1.背景
1.1.范围
MODBUS 是 OSI 模型第 7 层上的应用层报文传输协议, 它在连接至不同类型总线或网络的设备之间提供客户机/服务器通信。
自从 1979 年出现工业串行链路的事实标准以来, MODBUS 使成千上万的自动化设备能够通信。
目前,继续增加对简单而雅观的 MODBUS 结构支持。互联网组织能够使 TCP/IP 栈上的保留系统端口 502 访问 MODBUS。
MODBUS 是一个请求/应答协议,并且提供功能码规定的服务。MODBUS 功能码是 MODBUS请求/应答 PDU 的元素。
1.2.缩略语
ADU 应用数据单元
HDLC 高级数据链路控制
HMI 人机界面
IETF 因特网工程工作组
I/O 输入/输出设备
IP 互连网协议
MAC 介质访问控制
MB MODBUS 协议
MBAP MODBUS应用协议
PDU 协议数据单元
PLC 可编程逻辑控制器
TCP 传输控制协议
1.3.MODBUS体系结构实例
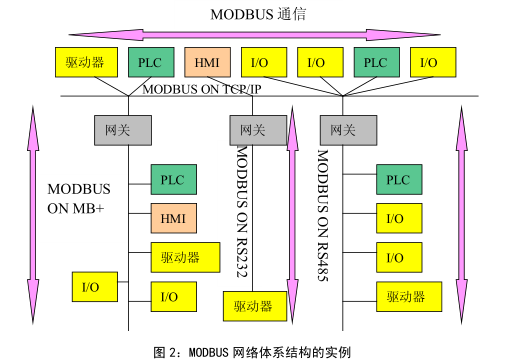
每种设备(PLC、HMI、控制面板、驱动程序、动作控制、输入/输出设备)都能使用 MODBUS协议来启动远程操作。
在基于串行链路和以太 TCP/IP 网络的 MODBUS 上可以进行相同通信。
一些网关允许在几种使用 MODBUS 协议的总线或网络之间进行通信。
1.4.协议描述
MODBUS 协议定义了一个与基础通信层无关的简单协议数据单元(PDU) 。特定总线或网络上的 MODBUS 协议映射能够在应用数据单元(ADU)上引入一些附加域。
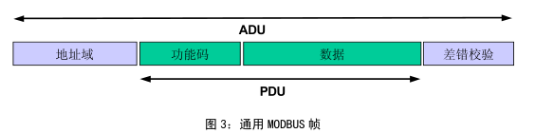
启动 MODBUS 事务处理的客户机创建 MODBUS 应用数据单元。 功能码向服务器指示将执行哪种操作。
MODBUS 协议建立了客户机启动的请求格式。
用一个字节编码 MODBUS 数据单元的功能码域。有效的码字范围是十进制 1-255(128-255 为异常响应保留) 。当从客户机向服务器设备发送报文时,功能码域通知服务器执行哪种操作。
向一些功能码加入子功能码来定义多项操作。
从客户机向服务器设备发送的报文数据域包括附加信息,服务器使用这个信息执行功能码定义的操作。这个域还包括离散项目和寄存器地址、处理的项目数量以及域中的实际数据字节数。
在某种请求中,数据域可以是不存在的(0 长度) ,在此情况下服务器不需要任何附加信息。功能码仅说明操作。
如果在一个正确接收的 MODBUS ADU 中,不出现与请求 MODBUS 功能有关的差错,那么服务器至客户机的响应数据域包括请求数据。如果出现与请求 MODBUS 功能有关的差错,那么域包括一个异常码,服务器应用能够使用这个域确定下一个执行的操作。
例如, 客户机能够读一组离散量输出或输入的开/关状态, 或者客户机能够读/写一组寄存器的数据内容。
当服务器对客户机响应时,它使用功能码域来指示正常(无差错)响应或者出现某种差错(称为异常响应) 。对于一个正常响应来说,服务器仅对原始功能码响应。

对于异常响应,服务器返回一个与原始功能码等同的码,设置该原始功能码的最高有效位为逻辑 1。
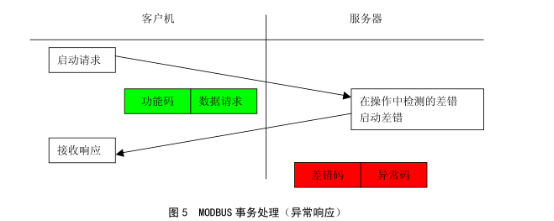
注释:需要管理超时,以便明确地等待可能不会出现的应答。
串行链路上第一个MODBUS执行的长度约束限制了MODBUS PDU大小 (最大RS485ADU=256字节) 。
因此, 对串行链路通信来说,MODBUS PDU=256-服务器地址(1 字节)-CRC(2 字节)=253字节。
从而:
RS232 / RS485 ADU = 253 字节+服务器地址(1 byte) + CRC (2 字节) = 256 字节。
TCP MODBUS ADU = 249 字节+ MBAP (7 字节) = 256 字节。
MODBUS 协议定义了三种 PDU。它们是:
MODBUS 请求 ,modbus_request
MODBUS 响应 ,modbus_reply
MODBUS 异常响应 ,modbus_reply_exception
1.5.数据模型
MODBUS 以一系列具有不同特征表格上的数据模型为基础。四个基本表格为:
|
基本表格 |
对象类型 |
访问类型 |
内容 |
|
离散量输入 |
单个比特 |
只读 |
I/O 系统提供这种类型数据 |
|
线圈 |
单个比特 |
读写 |
通过应用程序改变这种类型数据 |
|
输入寄存器 |
16-比特字 |
只读 |
I/O 系统提供这种类型数据 |
|
保持寄存器 |
16-比特字 |
读写 |
通过应用程序改变这种类型数据 |
1.6.设计背景
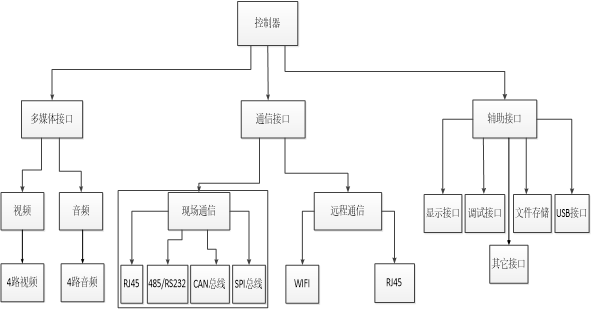
因为公司发展需要需要研发一个基于ARM9芯片的中央控制器(如下:设计架构图和硬件设计图),可以用来控制前端设备,并与云平台和用户进行交互。其中一个重要的功能就是要求设备设备能采集前端设备(表示在控制器之前的所有设计,就是前段设备)的信息,同时也可以对前端设备采集来的信息进行反馈控制。经过市场研究和调查,现在采集设备485通信用的比较多,而且大多设备都支持MODBUS通信协议,因此开发一个Modbus协议库,越来越有必要。
设计架构图:

硬件结构设计:
在我们进行软件设计的同时,也同步进行硬件的设计,但是一些前段设备,我们都是从外面的产家进行购买的,包括气体传感器(如CO、CH4等)、电量采集、流量采集(水流、气体等)的采集,控制一类的主要有灯光控制、门禁、水泵等。同时,如果有相关的同行,或者产家也可以和我联系,我们正在进行采购测试的,如果合适的话,我们也可以建立长期的合作伙伴。
2.功能码
2.1.功能码分类
有三类 MODBUS 功能码。它们是:
公共功能码
- 是较好地被定义的功能码,
- 保证是唯一的,
- MODBUS 组织可改变的,
- 公开证明的,
- 具有可用的一致性测试,
- MB IETF RFC 中证明的,
- 包含已被定义的公共指配功能码和未来使用的未指配保留供功能码。
用户定义功能码
- 有两个用户定义功能码的定义范围,即 65 至 72 和十进制 100 至 110。
- 用户没有 MODBUS 组织的任何批准就可以选择和实现一个功能码
- 不能保证被选功能码的使用是唯一的。
- 如果用户要重新设置功能作为一个公共功能码,那么用户必须启动 RFC,以便将改变引入
- 公共分类中,并且指配一个新的公共功能码。
保留功能码
- 一些公司对传统产品通常使用的功能码,并且对公共使用是无效的功能码。
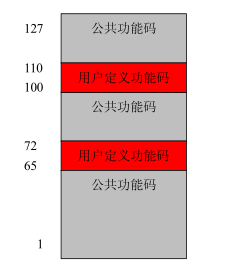
2.2.公共功能码定义

3.MODBUS通信模块设计
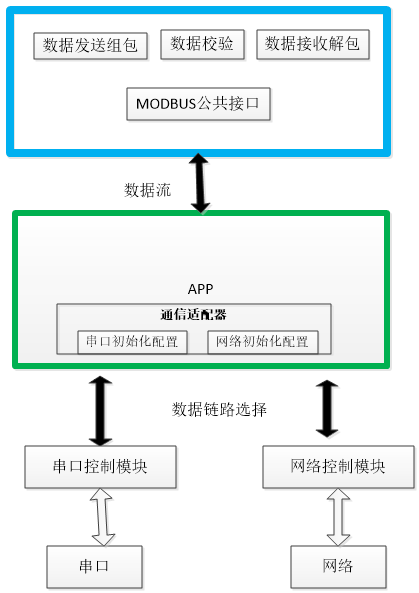
3.1.模块概述
Modbus通信模块是多功能控制器中必不可少的一个功能,有了它才能使外部设备(如除湿装置、荧光测温、温湿度检测、六氟化硫检测)与COM控制器的进行数据传输、远程控制。因此Modbus通信协议的地位自然不言而喻。
3.2.设计目标
实现对外设数据的读取和控制功能。
3.3.设计原则
尽量做到模块的分层设计。
3.4.运行环境
操作系统:Linux
3.5.模块结构设计
4.模块功能设计
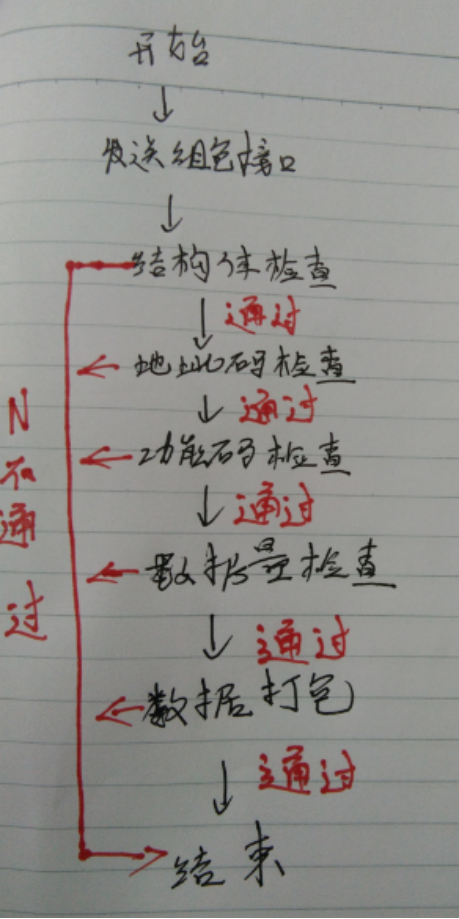
4.1.发送组包功能设计
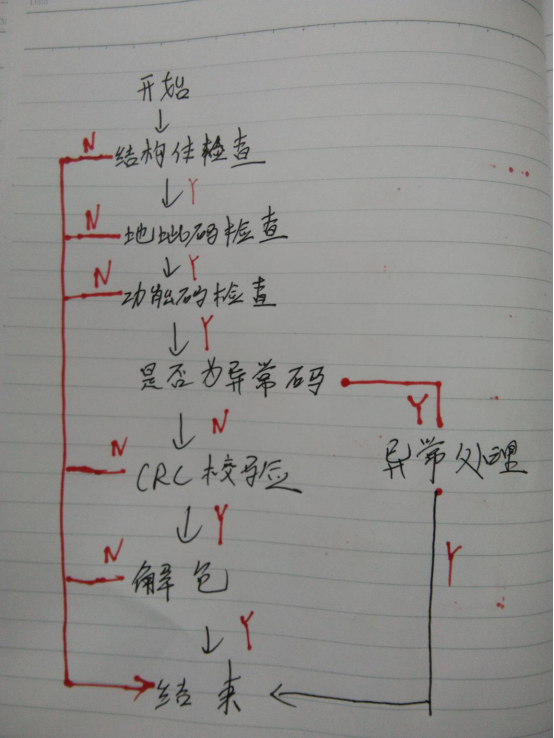
4.2.接收解包功能设计
4.3.串口管理模块设计
4.3.1.计算机串口的引脚说明
|
序号 |
信号名称 |
符号 |
流向 |
功能 |
|
2 |
发送数据 |
TXD |
DTE→DCE |
DTE发送串行数据 |
|
3 |
接收数据 |
RXD |
DTE←DCE |
DTE 接收串行数据 |
|
4 |
请求发送 |
RTS |
DTE→DCE |
DTE 请求 DCE 将线路切换到发送方式 |
|
5 |
允许发送 |
CTS |
DTE←DCE |
DCE 告诉 DTE 线路已接通可以发送数据 |
|
6 |
数据设备准备好 |
DSR |
DTE←DCE |
DCE 准备好 |
|
7 |
信号地 |
|
|
信号公共地 |
|
8 |
载波检测 |
DCD |
DTE←DCE |
表示 DCE 接收到远程载波 |
|
20 |
数据终端准备好 |
DTR |
DTE→DCE |
DTE 准备好 |
|
22 |
振铃指示 |
RI |
DTE←DCE |
表示 DCE 与线路接通,出现振铃 |
4.3.2.串口操作的头文件定义
#include <stdio.h> /*标准输入输出定义*/
#include <stdlib.h> /*标准函数库定义*/
#include <unistd.h> /*Unix 标准函数定义*/
#include <sys/types.h> /*数据类型,比如一些XXX_t的那种*/
#include<sys/stat.h> /*定义了一些返回值的结构,没看明白*/
#include<fcntl.h> /*文件控制定义*/
#include<termios.h> /*PPSIX 终端控制定义*/
#include<errno.h> /*错误号定义*/
4.3.3、串口设置
(1)、串口文件位于/dev目录下,而且以tty开飞的,
其中:串口一 为 /dev/ttyS0,串口二 为 /dev/ttyS1,等等。其中/dev/ttyUSB* 表示USB转串口。如:
(2)、串口的打开和设置
打开串口是通过使用标准的文件打开函数操作:
int fd; /*以读写方式打开串口*/ fd = open( "/dev/ttyS0", O_RDWR); if (-1 == fd){ /* 不能打开串口一*/ MFS_LOG_TRACE_ERR(" 提示错误!"); }
(3)、设置串口
最基本的设置串口包括波特率设置,效验位和停止位设置,串口的设置主要是设置 struct termios 结构体的各成员值。
struct termio { unsigned short c_iflag; /* 输入模式标志 */ unsigned short c_oflag; /* 输出模式标志 */ unsigned short c_cflag; /* 控制模式标志*/ unsigned short c_lflag; /* local mode flags */ unsigned char c_line; /* line discipline */ unsigned char c_cc[NCC]; /* control characters */ };
(4)、串口的读写
如果不是开发终端之类的,只是串口传输数据,而不需要串口来处理,那么使用原始模式(Raw Mode)方式来通讯。
发送数据:
char buffer[1024]; int Length; int nByte; nByte = write(fd, buffer ,Length)
读取串口数据:
使用文件操作read函数读取,如果设置为原始模式(Raw Mode)传输数据,那么read函数返回的字符数是实际串口收到的字符数。
可以使用操作文件的函数来实现异步读取,如fcntl,或者select等来操作。
char buff[1024]; int Len; int readByte = read(fd,buff,Len); 关闭串口: 关闭串口就是关闭文件。 close(fd);
4.4.接口设计
Modbus通信协议设计:
/************************外部接口************************************/ /*发送组包*/ /*参数说明: Modbus_t *ctx : 操作设备的简要信息 modbus_msg *msg:modbus消息结构体,指需要进行打包或解包的信息 */ int modbus_pack(modbus_t *ctx,msg_src *src ,modbus_msg *msg);//pack *msg); /*参数说明: Modbus_t *ctx : 操作设备的简要信息 unsigned int *src:数据的目标地址 modbus_msg *msg:modbus消息结构体,指需要进行打包或解包的信息 */ Int modbus_unpack(modbus_t *ctx,msg_src* req,msg_src* rsp,resolve_src* dest); /*modbus上下文信息结构体*/ typedef struct modbus_t{ modbus_type_t type; //modbus的通信类型,rtu、ascii、tcp等 int slave; //客户端地址 int *s; //表示实例化之后的串口编号 unsigned int devicecode; //设备编码 unsigned int functiontype; //功能类别的编码 struct timeval timeout; //延时 char *devicename; //设备名称 modbus_error_recovery_mode error_recovery; //错误的恢复模式 int debug; };
说明:设备类别编码优先级大于功能类别编码,解决部分设备可能由于更换产家等原因导致功能相同,但是数据协议不同的情况
/*Modbus消息结构体*/ typedef struct modbus_msg{
uint8_t function_code; //modbus的功能码 int start_addr; //数据的起始地址 int data_length; //数据长度(数据个数) int write_data; //写入数据的值 uint8_t *s_dest; //small dest uint16_t *dest; //线圈、离散量数据 uint16_t *regisdate; //寄存器操作的数据 }
/*********************内部接口**************************************/
//源消息结构体 typedef struct _modbus_src_t { uint8_t *msg_src; //数组的地址 int msg_len; //数组的长度 }msg_src; typedef enum { MODBUS_ERROR_RECOVERY_NONE = 0, MODBUS_ERROR_RECOVERY_LINK = (1<<1), MODBUS_ERROR_RECOVERY_PROTOCOL = (1<<2) } modbus_error_recovery_mode;
串口管理模块设计:
/*************************接口的设计*************************/ typedef struct _dts { serial_mode serial_mode; //串口的通信类型,RS485、RS232等 int s; //表示实例化之后的串口编号 unsigned int devicecode; //设备编码 struct timeval timeout; //延时 char *devicename; //设备名称 int error_recovery; //错误的恢复模式 int debug; void *backend_data; }dts_t,dts; (命名方式:)device to seial dts* serial_set_new(const char *device, int baud, char parity, int data_bit, int stop_bit,struct timeval timeout); //串口的结构设计 typedef struct _serial { /* Device: "/dev/ttyS0", "/dev/ttyUSB0" or "/dev/tty.USA19*" on Mac OS X. */ char *device; /* Bauds: 9600, 19200, 57600, 115200, etc */ int baud; /* Data bit */ uint8_t data_bit; /* Stop bit */ uint8_t stop_bit; /* Parity: 'N', 'O', 'E' */ char parity; #if defined(_WIN32) struct win32_ser w_ser; DCB old_dcb; #else /* Save old termios settings */ struct termios old_tios; #endif #if HAVE_DECL_TIOCSRS485 int serial_mode; #endif #if HAVE_DECL_TIOCM_RTS int rts; int rts_delay; int onebyte_time; void (*set_rts) (dts *ctx, int on); #endif /* To handle many slaves on the same link */ int confirmation_to_ignore; } serial_t; //串口的工作模式 typedef enum _serial_mode { SERIAL_RS232=0, SERIAL_RS485 }serial_mode;