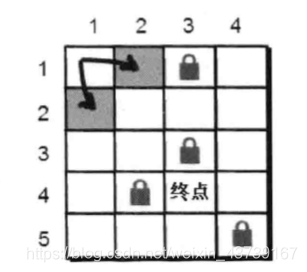
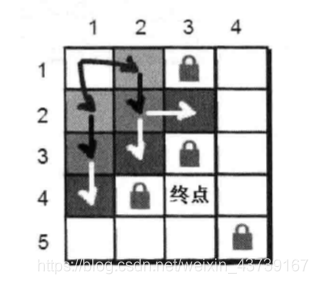
小哈迷宫搜救记之——
广度优先搜索

#include <stdio.h>
typedef struct note
{
int x;
int y;
int step;
};
int main(int argc, char const *argv[])
{
struct note que[2501];//因为地图大小不会超过50*50,所以地图扩展不过超过2500
int a[51][51]={0};//存储地图
int book[51][51]={0};//标记已经走过的路线
int next[4][2]={
{0,+1},//you
{+1,0},//xia
{0,-1},//zuo
{-1,0}//shang
};
int head,tail;
int n,m,flag,xstart,ystart,p,q,tx,ty;
printf("Read The Map:
");
printf("Input the size of the map:
");
scanf("%d %d",&n,&m);
for (int i = 1; i <= n; i++)
{
for (int j = 1; j <= m; j++)
{
scanf("%d",&a[i][j]);
}
}
printf("Input the xstart ystart and xend yend:
");
scanf("%d %d %d %d",&xstart,&ystart,&p,&q);
//队列初始化
head=1;
tail=1;
//往队列中插入地图入口坐标
que[tail].x=xstart;
que[tail].y=ystart;
que[tail].step=0;
tail++;
book[xstart][ystart]=1;//标记起点已在路径中
flag=0;//表示暂时没有到达目标点
//当队列不为空的时候循环
while (tail>head)
{
for (int i = 0; i <= 3; i++)
{
//计算下一个点的坐标
tx=que[head].x+next[i][0];
ty=que[head].y+next[i][1];
//判断是否越界
if(tx<1||ty<1||tx>n||ty>m)
continue;
//判断是否是障碍物或者已经在路径之中
if(a[tx][ty]==0 && book[tx][ty]==0)
{
//标记该点已经走过
book[tx][ty]=1;
//插入新的点到队列中去
que[tail].x=tx;
que[tail].y=ty;
que[tail].step=que[head].step+1;
tail++;
}
if (tx==p && ty==q)
{
flag=1;
break;
}
}
if (flag==1)
{
break;
}
head++;//当一个点扩展结束后,head++才能对后面的点进行扩展
}
printf("%d",que[tail-1].step);
return 0;
}