在前一届政府中,导航员就接下来要做的事提出了各种建议。他们给的指示是关于改变车道的事情,
车道之后,转弯等。但实际上并没有那么多类型的您期望从导航器听到的建议。在本课中,我们将教授一种行为规划方法
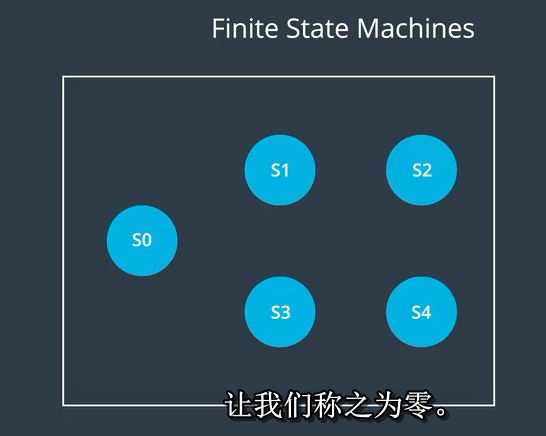
使用称为有限状态机的东西来解决行为规划问题。有限状态机根据离散状态的有限集合做出决定。
在这个例子中五个状态。初始化时,有限状态机开始处于某种起始状态,让我们称之为零。
有限状态机内的任何状态对可以通过一个或多个转换连接。有时候会有一个转变回到同一个状态。
这被称为自我转换。并非所有的转换都是必要的。
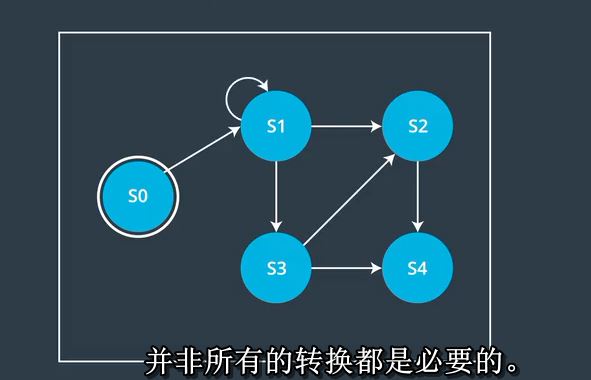
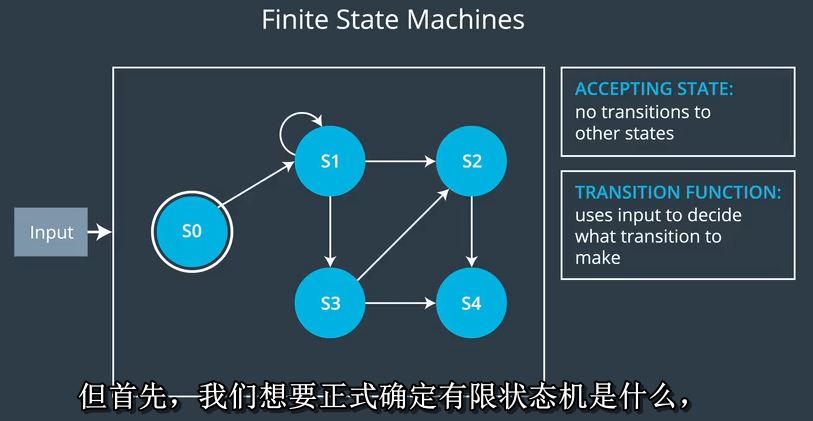
例如,S4不会转换到任何其他状态.。在有限状态机的语言中,这将被称为接受状态。
对于非接受状态,通常可能是多个潜在的继承状态。要决定转换到下一个状态,
有限状态机需要处理某种输入和然后使用状态转换函数来决定接下来的状态。
我们将更多地讨论转换函数和一分钟内与一辆自驾车相关的州。
但首先,我们想要正式确定有限状态机是什么,在一个简单的例子的帮助下。