目标检测物体的候选框是如何产生的?
如今深度学习火热的今天,RCNN/SPP-Net/Fast-RCNN等文章都会谈及bounding boxes(候选边界框)的生成与筛选策略。那么候选框是如何产生,又是如何进行筛选的呢?其实物体候选框获取当前主要使用图像分割与区域生长技术。区域生长(合并)主要由于检测图像中存在的物体具有局部区域相似性(颜色、纹理等)。目标识别与图像分割技术的发展进一步推动有效提取图像中信息。滑窗法作为一种经典的物体检测方法,个人认为不同大小的窗口在图像上进行滑动时候,进行卷积运算后的结果与已经训练好的分类器判别存在物体的概率。选择性搜索(Selective Search)是主要运用图像分割技术来进行物体检测。
—————————— 滑窗法(Sliding Window) ——————————
首先来看一下滑窗法的物体检测流程图:
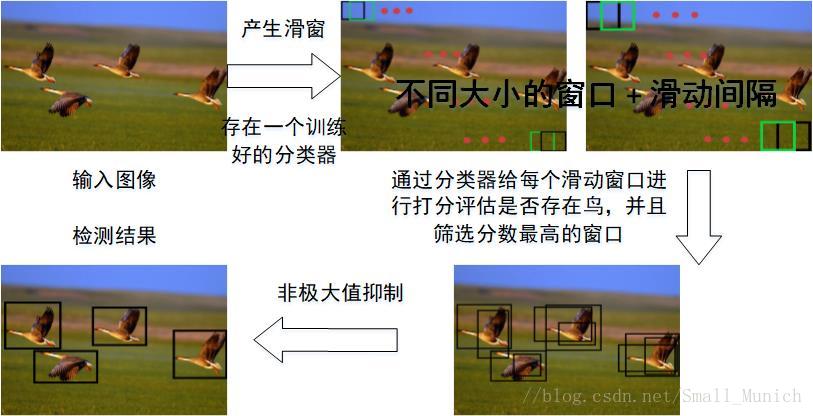
通过滑窗法流程图可以很清晰理解其主要思路:首先对输入图像进行不同窗口大小的滑窗进行从左往右、从上到下的滑动。每次滑动时候对当前窗口执行分类器(分类器是事先训练好的)。如果当前窗口得到较高的分类概率,则认为检测到了物体。对每个不同窗口大小的滑窗都进行检测后,会得到不同窗口检测到的物体标记,这些窗口大小会存在重复较高的部分,最后采用非极大值抑制(Non-Maximum Suppression, NMS)的方法进行筛选。最终,经过NMS筛选后获得检测到的物体。
滑窗法简单易于理解,但是不同窗口大小进行图像全局搜索导致效率低下,而且设计窗口大小时候还需要考虑物体的长宽比。所以,对于实时性要求较高的分类器,不推荐使用滑窗法。
—————————— 选择搜索(Selective Search) —————————
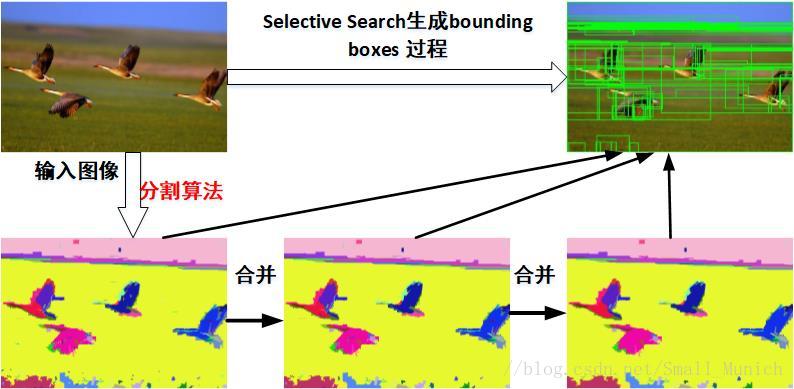
同样来看一下选择搜索的物体检测流程图:
滑窗法类似穷举进行图像子区域搜索,但是一般情况下图像中大部分子区域是没有物体的。学者们自然而然想到只对图像中最有可能包含物体的区域进行搜索以此来提高计算效率。选择搜索方法是当下最为熟知的图像bouding boxes提取算法,由Koen E.A于2011年提出,具体详见论文。下面大致说一下选择搜索算法的过程:
选择搜索算法的主要观点:图像中物体可能存在的区域应该是有某些相似性或者连续性区域的。因此,选择搜索基于上面这一想法采用子区域合并的方法进行提取bounding boxes候选边界框。首先,对输入图像进行分割算法产生许多小的子区域。其次,根据这些子区域之间相似性(相似性标准主要有颜色、纹理、大小等等)进行区域合并,不断的进行区域迭代合并。每次迭代过程中对这些合并的子区域做bounding boxes(外切矩形),这些子区域外切矩形就是通常所说的候选框。
选择搜索优点:
计算效率优于滑窗法。
由于采用子区域合并策略,所以可以包含各种大小的疑似物体框。
合并区域相似的指标多样性,提高了检测物体的概率。