1.创建功能包
cd ~/catkin_workspace/src
catkin_create_pkg learning_topic std_msgs rospy roscpp geometry_msgs turtlesim
cd ~/catkin_workspace/src/topic_publisher/src
2.编辑代码
gedit velocity_publishes.cpp
/** * 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist */ #include <ros/ros.h> #include <geometry_msgs/Twist.h> int main(int argc, char **argv) { // ROS节点初始化 ros::init(argc, argv, "velocity_publishes"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10 ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10); // 设置循环的频率 ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { // 初始化geometry_msgs::Twist类型的消息 geometry_msgs::Twist vel_msg; vel_msg.linear.x = 0.5; vel_msg.angular.z = 0.2; // 发布消息 turtle_vel_pub.publish(vel_msg); ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.angular.z); // 按照循环频率延时 loop_rate.sleep(); } return 0; }
3.编译代码
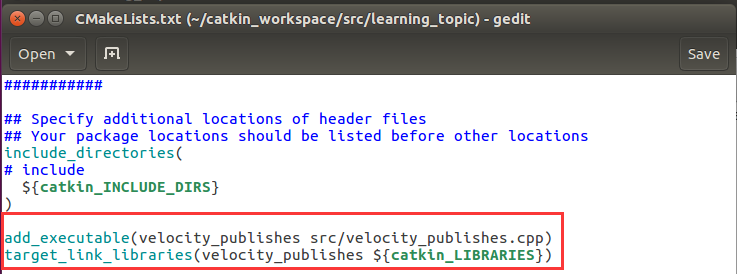
3.1修改cmakelists.txt
添加这两句:
add_executable(velocity_publishessrc/velocity_publishes.cpp)
target_link_libraries(velocity_publishes${catkin_LIBRARIES})
3.2 编译
catkin_make
3.3设置环境变量
source devel/setup.bash
为了避免每次设置在/home目录下
ctrl+h
编辑.bashrc
source /home/<user_name>/<worksapce_name>/devel/setup.bash
4运行节点
重新打开终端
roscore
运行海龟仿真器
rosrun turtlesim turtlesim_node
运行节点
rosrun <功能包名> <节点名>
rosrun topic_publisher velocity_publishes
运行的就是该编译好的工程
