https://medium.com/@andrew.chamberlain/the-linear-algebra-view-of-least-squares-regression-f67044b7f39b
线性回归是初学者学习的最重要的统计模型工具。然而,传统的教学方式使得我们很难理解到这个regression的本质。大多数课程聚焦在"计算"视图上,在这个计算视图中,regression关注于每个观察值和预测值之间差的平方和所形成的表达式,随后我们对这个表达式应用求导取0,最终算得各个系数的值。
大多数教科书诱导学生们关注在这个痛苦的计算过程上,随后依赖于类似R或者Stata的统计软件包上,这导致学生严重依赖于这些软件,而不会深入理解到底是怎么工作的,其本质是什么。。这往往是不真正理解数学的老师去教regression的常见方式。
在本文中,我将更优雅简单地演示LSR的本质,我把他称为"线性代数"视图。
问题导入
regression的终极目标是找到一个合适的model来拟合一系列观测值的集合。本例中,我搜集了一些工厂每天机器故障的次数,比如我已经获取了三个数据点(day, number of failure): (1,1),(2,2),(3,2)。
我们的目标是寻找到一个线性方程来拟合这三个点。我们相信存在一个数学映射,将"days"唯一映射为"failures",或者说:
以  的形式来映射
的形式来映射
这里b就是每天的机器故障数, x是day, C,D是线性变换的系数,这也是我们要寻找的未知数。
我们将已知的三个数据点代入线性方程,得到:
对于前两个点,model fit的非常好,但是第三个点却开始出现问题,也就是说我们已经意识到:这三个点并不在一条直线上,我们的model只能最大限度的近似它。
我们来看看如何以$Ax = b$的方式来表达我们的线性模型:
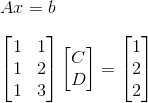
从这个矩阵中,我们可以说我们希望向量$vec{b}$存在于矩阵$A$的列空间$C(A)$中.也就是说,我们希望通过矩阵A的列向量做线性组合能够得到我们的观测值$b$列向量。
然而,不幸的是,我们已经知道$b$本身并不能完全由A的列向量线性表示。这意味着向量$b$并不在$A$的列空间中.所以我们并不能通过解线性方程组的方式来求解到$x(C,D)$.
我们来继续通过画图来了解发生着什么。
在下面的手绘中,矩阵A的列向量空间被记为$C(A)$。它为三维空间中的一个平面。如果我们将矩阵$A$的两个列向量记录为$a_1,a_2$,则列空间就是两个列向量所有线性组合构成的平面。
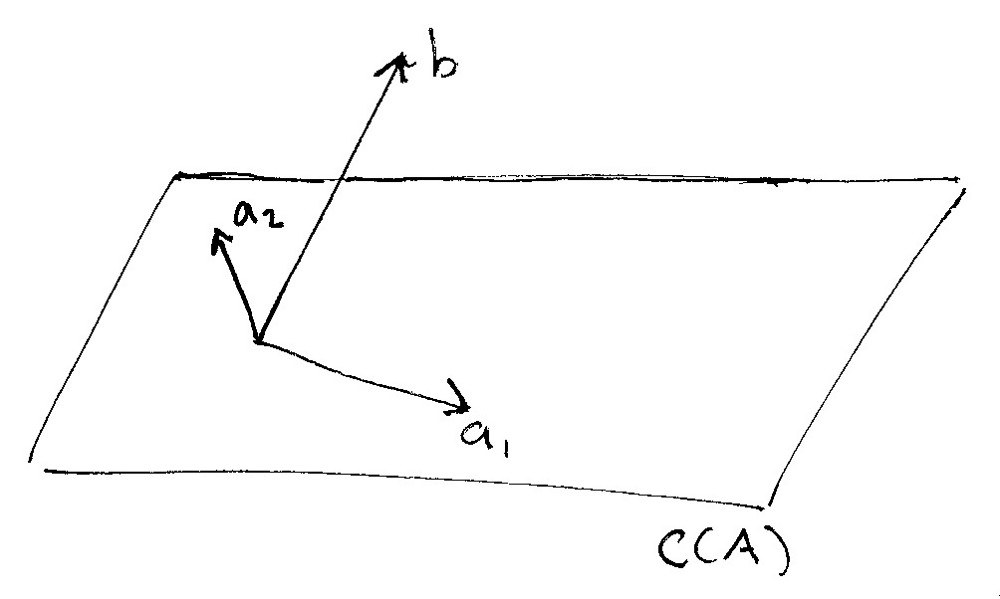
同时你可以看到观测值构成的列向量$b$并不存在于该平面中,而是和该平面有所交集,被标志为$b$。
平面$C(A)$是我们理想的数学模型,而向量$b$则是我们实际的观测值向量,并不能完美地落在线性空间$C(A)$中,那么我们需要怎么去做呢?
线性回归模型的方法是:我们应该放弃寻找一个model能够完美拟合到$b$,相反的是我们应该找到一个另外一个足够接近目标$b$向量的向量,而该向量能够在$A$的列空间中。也就是说我们需要在列空间中找到一个向量$p$,使得$p$和$a$越靠近越好。
下面的图片演示了这个过程。我们可以想象一下,如果从$C(A)$平面的正上方向下打一个光线,这将在$C(A)$上形成一个线段的影子。这实际上就是向量$b$在矩阵$A$的列空间平面上的投影projection.这个投影在图中我们以$p$标签来标识。
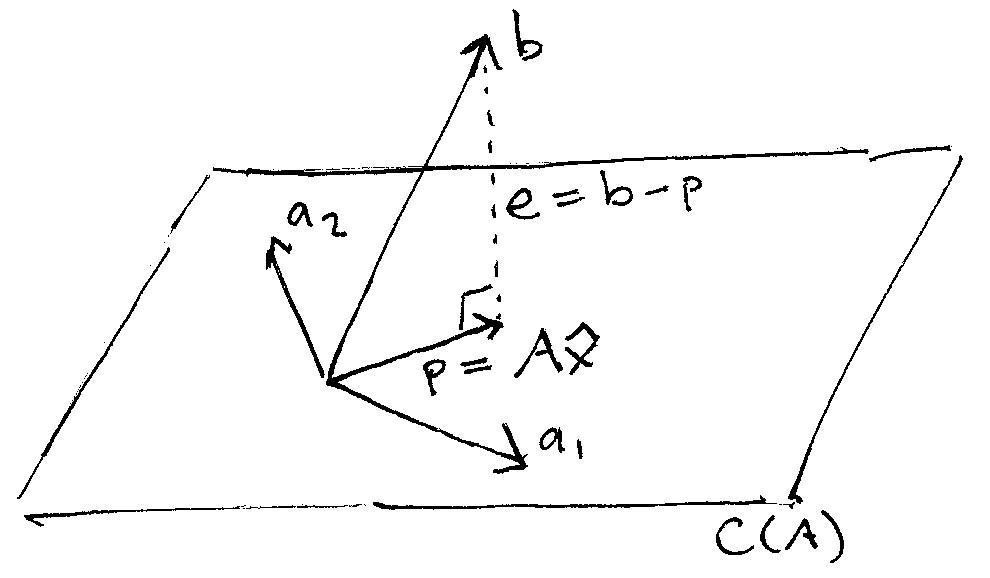
被标注为$e$的向量实际上是真值向量$b$和我们计划使用的投影向量$p(hat{b})$之间的。现在我们可以将我们的目标使用另外一种方式来描述:寻找一个合适的向量$p$使得$e$越小越好。也就是说,我们希望最小化$p,b$之间的误差。
在上面的图中,$e$就是观察值向量$b$减去投影向量$p$或者记为$b-p$.而投影向量$p$本身就是$A$的列向量线性组合----这也是为什么$p$能够在$A$的列空间中的原因----所以$p$应该等于$A$去乘以一个向量,我们记为$hat{x}$
为了最小化这个$e$,我们希望选择一个垂直于$e$但和$b$同向的向量$p$,在图中,$e$和$p$的夹角我们标注为90度的角。
求解Regression系数
既然e和A的列空间平面垂直,那么意味着$A$的列向量和$e$的点乘都为0(因为列空间的所有向量都和$e$垂直,而$A$的列向量必然在列空间里,故而),$Acdot e = 0,A^T imes e = 0$, 同时既然$e=b-p, p = A imes hat{x}$,我们就可以得到:
$$A^{T}(b-Ahat{x})=0$$
从上面方程中解出$hat{x}$,我们就得到:
$hat{x}$的每个元素就是计算出来的系数$C,D$,这正是我们要寻找的。做线性回归本质上就是在解方程:$Ax = b$,但是如果任何b中的观测值背离线性模型,那么A将不是可逆矩阵。因此我们通过在左右分别乘上矩阵$A$的转置矩阵$A^{T}$使得其为可逆矩阵。$A^{T}A$总是一个对称的方阵,所以是可逆的,然后我们就用它来求解$hat{x}$
使用这种代数视图还有其他的一些好处,其中之一:非常方便理解相关系数$r$.如果我們正規化x,y数据点,也就是说分别减去其均值,那么r就是$b,C(A)$的夹角的余弦值。
$cos()$函数值的范围是-1到1,就和r的值域一样。如果regression完全拟合,r=1,这意味着$b$在平面上。如果b在平面上,那么夹角是0,而$cos(0)=1$,相反,如果regression非常糟糕,r=0,而b和平面是垂直的,这时$cos(pi/2)=0$