在ICCP算法当中,从高度/重力地图中提取等值线是重要步骤。1999年的文章《Vehicle localization on gravity maps》中详细地介绍了ICCP算法每一个步骤的实现方法。
其中,提取等值线部分的算法叙述如下:
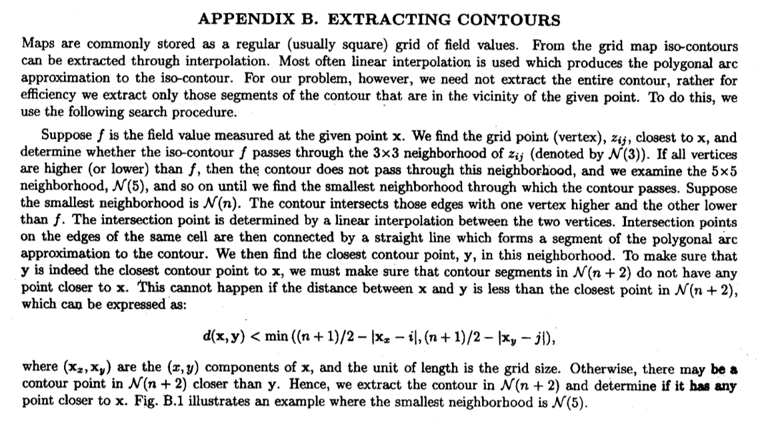
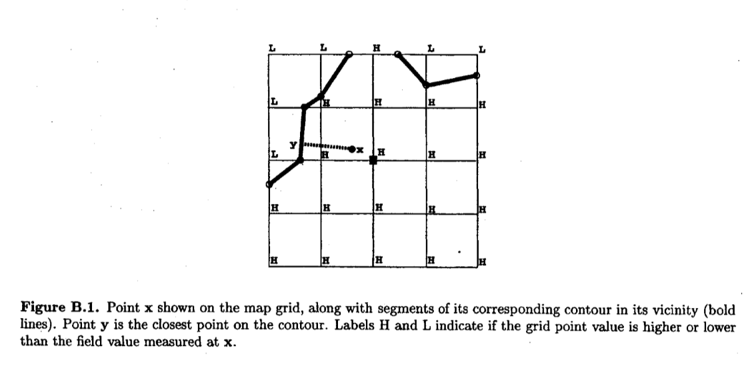
大致过程是搜索规定区域内每个网格点的四条边,判断等值线是否经过其中两条边。若水深/重力等值线f值在某条边的两个端点的值之间,则认为等值线经过该条边。
假设等值线与一条横边相交,等值线与该条边的交点横坐标为:
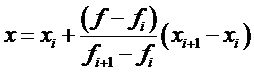
纵坐标与该条边的网格点相同。
在提取得到等值线数据后,需要寻找等值线上最近点,算法叙述如下: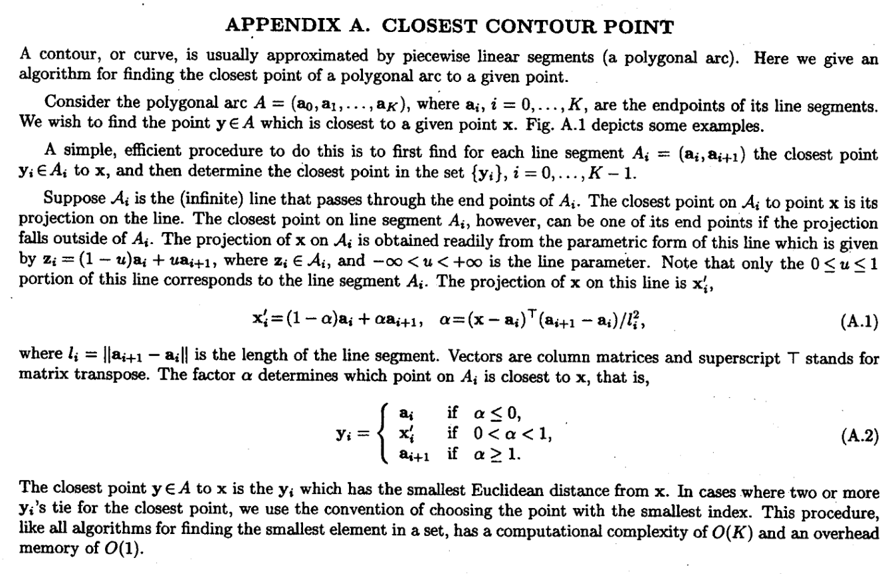
寻找等值线上最近点的方法是,首先,计算INS指示点向每一条等值线线段投影的最近距离,记录投影点坐标;比较各个最近距离,选择其中最小的,作为最终的等值线最近点。
根据该论文中给出的例子,设计网格点坐标和坐标对应的水深/重力值。假设需要提取的等值线值为f=2。
MATLAB代码如下:
xx=[0,1,2,3,4];
yy=[4;3;2;1;0];
for i=1:5
xx(i,:)=[0,1,2,3,4];
end
for i=1:5
yy(:,i)=[4;3;2;1;0];
end
zz=[0,0,5,0,0;
0,3,5,4,4;
0,4,5,5,5;
5,5,5,5,5;
5,5,5,5,5]; %创建网格点坐标及重力值
k=1;
f=2; %待提取等值线值
XX=[1.8,2.2]; %待匹配点坐标
yy=[4;3;2;1;0];
for i=1:5
xx(i,:)=[0,1,2,3,4];
end
for i=1:5
yy(:,i)=[4;3;2;1;0];
end
zz=[0,0,5,0,0;
0,3,5,4,4;
0,4,5,5,5;
5,5,5,5,5;
5,5,5,5,5]; %创建网格点坐标及重力值
k=1;
f=2; %待提取等值线值
XX=[1.8,2.2]; %待匹配点坐标
%% 提取等值线
%寻找搜索区域中心点(距离XX最近的网格点)
min_d=10000;
for i=1:length(zz)
for j=1:length(zz)
distance=sqrt((XX(1)-xx(i,j))^2+(XX(2)-yy(i,j))^2);
if distance<min_d
min_d=distance;
center=[xx(i,j),yy(i,j)];
center_i=i;
center_j=j;
end
end
end
%在3*3区域内搜索是否有等值线
x=zeros(3,3);
y=zeros(3,3);
z=zeros(3,3);
left_i=center_i-1;
left_j=center_j-1; %搜索区域左顶点标号
for i=1:3
for j=1:3
x(i,j)=xx(left_i+i-1,left_j+j-1);
y(i,j)=yy(left_i+i-1,left_j+j-1);
z(i,j)=zz(left_i+i-1,left_j+j-1);
end
end
%是否需要扩大搜索区域
flag=0;
if f>max(max(z))
flag=1;
end
%寻找搜索区域中心点(距离XX最近的网格点)
min_d=10000;
for i=1:length(zz)
for j=1:length(zz)
distance=sqrt((XX(1)-xx(i,j))^2+(XX(2)-yy(i,j))^2);
if distance<min_d
min_d=distance;
center=[xx(i,j),yy(i,j)];
center_i=i;
center_j=j;
end
end
end
%在3*3区域内搜索是否有等值线
x=zeros(3,3);
y=zeros(3,3);
z=zeros(3,3);
left_i=center_i-1;
left_j=center_j-1; %搜索区域左顶点标号
for i=1:3
for j=1:3
x(i,j)=xx(left_i+i-1,left_j+j-1);
y(i,j)=yy(left_i+i-1,left_j+j-1);
z(i,j)=zz(left_i+i-1,left_j+j-1);
end
end
%是否需要扩大搜索区域
flag=0;
if f>max(max(z))
flag=1;
end
if f<min(min(z))
flag=1;
end
%提取等值线
if flag==1 %扩充搜索区域为5*5
x=zeros(5,5);
y=zeros(5,5);
z=zeros(5,5);
left_i=center_i-2;
left_j=center_j-2; %搜索区域左顶点标号
for i=1:5
for j=1:5
x(i,j)=xx(left_i+i-1,left_j+j-1);
y(i,j)=yy(left_i+i-1,left_j+j-1);
z(i,j)=zz(left_i+i-1,left_j+j-1);
end
end
for i=1:5 %搜索网格点
for j=1:5
if z(i,j)==f
contour(k,1)=xx(i,j);
contour(k,2)=yy(i,j);
k=k+1;
end
end
end
for i=1:4
for j=1:4
if (f>z(i,j) && f<z(i,j+1)) || (f>z(i,j+1) && f<z(i,j)) %网格单元上边
contour(k,1)=xx(i,j)+(f-z(i,j))/(z(i,j+1)-z(i,j))*(xx(i,j+1)-xx(i,j));
contour(k,2)=yy(i,j);
k=k+1;
end
if (f>z(i+1,j) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i+1,j)) %网格单元下边
contour(k,1)=xx(i+1,j)+(f-z(i+1,j))/(z(i+1,j+1)-z(i+1,j))*(xx(i+1,j+1)-xx(i+1,j));
contour(k,2)=yy(i+1,j);
k=k+1;
end
if (f>z(i,j) && f<z(i+1,j)) || (f>z(i+1,j) && f<z(i,j)) %网格左边
contour(k,1)=xx(i,j);
contour(k,2)=yy(i,j)+(f-z(i,j))/(z(i+1,j)-z(i,j))*(yy(i+1,j)-yy(i,j));
k=k+1;
end
if (f>z(i,j+1) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i,j+1)) %网格右边
contour(k,1)=xx(i,j+1);
contour(k,2)=yy(i,j+1)+(f-z(i,j+1))/(z(i+1,j+1)-z(i,j+1))*(yy(i+1,j+1)-yy(i,j+1));
k=k+1;
end
end
end
else %搜索3*3区域
for i=1:2
for j=1:2
if (f>z(i,j) && f<z(i,j+1)) || (f>z(i,j+1) && f<z(i,j)) %网格单元上边
contour(k,1)=xx(i,j)+(f-z(i,j))/(z(i,j+1)-z(i,j))*(xx(i,j+1)-xx(i,j));
contour(k,2)=yy(i,j);
k=k+1;
end
if (f>z(i+1,j) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i+1,j)) %网格单元下边
contour(k,1)=xx(i+1,j)+(f-z(i+1,j))/(z(i+1,j+1)-z(i+1,j))*(xx(i+1,j+1)-xx(i+1,j));
contour(k,2)=yy(i+1,j);
k=k+1;
end
if (f>z(i,j) && f<z(i+1,j)) || (f>z(i+1,j) && f<z(i,j)) %网格左边
contour(k,1)=xx(i,j);
contour(k,2)=yy(i,j)+(f-z(i,j))/(z(i+1,j)-z(i,j))*(yy(i+1,j)-yy(i,j));
k=k+1;
end
if (f>z(i,j+1) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i,j+1)) %网格右边
contour(k,1)=xx(i,j+1);
contour(k,2)=yy(i,j+1)+(f-z(i,j+1))/(z(i+1,j+1)-z(i,j+1))*(yy(i+1,j+1)-yy(i,j+1));
k=k+1;
end
end
end
end
flag=1;
end
%提取等值线
if flag==1 %扩充搜索区域为5*5
x=zeros(5,5);
y=zeros(5,5);
z=zeros(5,5);
left_i=center_i-2;
left_j=center_j-2; %搜索区域左顶点标号
for i=1:5
for j=1:5
x(i,j)=xx(left_i+i-1,left_j+j-1);
y(i,j)=yy(left_i+i-1,left_j+j-1);
z(i,j)=zz(left_i+i-1,left_j+j-1);
end
end
for i=1:5 %搜索网格点
for j=1:5
if z(i,j)==f
contour(k,1)=xx(i,j);
contour(k,2)=yy(i,j);
k=k+1;
end
end
end
for i=1:4
for j=1:4
if (f>z(i,j) && f<z(i,j+1)) || (f>z(i,j+1) && f<z(i,j)) %网格单元上边
contour(k,1)=xx(i,j)+(f-z(i,j))/(z(i,j+1)-z(i,j))*(xx(i,j+1)-xx(i,j));
contour(k,2)=yy(i,j);
k=k+1;
end
if (f>z(i+1,j) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i+1,j)) %网格单元下边
contour(k,1)=xx(i+1,j)+(f-z(i+1,j))/(z(i+1,j+1)-z(i+1,j))*(xx(i+1,j+1)-xx(i+1,j));
contour(k,2)=yy(i+1,j);
k=k+1;
end
if (f>z(i,j) && f<z(i+1,j)) || (f>z(i+1,j) && f<z(i,j)) %网格左边
contour(k,1)=xx(i,j);
contour(k,2)=yy(i,j)+(f-z(i,j))/(z(i+1,j)-z(i,j))*(yy(i+1,j)-yy(i,j));
k=k+1;
end
if (f>z(i,j+1) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i,j+1)) %网格右边
contour(k,1)=xx(i,j+1);
contour(k,2)=yy(i,j+1)+(f-z(i,j+1))/(z(i+1,j+1)-z(i,j+1))*(yy(i+1,j+1)-yy(i,j+1));
k=k+1;
end
end
end
else %搜索3*3区域
for i=1:2
for j=1:2
if (f>z(i,j) && f<z(i,j+1)) || (f>z(i,j+1) && f<z(i,j)) %网格单元上边
contour(k,1)=xx(i,j)+(f-z(i,j))/(z(i,j+1)-z(i,j))*(xx(i,j+1)-xx(i,j));
contour(k,2)=yy(i,j);
k=k+1;
end
if (f>z(i+1,j) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i+1,j)) %网格单元下边
contour(k,1)=xx(i+1,j)+(f-z(i+1,j))/(z(i+1,j+1)-z(i+1,j))*(xx(i+1,j+1)-xx(i+1,j));
contour(k,2)=yy(i+1,j);
k=k+1;
end
if (f>z(i,j) && f<z(i+1,j)) || (f>z(i+1,j) && f<z(i,j)) %网格左边
contour(k,1)=xx(i,j);
contour(k,2)=yy(i,j)+(f-z(i,j))/(z(i+1,j)-z(i,j))*(yy(i+1,j)-yy(i,j));
k=k+1;
end
if (f>z(i,j+1) && f<z(i+1,j+1)) || (f>z(i+1,j+1) && f<z(i,j+1)) %网格右边
contour(k,1)=xx(i,j+1);
contour(k,2)=yy(i,j+1)+(f-z(i,j+1))/(z(i+1,j+1)-z(i,j+1))*(yy(i+1,j+1)-yy(i,j+1));
k=k+1;
end
end
end
end
%% 寻找等值线上最近点
n=length(contour);
i=1;
nn=1;
%获得等值线线段上最近点集合xi
for i=1:2:n
x1=contour(i,:);
x2=contour(i+1,:);
l=sqrt((x1(1)-x2(1))^2+(x1(2)-x2(2))^2); %等值线线段长度
alpha=(XX-x1)*(x2-x1)'/l^2;
if alpha<=0
xi(nn,:)=x1;
elseif alpha>=1
xi(nn,:)=x2;
elseif alpha>0 && alpha<1
xi(nn,:)=(1-alpha)*x1+alpha*x2;
end
nn=nn+1;
end
%获得最近点yi
min_d=10000;
for i=1:nn-1
distance=sqrt((XX(1)-xi(i,1))^2+(XX(2)-xi(i,2))^2);
if distance<min_d
min_d=distance;
yi=xi(i,:);
end
end
n=length(contour);
i=1;
nn=1;
%获得等值线线段上最近点集合xi
for i=1:2:n
x1=contour(i,:);
x2=contour(i+1,:);
l=sqrt((x1(1)-x2(1))^2+(x1(2)-x2(2))^2); %等值线线段长度
alpha=(XX-x1)*(x2-x1)'/l^2;
if alpha<=0
xi(nn,:)=x1;
elseif alpha>=1
xi(nn,:)=x2;
elseif alpha>0 && alpha<1
xi(nn,:)=(1-alpha)*x1+alpha*x2;
end
nn=nn+1;
end
%获得最近点yi
min_d=10000;
for i=1:nn-1
distance=sqrt((XX(1)-xi(i,1))^2+(XX(2)-xi(i,2))^2);
if distance<min_d
min_d=distance;
yi=xi(i,:);
end
end
%画图plot(xx(:),yy(:),'k.');
grid on;
hold on;
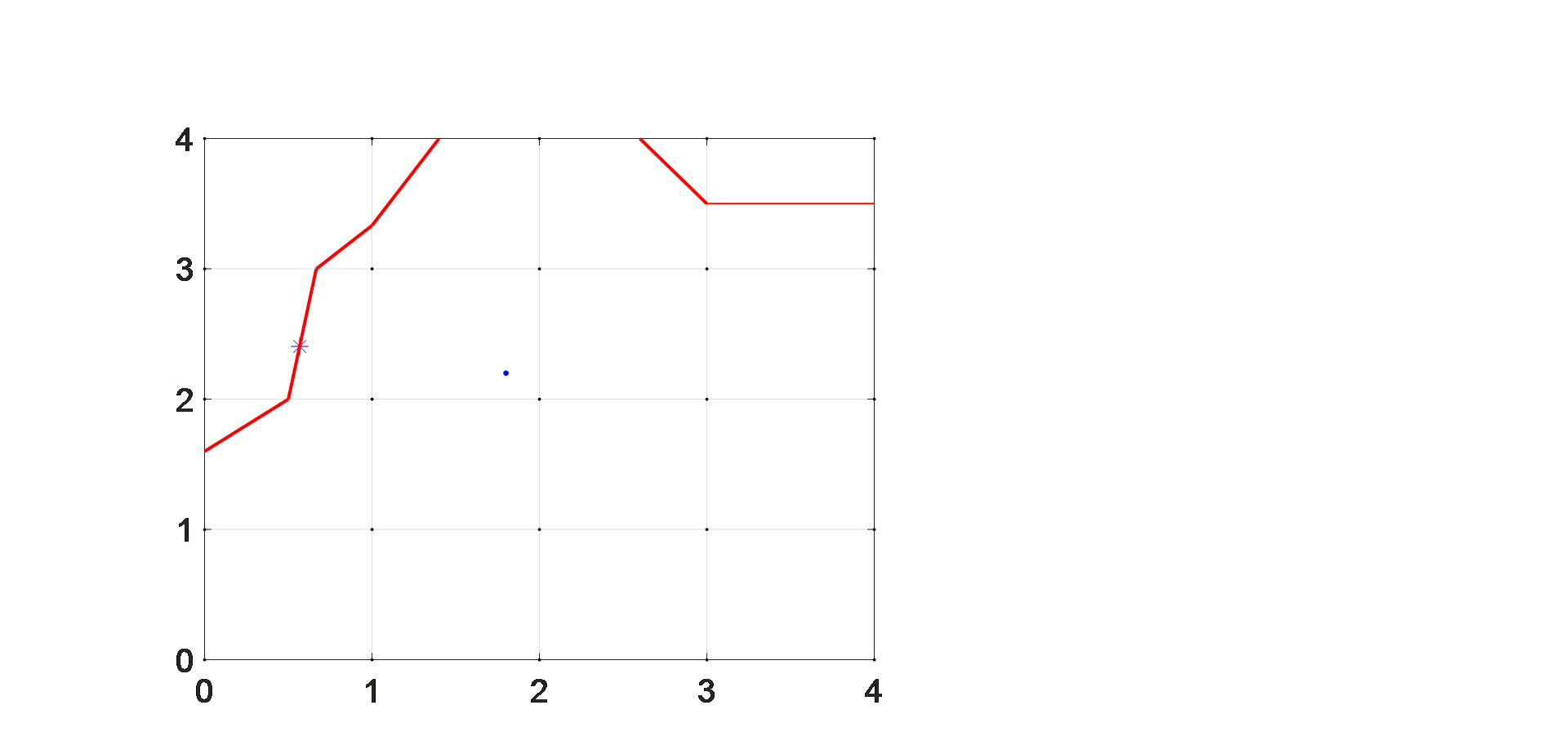
plot(XX(1),XX(2),'b.');
plot(yi(1),yi(2),'*b');
for i=1:2:11
plot(contour(i:i+1,1),contour(i:i+1,2),'r-');
hold on;
end
需要注意的是,储存经过网格单元等值线线段的两个端点,便于后续寻找等值线上最近点。在网格单元内不对水深/重力值进行插值。
得到的提取等值线(红色)结果和最近点如图: