主从定时器的原理已在上篇博文:
基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序
讲解了,这篇重点就讲如何实现多通道的PWM级联输出。
1.软件环境
Keil5,Cube5.21
2.Cube配置
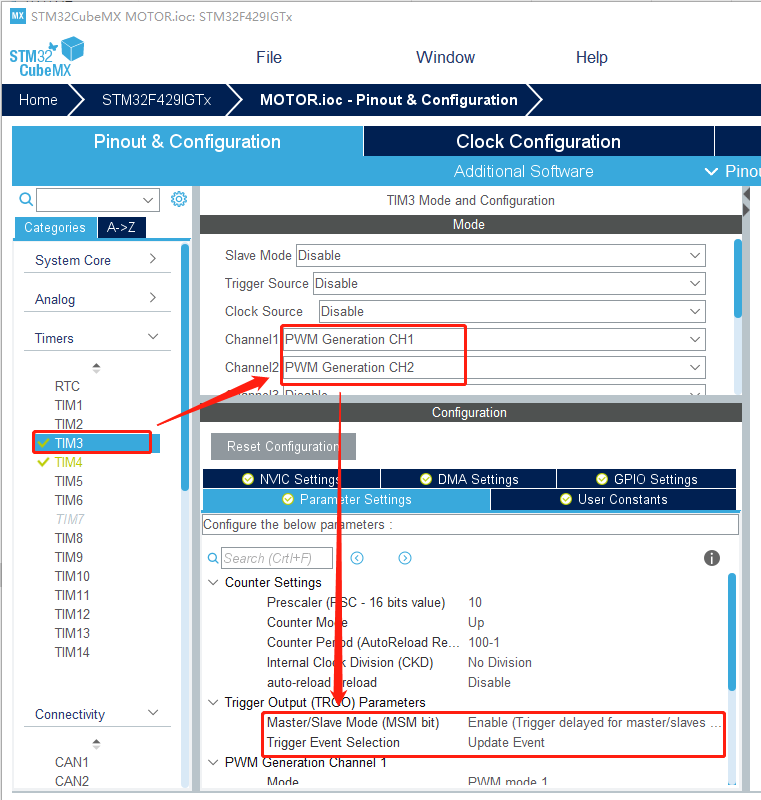
选择定时器3,打开通道1和通道2的PWM输出,然后开启主从模式,触发方式为上升沿触发。
频率和占空比的设置请看上篇博文。
生成的代码 如下
void MX_TIM3_Init(void) { TIM_MasterConfigTypeDef sMasterConfig = {0}; TIM_OC_InitTypeDef sConfigOC = {0}; htim3.Instance = TIM3; htim3.Init.Prescaler = 10; htim3.Init.CounterMode = TIM_COUNTERMODE_UP; htim3.Init.Period = 100-1; htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_PWM_Init(&htim3) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 50; sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) { Error_Handler(); } if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK) { Error_Handler(); } HAL_TIM_MspPostInit(&htim3); }
选择定时器4,从模式为门控模式,触发时钟为TIM3,即ITR2,内部时钟触发
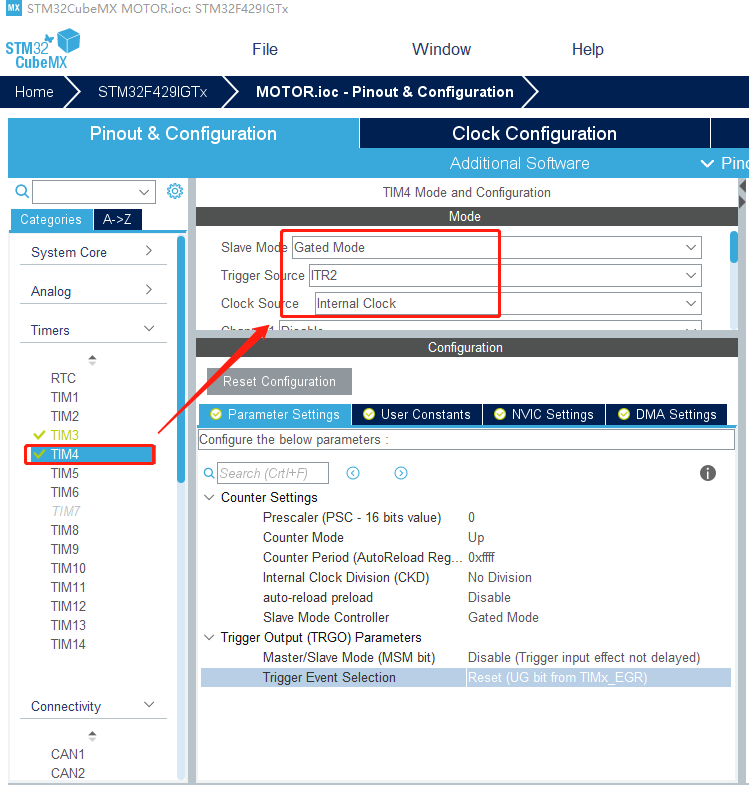

生成的代码如下:
/* TIM4 init function */ void MX_TIM4_Init(void) { TIM_ClockConfigTypeDef sClockSourceConfig = {0}; TIM_SlaveConfigTypeDef sSlaveConfig = {0}; TIM_MasterConfigTypeDef sMasterConfig = {0}; htim4.Instance = TIM4; htim4.Init.Prescaler = 0; htim4.Init.CounterMode = TIM_COUNTERMODE_UP; htim4.Init.Period = 0xffff; htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim4) != HAL_OK) { Error_Handler(); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK) { Error_Handler(); } sSlaveConfig.SlaveMode = TIM_SLAVEMODE_GATED; sSlaveConfig.InputTrigger = TIM_TS_ITR2; if (HAL_TIM_SlaveConfigSynchro(&htim4, &sSlaveConfig) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK) { Error_Handler(); } }
STM32F429的定时器3通道1,2的PWM复用口
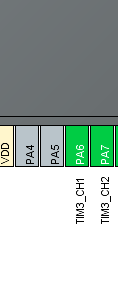
PA6 ------> TIM3_CH1
PA7 ------> TIM3_CH2
3,程序介绍
(1)在主函数里开启定时器的中断功能和PWM输出
TIM_SET_CAPTUREPOLARITY(&htim3,TIM_CHANNEL_1,TIM_ICPOLARITY_RISING) ; // 捕获比较1中断使能 TIM_SET_CAPTUREPOLARITY(&htim3,TIM_CHANNEL_2,TIM_ICPOLARITY_RISING) ; // 捕获比较2中断使能 __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,6400) ; // 输入通道1的捕获比较值CCR1 ,PWM个数为6400个 __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_2,6400) ; // 输入通道2的捕获比较值CCR2 HAL_TIM_OC_Start_IT(&htim4,TIM_CHANNEL_1) ; //开启定时器4通道1的输入捕获中断 HAL_TIM_OC_Start_IT(&htim4,TIM_CHANNEL_2) ; //开启定时器4通道2的输入捕获中断 PostInit(); //这个是为了控制通道2的复用GPIO口PA7,可忽略 HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1); //开启定时器3通道1的PWM输出中断 HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_2); //开启定时器3通道2的PWM输出中断
(2)在PWM中断轮询函数关闭定时器的中断功能和PWM输出
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim) //重写PWM中断轮询弱函数 { if(__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC1) != RESET) //判断是否生成中断标志位SR { if(__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC1) !=RESET) //定时器中断使能是否开启 { __HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_CC1); //清除中断标志位SR if(HAL_TIM_PWM_Stop_IT(&htim3, TIM_CHANNEL_1)==HAL_OK) //关闭定时器3的通道1的PWM输出 { HAL_TIM_OC_Stop_IT(&htim4,TIM_CHANNEL_1) ; //关闭定时器4的通道1的输入中断捕获 FLAG1_OK = 1; //关闭标志置1 } } } //下面的通道2同理如此 if(__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC2) != RESET) { if(__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC2) !=RESET) { __HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_CC2); //清除标志位 PostDeInit(); //这个是为了控制通道2的复用GPIO口PA7,可忽略 if(HAL_TIM_PWM_Stop_IT(&htim3, TIM_CHANNEL_2)==HAL_OK) { HAL_TIM_OC_Stop_IT(&htim4,TIM_CHANNEL_2) ; FLAG2_OK = 1; } } } if( FLAG1_OK == 1&&FLAG2_OK == 1) { FLAG1_OK = 0; FLAG2_OK = 0; FLAG1_Static =2; __HAL_TIM_SET_COUNTER(&htim4,0); //如果两个通道都关闭好了,就把计数装载值CNT清零 TIM_CCxChannelCmd(TIM3,TIM_CHANNEL_2,TIM_CCx_ENABLE); //这个是为了控制通道2的复用GPIO口PA7,可忽略 // //Delay100ms(); } }
重头戏来了!!!如果你发现以上代码,通道1,2的GPIO口只能输出通道1的波形,说明你的中断只是进了通道1的,但通道2也触发了
原因就是两者的中断标志位都被清零了,而且是HAL库自动清零的。
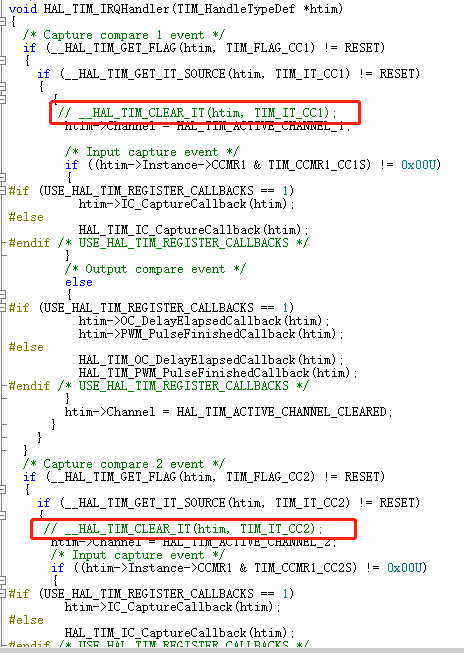
两个被注释掉的函数就是HAL库帮你清零的语句,你手动注释掉就行了。
4.注意事项
(1)小心使用延迟函数,定时器可能和延迟函数有冲突;
(2)如果你发现你不能输出超过255个波形,那就在初始化哪里加个__HAL_TIM_SET_AUTORELOAD(&htim4, 0xffff) ,
既往ARR装载0xffff。
(3)下图的3个函数是用来调控PA7这个PWM复用口的,如果你发现你的PWM波形神奇的自动下降沿计数的话,就用来试下吧。
void PostDeInit(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOA_CLK_ENABLE(); GPIO_InitStruct.Pin =GPIO_PIN_7; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_PULLDOWN; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // GPIO_InitStruct.Alternate = 0x00; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } void PostInit(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOA_CLK_ENABLE(); GPIO_InitStruct.Pin =GPIO_PIN_7; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; GPIO_InitStruct.Alternate = 0x02; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } TIM_CCxChannelCmd(TIM3,TIM_CHANNEL_2,TIM_CCx_ENABLE);