复位的功能是很有必要的,让一切正在处于工作状态的器件的状态恢复到初始态,可以起到重新开始工作的作用。复位有上电复位和按键复位两种常见方式。
先说一下按键复位。
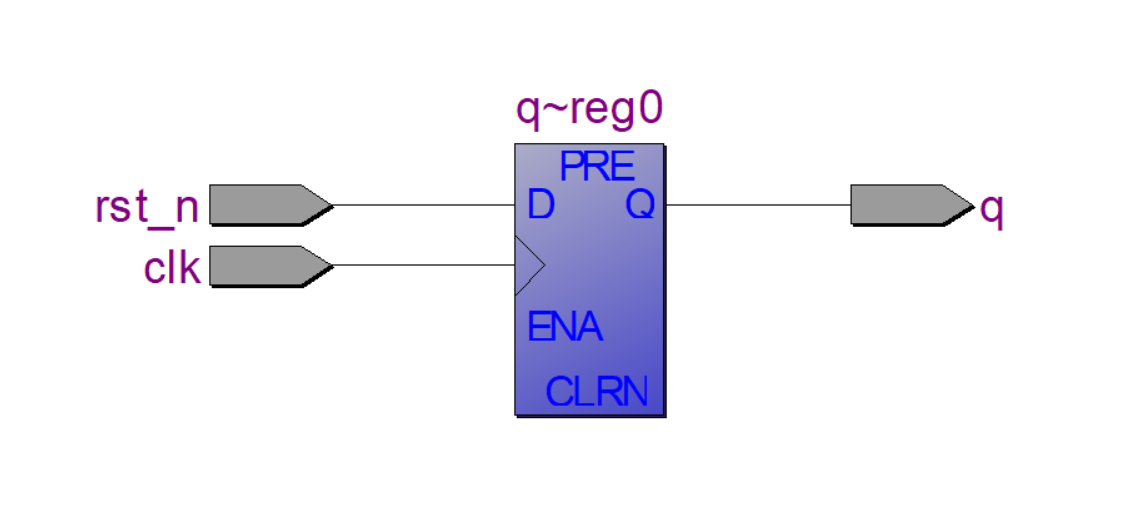
一开始,我们在设计按键复位的逻辑功能时,第一反应就是利用D触发器的异步清零端(clr端),这种方式称为异步复位,代码和RTL图如下:
1 always@(posedge clk or negedge rst_n) 2 begin 3 if(rst_n == 1'b0) 4 q <= 1'b0; 5 else 6 q <= 1'b1; 7 end

采取异步复位的方式的优点是不需要额外的资源,直接使用寄存器自带的异步清零端即可。缺点是存在亚稳态状态。
1. 当clk上升沿到来时,rst_n正好由高电平变为低电平(处于复位状态),这时rst_n具有优先级,寄存器直接进行初始态。
2. 当clk上升沿到来时,rst_n正好由低电平变为高电平(处于置位状态),这时寄存器是认为rst_n为1,锁存此刻的值a,输出前一个时钟周期的b呢,还是认为rst_n为0,该开始初始化了呢(打架了,造成了亚稳态)
那这种方式存在问题,我们再来看看同步复位的方式,代码和RTL图如下:
1 always@(posedge clk) 2 begin 3 if(rst_n == 1'b0) 4 q <= 1'b0; 5 else 6 q <= 1'b1; 7 end
1. 当clk上升沿到来时,rst_n正好由高电平变为低电平(处于复位状态),此刻寄存器仅受clk的控制,认为采样到的是rst_n的高电平,继续输出已存数值,下一个时钟周期才认为rst_n是低电平,进行初始化。
2. 当clk上升沿到来时,rst_n正好由低电平变为高电平(处于置位状态),此刻寄存器仅受clk的控制,认为采样到的是rst_n的低电平,继续初始化,下一个时钟周期才认为rst_n是高电平,输出响应的值。
但是采取同步复位的方式的虽然能减小亚稳态的发生,但是需要额外的资源。
异步复位和同步复位都有优缺点,将两者相互结合,互补一下,便出现了“异步复位,同步释放”的方式,很好的解决了两者的不足。代码和RTL图如下:
1 module sys_ctrl( 2 input clk, 3 input rst_n, 4 output reg sys_rst_n 5 ); 6 7 reg rst_1; 8 9 always@(posedge clk or negedge rst_n) 10 begin 11 if(!rst_n == 1'b0) 12 rst_1 <= 1'b0; 13 else 14 rst_1 <= 1'b1; 15 end 16 17 always@(posedge clk or negedge rst_n) 18 begin 19 if(rst_n == 1'b0) 20 sys_rst_n <= 1'b0; 21 else 22 sys_rst_n <= rst_1; 23 end 24 25 26 endmodule
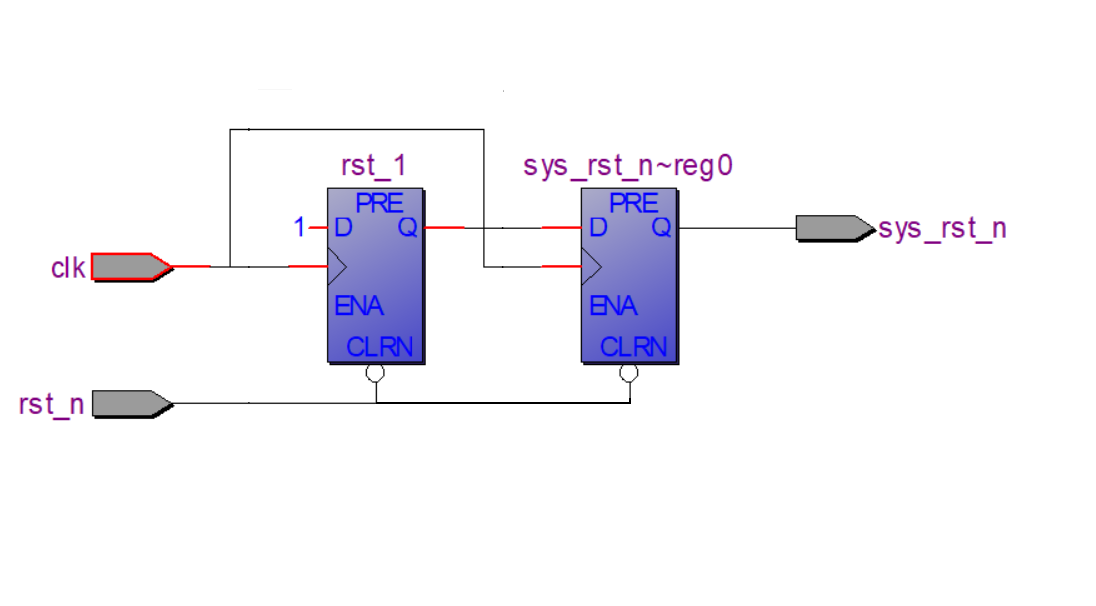
这样就既利用了异步复位的清零端进行复位,不需要额外开支资源,又利用了同步复位的释放优点,将异步复位的释放电平延迟1个时钟周期,然后再将延迟后的释放电平信号作为系统复位信号,避免了释放时亚稳态的发生。
下面说一下上电复位
系统在每次上电复位初始化时,需要消耗很多方面的时间,大体如下:
1. 电源等芯片的转换时间
2. FPGA的启动到稳定的时间
3. 外围电路的启动时间
所以,为了保证FPGA上电复位后更加的稳定,可以在上电开始后,进行一定的延迟时间来保证FPGA可以达到稳定的状态。综合以上代码如下:
1 module test( 2 input clk, 3 input rst_n, 4 output reg sys_rst_n 5 ); 6 7 parameter RST_TIME = 24'd2_500_000; //50ms 8 9 reg rst_1; 10 reg [23:0] cnt_rst; 11 12 always@(posedge clk or negedge rst_n) 13 begin 14 if(rst_n == 1'b0) 15 cnt_rst <= 24'd0; 16 else 17 if(cnt_rst < RST_TIME) 18 cnt_rst <= cnt_rst +1'b1; 19 else 20 cnt_rst <= cnt_rst; 21 end 22 23 always@(posedge clk or negedge rst_n) 24 begin 25 if(rst_n == 1'b0)begin 26 rst_1 <= 1'b0; 27 sys_rst_n <= 1'b0; 28 end 29 else begin 30 if(cnt_rst == RST_TIME)begin 31 rst_1 <= 1'b1; 32 sys_rst_n <= rst_1; 33 end 34 else begin 35 rst_1 <= 1'b0; 36 sys_rst_n <= 1'b0; 37 end 38 end 39 end 40 41 endmodule