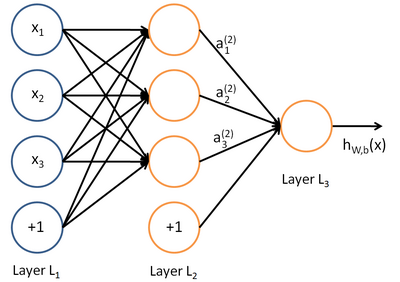
我们知道神经网络有forward propagation,很自然会想那有没有Backpropagation,结果还真有。
forward progation相当于神经网络额一次初始化,但是这个神经网络还缺少训练,而Backpropagation Algorithm就是用来训练神经网络的。
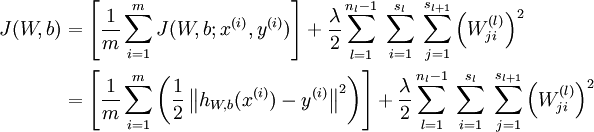
假设现在又m组训练集

代价函数为:
单个神经元的

神经网络的:
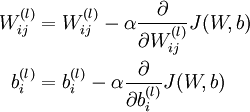
现在用经典的梯度下降法求解:
其中
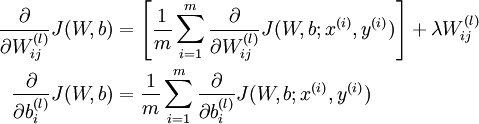
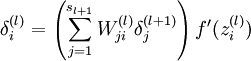
我们引入误差项 代表第l层的第i个单元对于整个我们整个神经网络输出误差的贡献大小
代表第l层的第i个单元对于整个我们整个神经网络输出误差的贡献大小
还记得我们前面提到

Backpropagation algorithm:
- Perform a feedforward pass, computing the activations for layers L2, L3, and
so on up to the output layer
 .
. - For each output unit i in layer nl (the output layer), set
-
- For

-
For each node i in layer l, set
-
-
For each node i in layer l, set
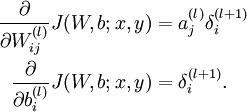
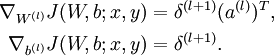
- Compute the desired partial derivatives, which are given as:
-

The algorithm can then be written:
- Perform a feedforward pass, computing the activations for layers
 ,
,  ,
up to the output layer
,
up to the output layer  , using the equations defining the forward propagation
steps
, using the equations defining the forward propagation
steps - For the output layer (layer
 ), set
), set
-
- For

-
Set
-
-
Set
- Compute the desired partial derivatives:
-


还BP算法中很重要的是中间隐层误差项的推导,我们接下来特别地详细研究一下:
我们假设代价函数为
-
 ,
,
其中
-
 是训练集的输出线
是训练集的输出线 -
 是实际的输出项
是实际的输出项 -
我们现在也求解

其中


特别地,如果是隐含层j,那么


综上可以得到:


参考资料:
http://en.wikipedia.org/wiki/Backpropagation
http://deeplearning.stanford.edu/wiki/index.php/UFLDL_Tutorial
版权声明:本文为博主原创文章,未经博主允许不得转载。