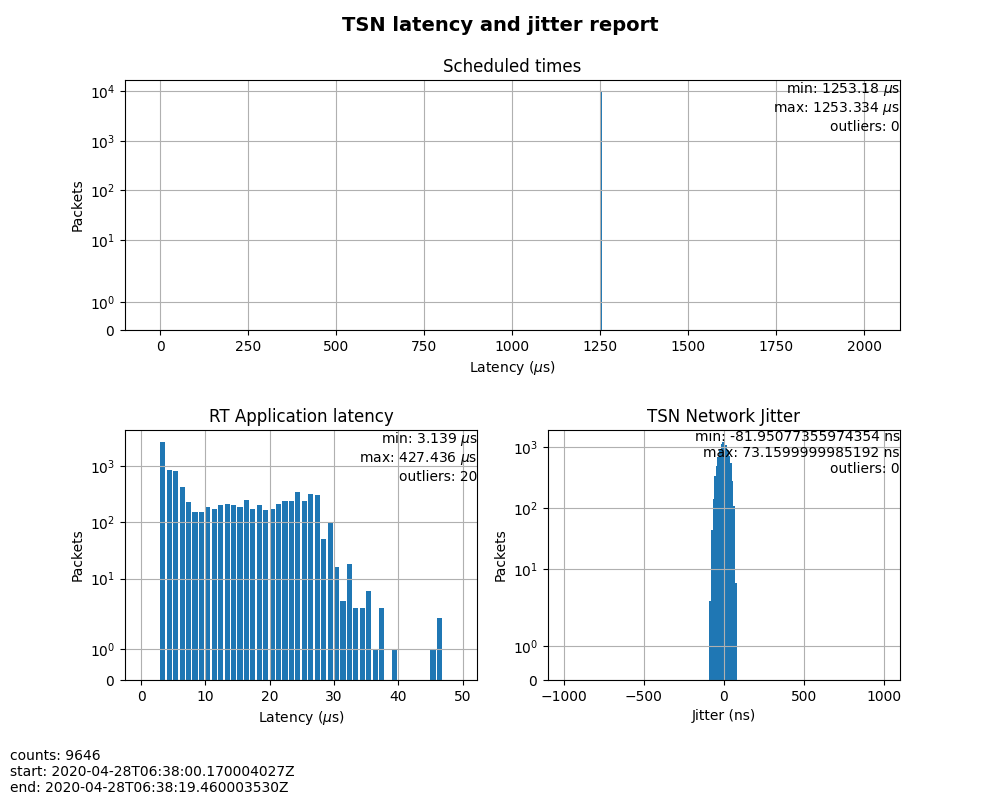
Figure 5: Case 3 performance report¶
The results were very similar to Case 2. The test demonstrated that even when a large amount of best-effort traffic was sent to the TSN network, the time-sensitive packets sent from sample-app-taprio were not impacted. The determinism was still guaranteed.
Summary¶
In this guide, we introduced how to enable TSN support in Kata Containers on the StarlingX platform. The experimental results demonstrated the capability of TSN in Kata Containers. Currently, the cycle time (2ms) is not low enough for some critical use cases. In the future, optimizations could be made to achieve better performance, such as replacing the standard kernel with a real-time kernel.