周立功为CAN通信提供了动态库:官方提供了很多相关动态库和lib等,如图
 ,其中kerneldlls里还有很多动态库,还有一个配置文件。其实这么多的文件,如果我们只用到USBCAN2通信,只需要kerneldlls里面的usbcan.dll这个动态库,里面真正封装了用了windows和can模块通过usb通信的函数。然后还需要ControlCAN.h这个头文件,里面有对使用dll函数时一些结构体的声明和定义。对于ControlCAN.dll和ControlCAN.lib实际上是对使用usbcan.dll动态库的引导入口。
,其中kerneldlls里还有很多动态库,还有一个配置文件。其实这么多的文件,如果我们只用到USBCAN2通信,只需要kerneldlls里面的usbcan.dll这个动态库,里面真正封装了用了windows和can模块通过usb通信的函数。然后还需要ControlCAN.h这个头文件,里面有对使用dll函数时一些结构体的声明和定义。对于ControlCAN.dll和ControlCAN.lib实际上是对使用usbcan.dll动态库的引导入口。
对于如何使用Qt加载这些动态库来实现CAN通信,有两种方式,1是显式,2是隐式。
显式:通过代码加载动态库我们需要的函数,把这些函数实际放在自己的工程之中;
隐式:通过在工程中加入动态库入口的路径,使可执行文件在运行时在相应路径找动态库,再使用其函数。
一、显式
1、新建工程,在工程中(和源文件放在一起)添加ControlCAN.h头文件、usbcan.dll动态库。
ControlCAN.h是需要包含在工程中的(右键工程-》添加存在路径-》此时默认勾选好了ControlCAN.h,确认即可);usbcan.dll是需要加载的动态库
2、使用QLibrary加载动态库
QLibrary lib("usbcan.dll");
if(true == lib.load())
qDebug()<<"load ok";
3、声明一个自己的函数,功能与usbcan.dll里的函数的功能想对应
比如,usbcan.dll中有个打开设备的函数,那就自己定义一个打开设备的函数,把usbcan.dll中打开设备函数的功能赋值到自定义函数中--!
头文件中:
typedef DWORD(__stdcall VCI_OpenDevice)(DWORD,DWORD,DWORD);//不知道为什么,反正没有就会出错
typedef DWORD(__stdcall VCI_ResetCAN)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
typedef DWORD(__stdcall VCI_CloseDevice)(DWORD DeviceType,DWORD DeviceInd);
typedef DWORD(__stdcall VCI_InitCAN)(DWORD DeviceType, DWORD DeviceInd, DWORD CANInd, PVCI_INIT_CONFIG pInitConfig);
typedef DWORD(__stdcall VCI_StartCAN)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
typedef ULONG(__stdcall VCI_Transmit)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,PVCI_CAN_OBJ pSend,ULONG Len);
typedef ULONG(__stdcall VCI_Receive)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,PVCI_CAN_OBJ pReceive,ULONG Len,INT WaitTime/*=-1*/);
typedef ULONG(__stdcall VCI_GetReceiveNum)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
typedef DWORD(__stdcall VCI_ClearBuffer)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd);
typedef DWORD(__stdcall VCI_ReadErrInfo)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,PVCI_ERR_INFO pErrInfo);
typedef DWORD(__stdcall VCI_ReadCANStatus)(DWORD DeviceType,DWORD DeviceInd,DWORD CANInd,PVCI_CAN_STATUS pCANStatus);
以上函数全是can通信重要的函数,全部为自己定义的,名字随便取都可以。
4、使用上面的函数声明对应的函数对象
头文件中:
VCI_OpenDevice *pOpenDevice;
VCI_ResetCAN *pResetCAN;
VCI_CloseDevice *pCloseDevice;
VCI_InitCAN *pInitCAN;
VCI_StartCAN *pStartCAN;
VCI_Transmit *pTransmitCAN;
VCI_Receive *pReceive;
VCI_GetReceiveNum *pGetReceiveNum;
VCI_ClearBuffer *pClearBuffer;
VCI_ReadErrInfo *pReadErrInfoCAN;
VCI_ReadCANStatus *pVCI_ReadCANStatus;
5、引入usbcan.dll动态库
在源文件中:
QLibrary lib("usbcan.dll");
true == lib.load();
6、将usbcan.dll中的函数功能分解到自定义对应函数中
源文件中:
pOpenDevice = (VCI_OpenDevice *)lib.resolve("VCI_OpenDevice");
pCloseDevice = (VCI_CloseDevice *)lib.resolve("VCI_CloseDevice");
pInitCAN = (VCI_InitCAN *)lib.resolve("VCI_InitCAN");
pStartCAN = (VCI_StartCAN *)lib.resolve("VCI_StartCAN");
pTransmitCAN = (VCI_Transmit *)lib.resolve("VCI_Transmit");
pReceive = (VCI_Receive *)lib.resolve("VCI_Receive");
pGetReceiveNum = (VCI_GetReceiveNum *)lib.resolve("VCI_GetReceiveNum");
pClearBuffer = (VCI_ClearBuffer *)lib.resolve("VCI_ClearBuffer");
pReadErrInfoCAN = (VCI_ReadErrInfo*)lib.resolve("VCI_ReadErrInfo");
7、接下来就可以使用自定义的函数来进行CAN总线编程了
二、隐式
1、把ControlCAN.h和ControlCAN.lib放在工程目录下,和源文件放在一起
2、把kerneldlls文件夹(里面只需要放ini配置文件和usbcan.dll文件即可)和ControlCAN.dll和可执行文件放在一起
3、右键Qt工程,添加库->外部库,在库文件中找到ControlCAN.lib文件路径,不勾选Mac和linux,不勾选为debug版本添加d作为后缀
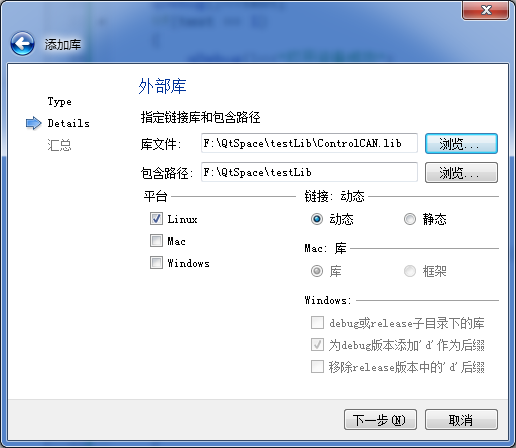
4、下一步,确定。此时已经把路径加进去了
5、右键工程,添加已经存在文件,此时已经默认勾选了ControlCAN.h,确定即可
PS:
1、周立功提供的动态库很多变量类型没有定义的,比如DWORD,可以再ControlCAN.h中
#include "windows.h"//windows
#include "windef.h"//linux
2、打开ControlCAN.h时会提醒编码不正确,选择system编码就行了
PS:
1、时间标识:CAN盒子接收到当前帧的时间,这个时间是CAN盒子启动的时间,最小单位是0.1ms,比较准
如何将时间标识转为字符串:
QString MyMethod::getTimeStampStr(UINT TimeStamp)
{
QString resultStr = "";
int hour = TimeStamp/36000000;
int minute = (TimeStamp - hour*36000000)/600000;
int second = (TimeStamp - hour*36000000 - minute*600000)/10000;
int ms = (TimeStamp - hour*36000000 - minute*600000 - second*10000)/10;
int mms = (TimeStamp - hour*36000000 - minute*600000 - second*10000 - ms*10);
resultStr = QString("%1:").arg(hour,2,10,QChar('0'));//时
resultStr += QString("%1:").arg(minute,2,10,QChar('0'));//分
resultStr += QString("%1:").arg(second,2,10,QChar('0'));//秒
resultStr += QString("%1:").arg(ms,3,10,QChar('0'));//毫秒
resultStr += QString::number(mms);//0.1ms
return resultStr;
}
2、如何高速CAN通信
根据我在项目中的实践,发现利用PC里能达到的最块CAN通信(使用USBCAN-2)速度是1ms,但是需要很多技巧。
①、使用3个线程类:1个用来接收,1个用来发送,1个用来解析
②、接收线程最好使用最高线程权限:QThread::HighestPriority,其他的用第二高权限(这个根据计算机性能来考虑)
③、如何循环发送报文:在发送线程里再多加一个定时器(这个定时器不是主界面的,而是发送线程的),定时器timeout时间为需要循环发送的时间(可达到1ms);
用户在主界面设置需要发送的报文为OBJ结构体数组,然后通过狗仔函数的方式传到发送线程,最后发送就行了。
④、解析过程:接收函数循环接收报文,每接收到n帧就发送到解析线程,然后根据ID解析,将解析数据发送主界面显示(显示的时候textedit不要滚动,即不要append,直接替换,否则会卡顿)
PS:
1、打开两路CAN:VCI_OpenDevice只能调用一次,并且需要在同一个软件中使用(dll只能调用一次)