官网

0 安装好桨叶
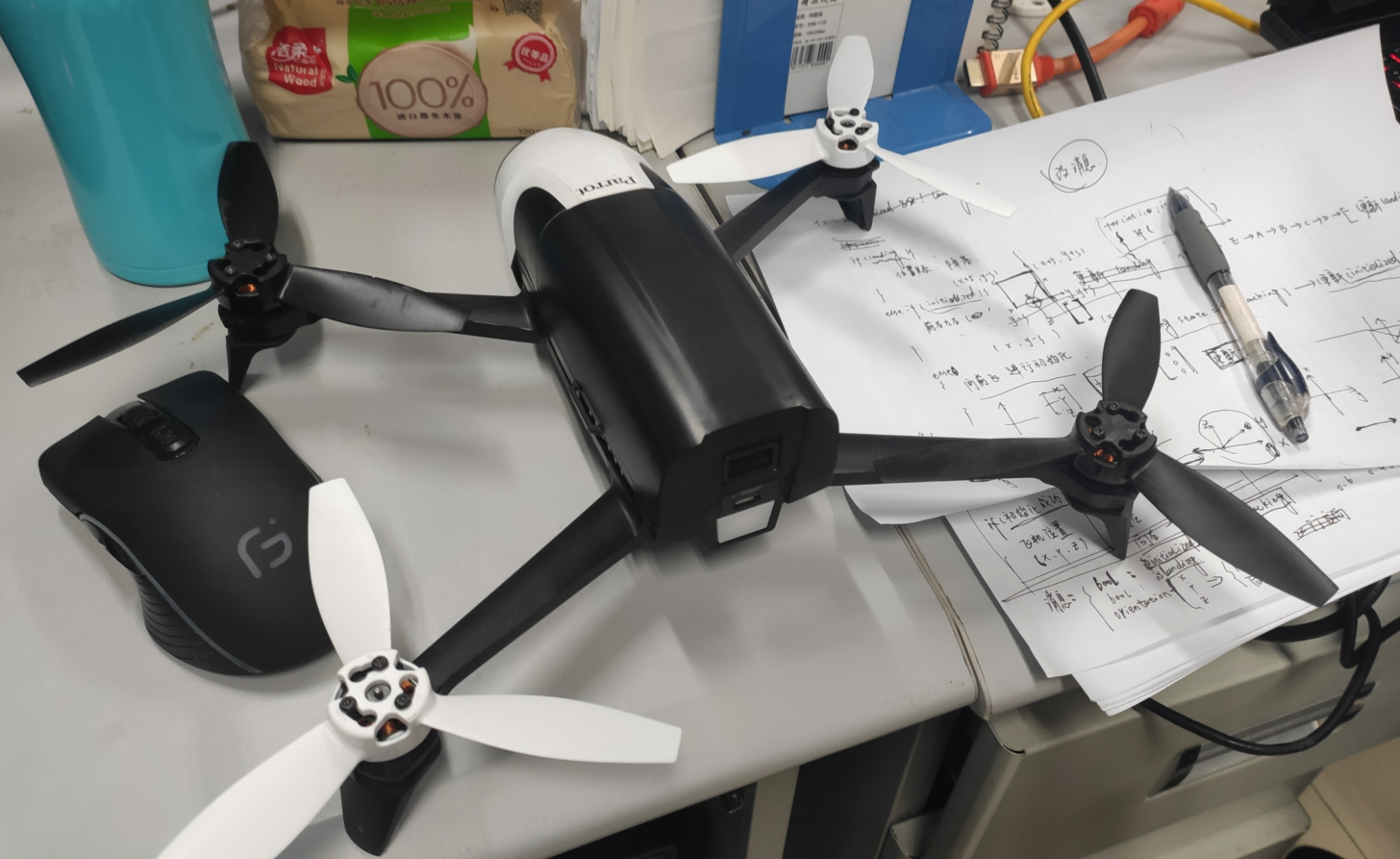
1手机APP测试
FreeFlight 6
http://www.parrot.com.cn/server2020/s20205/
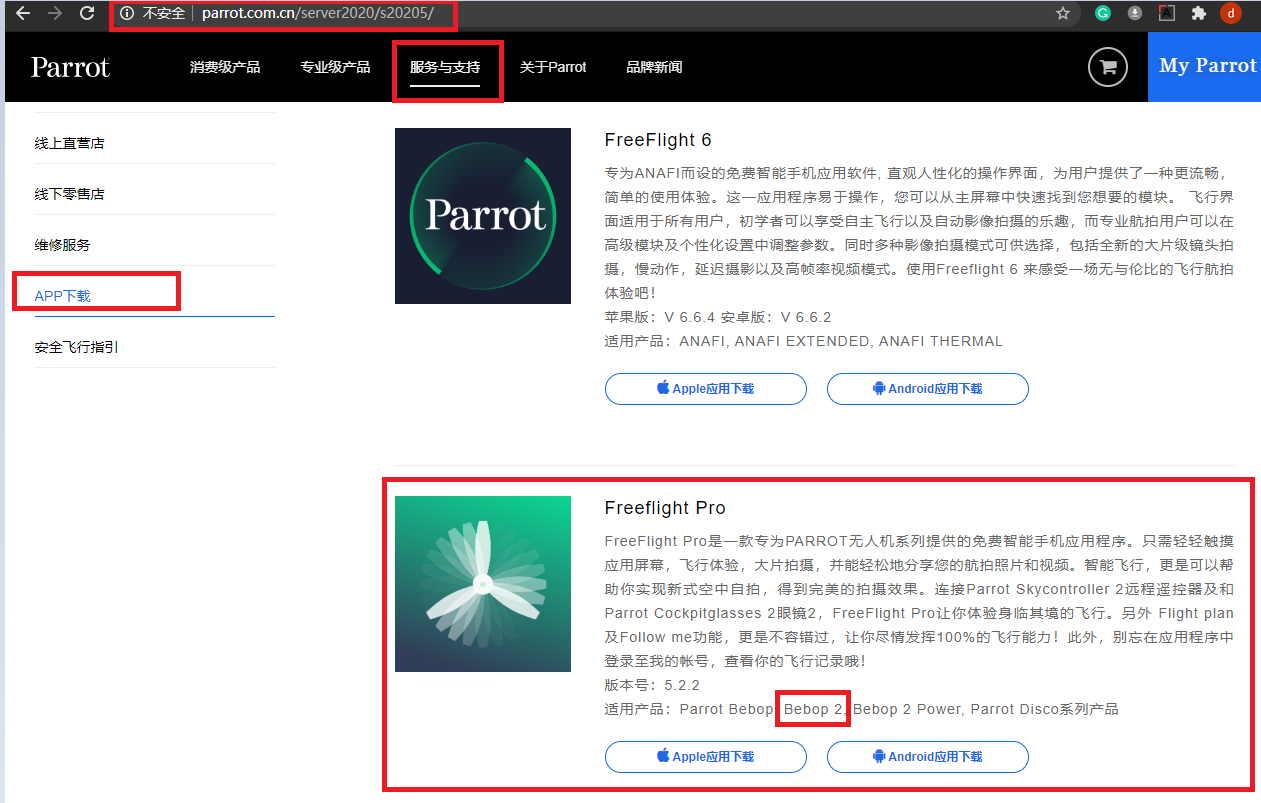
下载APP安装好
手机搜索无人机WIFI 连接Bebop2-xxxx连接设备
2 程序控制
ubuntu系统使用ros控制
源码sdk
程序开发网站
https://github.com/AutonomyLab/bebop_autonomy

编译过程
https://bebop-autonomy.readthedocs.io/en/latest/installation.html#compiling-from-source
前提条件:
- ROS Indigo,Jade或Kinetic(仅在Ubuntu上测试)
- Ubuntu的软件包:
build-esstential,python-rosdep,python-catkin-tools - 基本了解构建ROS软件包
sudo apt-get install build-essential python-rosdep python-catkin-tools
要从源代码进行编译,您需要在新的或现有的catkin工作空间中克隆源代码,用于rosdep安装依赖项,最后使用catkin编译工作空间。以下命令在新创建的catkin工作空间中演示此过程。
从0.6版Parrot ARSDK开始,bebop_autonomy的主要基础依赖 项不再内置内联。取而代之的是,在下面的步骤中,将它的稍微打补丁和类别化的版本parrot_arsdk作为依赖项获取。与以前的版本相比,这大大减少了软件包的编译时间(例如,从现代计算机上的约15分钟减少到不到一分钟)。如果要从源代码重新编译,则需要先清理工作区:。rosdep install$ catkin clean [-y]
$ mkdir -p ~/bebop_ws/src && cd ~/bebop_ws $ catkin init $ git clone https://github.com/AutonomyLab/bebop_autonomy.git src/bebop_autonomy # Update rosdep database and install dependencies (including parrot_arsdk) $ rosdep update $ rosdep install --from-paths src -i # Build the workspace $ catkin build
自己写的控制季节点
#-----------------------无人机控制过程--------------------------- ## 配置过程 ``` //编译 catkin_make //运行假设存放在~/Project/ROS/catkin_ws/ //第一个终端 - 开启 roscore //第二个终端-飞机的通信程序 source ~/Project/ROS/catkin_ws/devel/setup.bash roslaunch bebop_driver bebop_nodelet.launch //第三个终端-自己写的控制 source ~/Project/ROS/catkin_ws/devel/setup.bash rosrun bebop_control bebop_control_node ``` 模式选择 M 手动控制 N 自动控制 在窗口输入按键: WSAD前后左右 Q左旋转 E右侧旋转 J上 K下 T起飞 L降落 注意: 1飞机有飘的现象,或者说停止时候因为还惯性还会往前飞或者往左侧,需要往反方向控制下 2报错/usr/bin/ld: 找不到 -lIL 解决: sudo apt-get install libdevil1c2 libdevil-dev 3 每次运行需要 source工程路径,可以直接加入 gedit ~/.bashrc 最后一行输入 source ~/Project/ROS/catkin_ws/devel/setup.bash