我思考了一下上一个程序为什么会失败,可能还是太远了,所以这次弄近一点。把5000米改成1000米吧。。。其他的还是不变
function的持续不变,在这里就不重复写了,具体参照上一篇博客
主函数:关于亮点1
%================================================================================
clc;close all;clear all;
%参考:数字信号处理:page:59p;
%=============================================
% r=0;z=10;%发射信号的位置。
% r1=1000;z1=15;%1号亮点
% r2=1010;z2=15;%2号亮点
% r3=1050;z3=15;%3号亮点
% rr=0;zz=20:30;%接收信号
c = 1500; %声速 Unit:m/s
SNR = 60; %信噪比 Unit:dB H = 100; %水深 Unit:m
%Sample_time = 0.1; %采样时长 Unit:s 假设信号发射的时刻为零时刻
Re_coef_surf = -1; %水面反射系数
Re_coef_bottom = 0.8; %水底反射系数
Reflex_num =1; %考虑最大的反射次数
%=========================================
f0=1600; %信号频率 Unit:Hz
fs=16000; %采样率 Unit:Hz
T=5/f0; %信号脉宽 Unit:s %0.0031
ts=0:1/fs:T-1/fs; %一个脉冲包络的持续时间序列
Ns=length(ts); %50
startt=0.5;endt=3.5;%混响持续时间
Sample_time=endt;
azm=pi/6;
%============================亮点1===========================================
%第一过程:发射换能器到亮点1 % r=0;z=10;%发射信号的位置。
H1 = 10; %发射点水深 Unit:m
H2 = 15; %接收点水深 Unit:m
D = 1000; %接收与发射水平距离 Unit:m
%============================================================================
signal_11=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
signal_11_fft=fft(signal_11);
X1=abs(fft(signal_11));
X1=X1/max(X1);
%画图
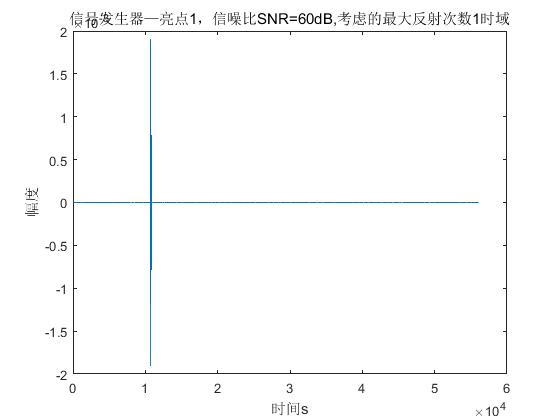
figure(1);
plot(signal_11);
xlabel('时间s');ylabel('幅度');
string = ['信号发生器—亮点1,信噪比SNR=',num2str(SNR),'dB,考虑的最大反射次数',num2str(Reflex_num),'时域'];title(string);
%---------------------------------------------------------------------------------------------------------------
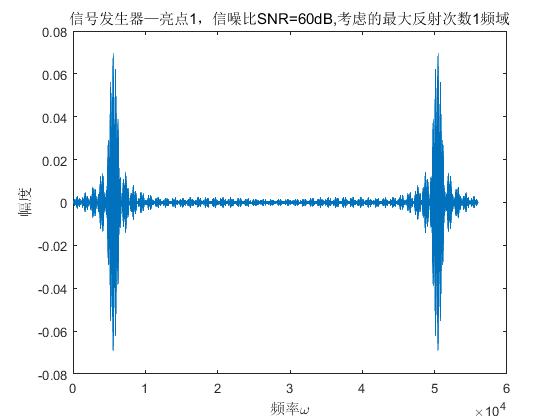
figure(2);
plot(1:length(signal_11_fft),signal_11_fft);
xlabel('频率omega');ylabel('幅度');
string = ['信号发生器—亮点1,信噪比SNR=',num2str(SNR),'dB,考虑的最大反射次数',num2str(Reflex_num),'频域'];title(string);
%--------------------------------------------------------------------------------------------------------------
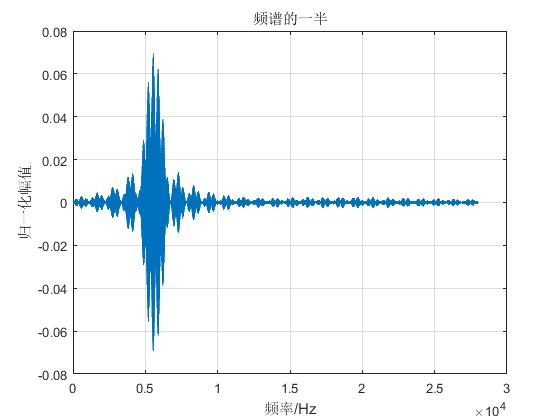
figure(3);
N=length(signal_11);
f=1:N/2;
plot(f,signal_11_fft(1:N/2));
xlabel('频率/Hz');ylabel('归一化幅值');title('频谱的一半');grid on;
%==========================================================
%过程2:从亮点散射
Np=(endt-startt)*fs; %散射系数的点数48000个点,发射信号持续时间内采样的点
for th=startt:1/fs:endt-1/fs %混响时间 Np48000个点,th共循环48000次
r1=c*(th-T)/2; %T=0.005
r2=c*th/2; %c=1500
N=round((r2^2-r1^2)*azm/2); %azm=0.5236(pi/6)方位角 %随着混响时间的增加,混响点数也在增加
ain=randn(1,N); %幅度
fai=randn(1,N)*2*pi; %相位
for i=1:N
p1(i)=ain(i)*exp(1i*fai(i));
end
P1(round((th-startt)*fs)+1)=sum(p1)/r1^2; %48000
end
% 得到混响信号
R1=conv(signal_11,P1); % length(signal_11)+length(P1)-1; 56000+48000-1=103999
Rr1=real(R1);
%====================================================================
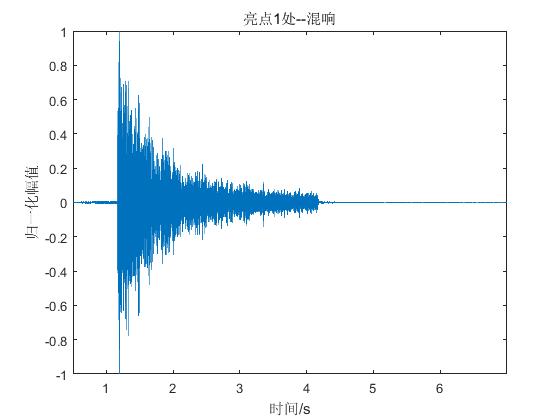
figure(4);
t=startt:1/fs:endt+1240*T-6002/fs; %: 共103999个点,这个是凑出来的
plot(t,Rr1/max(Rr1));
axis([startt endt+1240*T-6002/fs -1 1]);xlabel('时间/s');ylabel('归一化幅值');title('亮点1处--混响');
%---------------------------------------------------------------------------------------------------------------------------
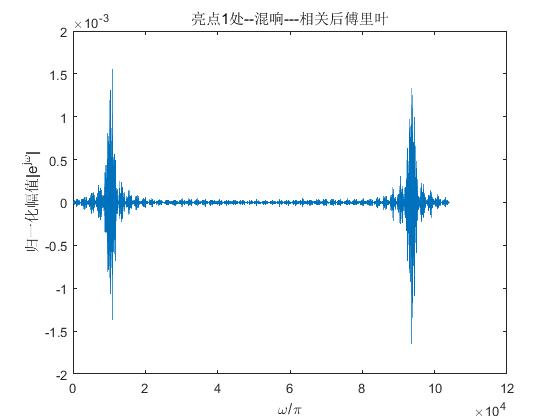
figure(5);
R1_fft=fft(R1);
plot(1:length(R1_fft),R1_fft);
xlabel('omega/pi');ylabel('归一化幅值|e^j^omega|');title('亮点1处--混响---相关后傅里叶');
%-------------------------------------------------------------------------------------------------------------------------
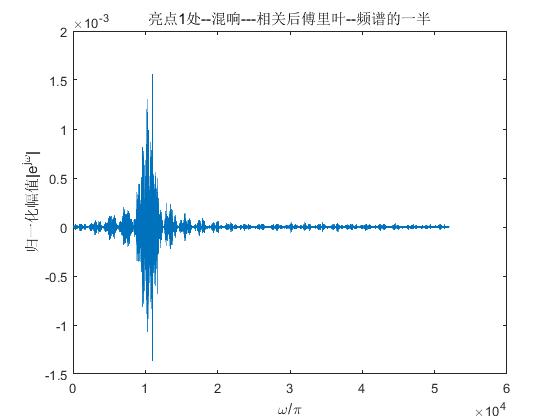
figure(6);
R1_fft=fft(R1);
plot(1:length(R1_fft)/2,R1_fft(1:length(R1_fft)/2));
xlabel('omega/pi');ylabel('归一化幅值|e^j^omega|');title('亮点1处--混响---相关后傅里叶--频谱的一半');
%=================================================================================
%重新思考第三过程: %选取阵列第一个点为参考点,zz=20。zz=20:30,rr=0; %亮点1散射后到达阵列1 r1=5000;z1=15;%1号亮点 rr=0;zz=20:30;%接收信号
H1 = 15; %发射点水深 Unit:m
D = 1000; %接收与发射水平距离 Unit:m
for kkk=1:10; %接收点水深 Unit:m
H2=20+1*kkk;
signal_13(kkk,:)=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
end
for kkk=1:10
zhenlie_1(kkk,:)=conv(signal_13(kkk,:),R1);
end
total_1=zhenlie_1(1,:);
for kkk=2:10
total_1=zhenlie_1(kkk,:)+total_1;
end
%==========================================================
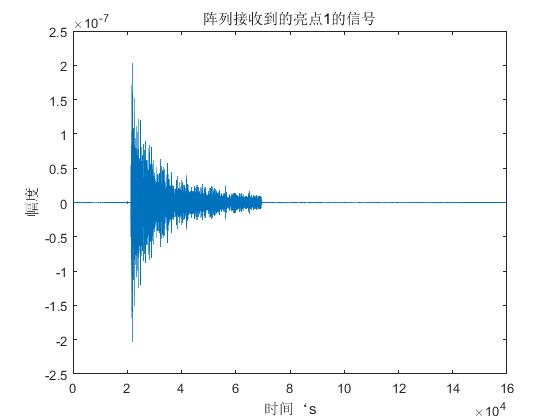
figure(7);
plot(1:length(total_1),total_1);
xlabel('时间‘s');ylabel('幅度');title('阵列接收到的亮点1的信号');
% =========================================
c = 1500; %声速 Unit:m/s
D=1; %阵元的距离
M = 10; % 阵元数
m=[0:M-1]; %阵元序号
d=0.2; %系统实孔径0.2
T=5/f0; %信号脉宽 Unit:s %0.0031
k=d/(c*T);
doa=atan(5/1000); %doa为线阵法线方向与声源的夹角
w = exp(j*2*pi*k*m'*sin(doa*pi/180)); %每个阵元的时延tow=k*m‘*sin()不同
temp=zeros(M,length(total_1));
for kkk=1:10
temp(kkk,1)=w(kkk,1);
end
ww=temp*total_1';
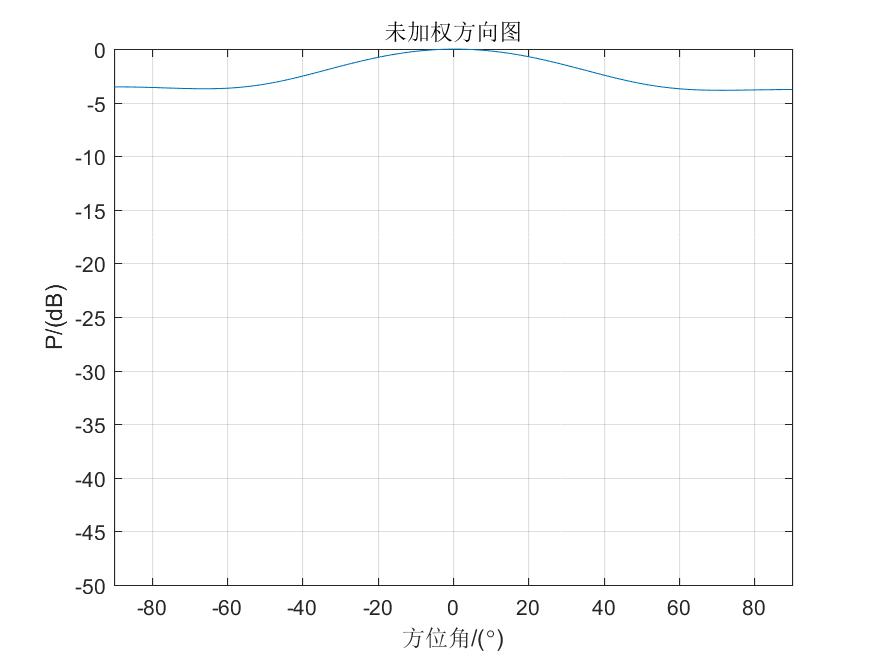
theta = linspace(-90,90,360); % 扫描方位角 a = exp(-j*2*pi*k*m'*sin(theta*pi/180)); %theta是扫描角度% 导向适量
Y = abs(ww'*a); Y = 20*log10(Y/max(Y)); Y_max=max(Y);
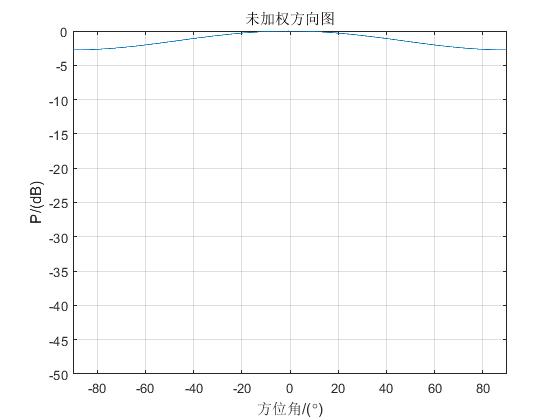
figure(8);
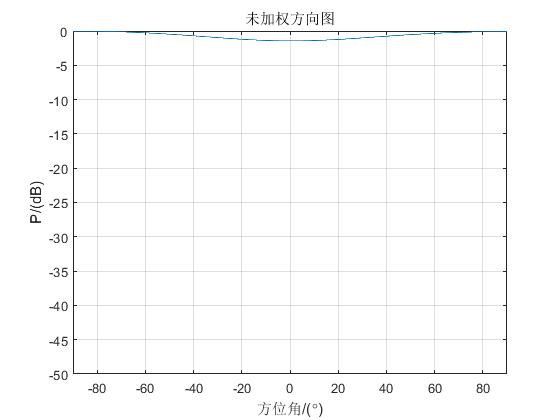
plot(theta,Y);
title('未加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%=============================================================
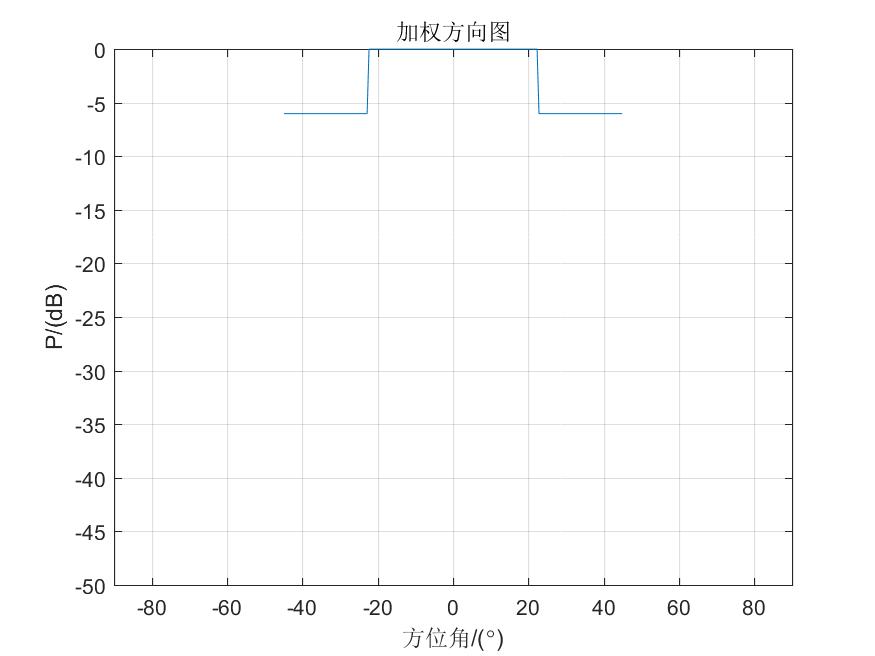
%加权
quanzhi=[zeros(1,90) 0.5*ones(1,45) 1*ones(1,90) 0.5*ones(1,45) zeros(1,90)];
tempp=zeros(360,360);
for kkk=1:360
tempp(1,kkk)=quanzhi(1,kkk);
end
YY = abs(Y*tempp);
YY = 20*log10(YY/max(YY));
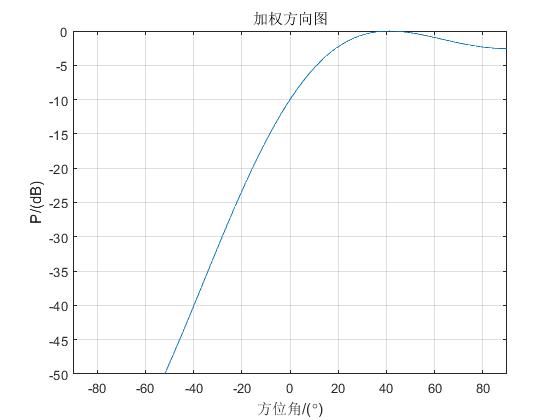
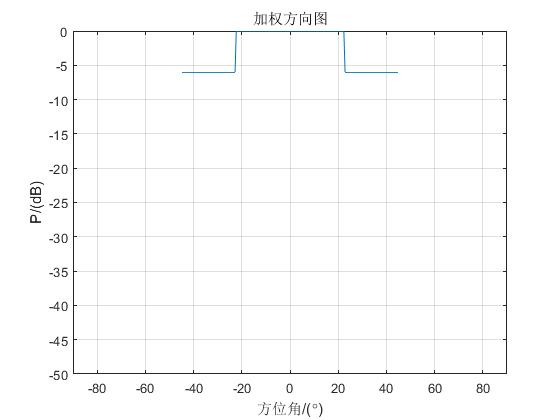
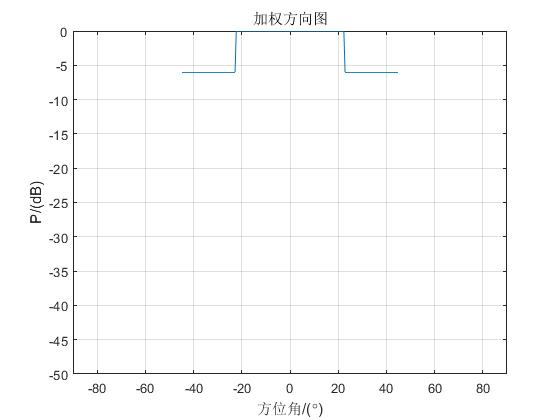
figure(9);
plot(theta,YY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%============================================================================
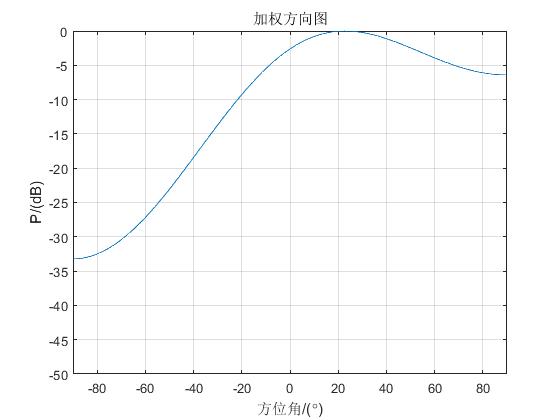
YYY=2.^(3*Y);
YYY = 20*log10(YYY/max(YYY));
YYY_max=max(YYY);
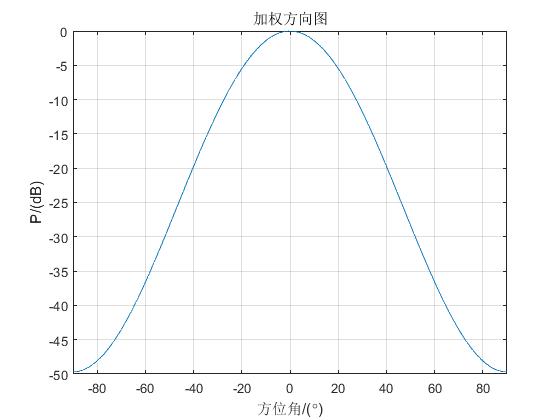
figure(10);
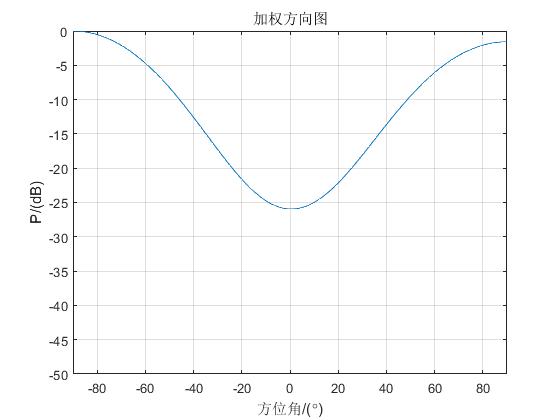
plot(theta,YYY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%=================================================================
最后运行其他两个亮点的程序,得到:

还是分不开。。。。。。。。。。。。。。。。。。。。。。。。。。
%=============================================================
%程序已结束===========================================
%感觉有错误,我重新思考下=========================================
我重新改了一下阵列处理那块,还是按5000m来处理,前面两个过程的程序没有改变,贴上第三个过程的程序:
%这次改进的是阵列与散射信号的运算过程,原来是相乘,我改成了卷积。
%bishe16的基础上进行修改
%=================================================================================
%重新思考第三过程:
%选取阵列第一个点为参考点,zz=20。zz=20:30,rr=0;
%亮点1散射后到达阵列1 r1=5000;z1=15;%1号亮点 rr=0;zz=20:30;%接收信号
H1 = 15; %发射点水深 Unit:m
D = 5000; %接收与发射水平距离 Unit:m
for kkk=1:10; %接收点水深 Unit:m
H2=20+1*kkk;
signal_13(kkk,:)=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
end
for kkk=1:10
zhenlie_1(kkk,:)=conv(signal_13(kkk,:),R1);
end
total_1=zhenlie_1(1,:);
for kkk=2:10
total_1=zhenlie_1(kkk,:)+total_1; %1x159998
end
figure(7);
plot(1:length(total_1),total_1);
xlabel('时间‘s');ylabel('幅度');title('阵列接收到的亮点1的信号');
% =========================================
c = 1500; %声速 Unit:m/s
D=1; %阵元的距离 M = 10; % 阵元数
m=[0:M-1]; %阵元序号
d=0.2; %系统实孔径0.2
T=5/f0; %信号脉宽 Unit:s %0.0031
k=d/(c*T);
doa=atan(5/5000); %doa为线阵法线方向与声源的夹角
w = exp(j*2*pi*k*m'*sin(doa*pi/180)); %每个阵元的时延tow=k*m‘*sin()不同
theta = linspace(-90,90,360);
% 扫描方位角
a = exp(-j*2*pi*k*m'*sin(theta*pi/180));%theta是扫描角度% 导向适量 10x360矩阵 a=a'; %360x10矩阵 %360x10矩阵
temp=zeros(length(theta),length(ww)); %360x160007juzhen
for kkk=1:10
temp(:,kkk)=a(:,kkk);
end
temp=temp';
Y = abs(ww*temp); %1x160007 *160007x360
Y = 20*log10(Y/max(Y));
Y_max=max(Y);
figure(8);
plot(theta,Y);
title('未加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');

%=============================================================
%加权
quanzhi=[zeros(1,90) 0.5*ones(1,45) 1*ones(1,90) 0.5*ones(1,45) zeros(1,90)];
tempp=zeros(360,360); for kkk=1:360
tempp(1,kkk)=quanzhi(1,kkk); end YY = abs(Y*tempp);
YY = 20*log10(YY/max(YY));
figure(9);
plot(theta,YY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%============================================================================
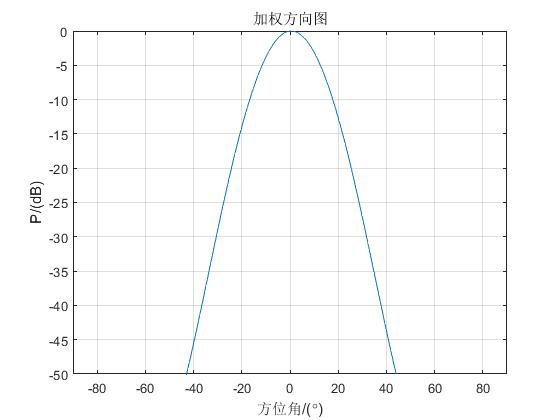
YYY=2.^(3*Y); YYY = 20*log10(YYY/max(YYY)); YYY_max=max(YYY);
figure(10);
plot(theta,YYY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
这肯定是不对的。。。。。。。。。。。。。。。。。。。。。。。。。
%===================================================
%距离5000改成1000m
%我思考了一下,为什么非要得到一个角度,来和得到的信号进行运算?我得到的信号不是自带角度了吗
%再改进一下
%=================================================================================
%重新思考第三过程: %选取阵列第一个点为参考点,zz=20。zz=20:30,rr=0; %亮点1散射后到达阵列1 r1=5000;z1=15;%1号亮点 rr=0;zz=20:30;%接收信号
H1 = 15; %发射点水深 Unit:m
D = 1000; %接收与发射水平距离 Unit:m
for kkk=1:10; %接收点水深 Unit:m
H2=20+1*kkk;
signal_13(kkk,:)=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
end
for kkk=1:10
zhenlie_1(kkk,:)=conv(signal_13(kkk,:),R1);
end
total_1=zhenlie_1(1,:);
for kkk=2:10
total_1=zhenlie_1(kkk,:)+total_1;
end
figure(7);
plot(1:length(total_1),total_1);
xlabel('时间‘s');ylabel('幅度');title('阵列接收到的亮点1的信号');
% =========================================
c = 1500; %声速 Unit:m/s
D=1; %阵元的距离
M = 10; % 阵元数 m=[0:M-1]; %阵元序号
d=0.2; %系统实孔径0.2
T=5/f0; %信号脉宽 Unit:s %0.0031
k=d/(c*T);
%zhenlie_1是10个阵元分别接受到的信号,10*159998的矩阵 %total_1是10个阵元的信号全部加在了一起 %先用zhenlie_1来处理程序看看结果
theta = linspace(-90,90,360); % 扫描方位角
a = exp(-j*2*pi*k*m'*sin(theta*pi/180)); %theta是扫描角度% 导向适量 10x360
zhenlie_1=zhenlie_1'; %159998x10矩阵
Y = abs(zhenlie_1*a); %159998x360 %Y得加成1x360的矩阵
temp=Y(1,:);
for kkk=2:length(total_1);
temp=Y(kkk,:)+temp;
end
Y=temp;
Y = 20*log10(Y/max(Y));
Y_max=max(Y);
figure(8);
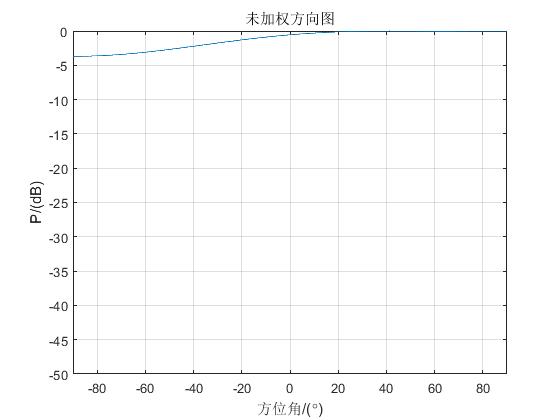
plot(theta,Y);
title('未加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%=============================================================
%加权
quanzhi=[zeros(1,90) 0.5*ones(1,45) 1*ones(1,90) 0.5*ones(1,45) zeros(1,90)];
tempp=zeros(360,360); for kkk=1:360
tempp(1,kkk)=quanzhi(1,kkk);
end
YY = abs(Y*tempp);
YY = 20*log10(YY/max(YY));
figure(9);
plot(theta,YY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%============================================================================
YYY=2.^(3*Y);
YYY = 20*log10(YYY/max(YYY));
YYY_max=max(YYY);
figure(10);
plot(theta,YYY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
Y_max=0,所以这个思路可能也是错的,所以我把距离改更小,100m来试验一下是程序的原因还是距离太远的原因。
%============================================================================================
clc;close all;clear all; %参考:数字信号处理:page:59p;
%=============================================
% r=0;z=10;%发射信号的位置。 % r1=100;z1=15;%1号亮点% r2=110;z2=15;%2号亮点% r3=150;z3=15;%3号亮点 % rr=0;zz=20:30;%接收信号
c = 1500; %声速 Unit:m/s
SNR = 60; %信噪比 Unit:dB
H = 100; %水深 Unit:m
%Sample_time = 0.1; %采样时长 Unit:s 假设信号发射的时刻为零时刻
Re_coef_surf = -1; %水面反射系数
Re_coef_bottom = 0.8; %水底反射系数
Reflex_num =1; %考虑最大的反射次数
%=========================================
f0=1600; %信号频率 Unit:Hz
fs=16000; %采样率 Unit:Hz
T=5/f0; %信号脉宽 Unit:s %0.0031
ts=0:1/fs:T-1/fs; %一个脉冲包络的持续时间序列 Ns=length(ts); %50
startt=0.5;endt=3.5;%混响持续时间
Sample_time=endt;
azm=pi/6;
%============================亮点1===========================================
%第一过程:发射换能器到亮点1 % r=0;z=10;%发射信号的位置。
H1 = 10; %发射点水深 Unit:m
H2 = 15; %接收点水深 Unit:m
D = 100; %接收与发射水平距离 Unit:m
%============================================================================
signal_11=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
signal_11_fft=fft(signal_11);
X1=abs(fft(signal_11));
X1=X1/max(X1); %画图
figure(1);
plot(signal_11);
xlabel('时间s');ylabel('幅度'); string = ['信号发生器—亮点1,信噪比SNR=',num2str(SNR),'dB,考虑的最大反射次数',num2str(Reflex_num),'时域'];title(string);
figure(2);
plot(1:length(signal_11_fft),signal_11_fft);
xlabel('频率omega');ylabel('幅度'); string = ['信号发生器—亮点1,信噪比SNR=',num2str(SNR),'dB,考虑的最大反射次数',num2str(Reflex_num),'频域'];title(string);
figure(3);
N=length(signal_11); f=1:N/2;
plot(f,signal_11_fft(1:N/2)); xlabel('频率/Hz');ylabel('归一化幅值');title('频谱的一半');grid on;
%==========================================================
%过程2:从亮点散射
Np=(endt-startt)*fs; %散射系数的点数48000个点,发射信号持续时间内采样的点 for th=startt:1/fs:endt-1/fs %混响时间 Np48000个点,th共循环48000次
r1=c*(th-T)/2; %T=0.005
r2=c*th/2; %c=1500
N=round((r2^2-r1^2)*azm/2); %azm=0.5236(pi/6)方位角 %随着混响时间的增加,混响点数也在增加
ain=randn(1,N); %幅度
fai=randn(1,N)*2*pi; %相位
for i=1:N
p1(i)=ain(i)*exp(1i*fai(i));
end
P1(round((th-startt)*fs)+1)=sum(p1)/r1^2; %48000
end
% 得到混响信号
R1=conv(signal_11,P1); % length(signal_11)+length(P1)-1; 56000+48000-1=103999
Rr1=real(R1);
%====================================================================
figure(4);
t=startt:1/fs:endt+1240*T-6002/fs; %: 共103999个点,这个是凑出来的
plot(t,Rr1/max(Rr1));
axis([startt endt+1240*T-6002/fs -1 1]);xlabel('时间/s');ylabel('归一化幅值');title('亮点1处--混响');
figure(5);
R1_fft=fft(R1);
plot(1:length(R1_fft),R1_fft);
xlabel('omega/pi');ylabel('归一化幅值|e^j^omega|');title('亮点1处--混响---相关后傅里叶');
figure(6);
R1_fft=fft(R1);
plot(1:length(R1_fft)/2,R1_fft(1:length(R1_fft)/2)); xlabel('omega/pi');ylabel('归一化幅值|e^j^omega|');title('亮点1处--混响---相关后傅里叶--频谱的一半');
%=================================================================================
%重新思考第三过程:
%选取阵列第一个点为参考点,zz=20。zz=20:30,rr=0; %亮点1散射后到达阵列1 r1=5000;z1=15;%1号亮点 rr=0;zz=20:30;%接收信号
H1 = 15; %发射点水深 Unit:m
D = 100; %接收与发射水平距离 Unit:m
for kkk=1:10; %接收点水深 Unit:m
H2=20+1*kkk;
signal_13(kkk,:)=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
end
for kkk=1:10
zhenlie_1(kkk,:)=conv(signal_13(kkk,:),R1);
end
total_1=zhenlie_1(1,:);
for kkk=2:10
total_1=zhenlie_1(kkk,:)+total_1;
end
figure(7);
plot(1:length(total_1),total_1);
xlabel('时间‘s');ylabel('幅度');title('阵列接收到的亮点1的信号');
% =========================================
c = 1500; %声速 Unit:m/s
D=1; %阵元的距离
M = 10; % 阵元数
m=[0:M-1]; %阵元序号
d=0.2; %系统实孔径0.2
T=5/f0; %信号脉宽 Unit:s %0.0031
k=d/(c*T);
%zhenlie_1是10个阵元分别接受到的信号,10*159998的矩阵
%total_1是10个阵元的信号全部加在了一起
%先用zhenlie_1来处理程序看看结果
theta = linspace(-90,90,360); % 扫描方位角
a = exp(-j*2*pi*k*m'*sin(theta*pi/180)); %theta是扫描角度% 导向适量 10x360
zhenlie_1=zhenlie_1'; %159998x10矩阵
Y = abs(zhenlie_1*a); %159998x360 %Y得加成1x360的矩阵
temp=Y(1,:);
for kkk=2:length(total_1);
temp=Y(kkk,:)+temp;
end
Y=temp;
Y = 20*log10(Y/max(Y));
Y_max=max(Y);
figure(8);
plot(theta,Y);
title('未加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%=============================================================
%加权
quanzhi=[zeros(1,90) 0.5*ones(1,45) 1*ones(1,90) 0.5*ones(1,45) zeros(1,90)];
tempp=zeros(360,360);
for kkk=1:360
tempp(1,kkk)=quanzhi(1,kkk);
end
YY = abs(Y*tempp);
YY = 20*log10(YY/max(YY));
figure(9);
plot(theta,YY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%============================================================================
YYY=2.^(3*Y);
YYY = 20*log10(YYY/max(YYY));
YYY_max=max(YYY);
figure(10);
plot(theta,YYY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
所以说这个思路还是错的。。。。。。。。。。。。。。。。。。。
%===================================================================
%接下来那直接把阵列信号全部加在一起,再进行处理
%m=100米;
%=================================================================================
%重新思考第三过程: %选取阵列第一个点为参考点,zz=20。zz=20:30,rr=0; %亮点1散射后到达阵列1 r1=5000;z1=15;%1号亮点 rr=0;zz=20:30;%接收信号
H1 = 15; %发射点水深 Unit:m
D = 100; %接收与发射水平距离 Unit:m
for kkk=1:10; %接收点水深 Unit:m
H2=20+1*kkk;
signal_13(kkk,:)=Com_Sonar_data_generation_2(c,fs,f0,T,Sample_time,SNR,H,H1,H2,D,Re_coef_surf,Re_coef_bottom,Reflex_num);
end
for kkk=1:10
zhenlie_1(kkk,:)=conv(signal_13(kkk,:),R1);
end
total_1=zhenlie_1(1,:);
for kkk=2:10
total_1=zhenlie_1(kkk,:)+total_1;
end
figure(7);
plot(1:length(total_1),total_1);
xlabel('时间‘s');ylabel('幅度');title('阵列接收到的亮点1的信号');
% =========================================
c = 1500; %声速 Unit:m/s
D=1; %阵元的距离 M = 10; % 阵元数
m=[0:M-1]; %阵元序号
d=0.2; %系统实孔径0.2
T=5/f0; %信号脉宽 Unit:s %0.0031
k=d/(c*T);
%zhenlie_1是10个阵元分别接受到的信号,10*159998的矩阵
%total_1是10个阵元的信号全部加在了一起
%用total_1来处理
theta = linspace(-90,90,360); % 扫描方位角
a = exp(-j*2*pi*k*m'*sin(theta*pi/180)); %theta是扫描角度% 导向适量 10x360
total_1=total_1'; %1x159998矩阵
temp=zeros(length(total_1),length(theta)); %159998x360
for kkk=1:10
temp(kkk,:)=a(kkk,:);
end
Y = abs(total_1'*temp); %1x159998 *159998x360
Y = 20*log10(Y/max(Y));
Y_max=max(Y);
figure(8);
plot(theta,Y);
title('未加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%=============================================================
%加权
quanzhi=[zeros(1,90) 0.5*ones(1,45) 1*ones(1,90) 0.5*ones(1,45) zeros(1,90)];
tempp=zeros(360,360);
for kkk=1:360
tempp(1,kkk)=quanzhi(1,kkk);
end
YY = abs(Y*tempp);
YY = 20*log10(YY/max(YY));
figure(9);
plot(theta,YY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');
%============================================================================
YYY=2.^(3*Y);
YYY = 20*log10(YYY/max(YYY));
YYY_max=max(YYY);
figure(10);
plot(theta,YYY);
title('加权方向图'); axis([-90,90,-50,0]); grid on; xlabel('方位角/(circ)');ylabel( 'P/(dB)');