本文主要是通过迁移的思维,记录本人初次使用NXP MCUXpresso SDK API进行BSP开发
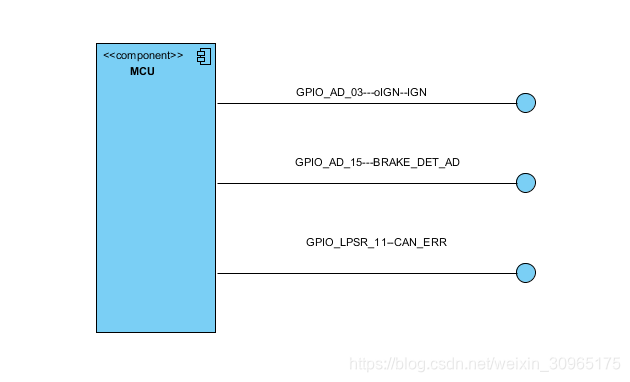
前面调通了SDRAM Flash之后,接下来调试GPIO 输入功能,硬件设计如下所示
1. 首先阅读原理图
2. 调试过程
2. 1 引脚初始化
/**
* @brief GPIO Input pin init
*
* @param [in] void
* @param [out] None
*
* @return
*
* @history
* 1.Date : 2021-5-27 14:25:57
* Author : panzidong
* Modification : Created function
*/
void bsp_input_init_config(void) {
CLOCK_EnableClock(kCLOCK_Iomuxc); /* LPCG on: LPCG is ON. */
CLOCK_EnableClock(kCLOCK_Iomuxc_Lpsr); /* LPCG on: LPCG is ON. */
/* GPIO configuration of oIGN on GPIO_AD_03 (pin P15) */
gpio_pin_config_t oIGN_config = {
.direction = kGPIO_DigitalInput,
.outputLogic = 0U,
.interruptMode = kGPIO_NoIntmode
};
/* Initialize GPIO functionality on GPIO_AD_03 (pin P15) */
GPIO_PinInit(GPIO9, 2U, &oIGN_config);
/* GPIO configuration of BRAKE_DET_AD on GPIO_AD_15 (pin M14) */
gpio_pin_config_t BRAKE_DET_AD_config = {
.direction = kGPIO_DigitalInput,
.outputLogic = 0U,
.interruptMode = kGPIO_NoIntmode
};
/* Initialize GPIO functionality on GPIO_AD_15 (pin M14) */
GPIO_PinInit(GPIO9, 14U, &BRAKE_DET_AD_config);
/* GPIO configuration of CAN_ERR on IOMUXC_LPSR_SW_MUX_CTL_PAD_GPIO_LPSR_11 (pin T5) */
gpio_pin_config_t CAN_ERR_config = {
.direction = kGPIO_DigitalInput,
.outputLogic = 0U,
.interruptMode = kGPIO_NoIntmode
};
/* Initialize GPIO functionality on IOMUXC_LPSR_SW_MUX_CTL_PAD_GPIO_LPSR_11 (pin T5) */
GPIO_PinInit(GPIO12, 11U, &CAN_ERR_config);
IOMUXC_SetPinMux(
IOMUXC_GPIO_AD_03_GPIO9_IO02, /* GPIO_AD_03 is configured as GPIO9_IO02 */
0U); /* Software Input On Field: Input Path is determined by functionality */
IOMUXC_SetPinMux(
IOMUXC_GPIO_AD_15_GPIO9_IO14, /* GPIO_AD_15 is configured as GPIO9_IO14 */
0U); /* Software Input On Field: Input Path is determined by functionality */
IOMUXC_SetPinMux(
IOMUXC_GPIO_LPSR_11_GPIO12_IO11, /* GPIO_LPSR_11 is configured as GPIO12_IO11 */
0U); /* Software Input On Field: Input Path is determined by functionality */
IOMUXC_SetPinConfig(
IOMUXC_GPIO_AD_03_GPIO9_IO02,
IOMUXC_SW_PAD_CTL_PAD_PUE(0x0)); /*Forbidden Pull Down Pull Up*/
IOMUXC_SetPinConfig(
IOMUXC_GPIO_AD_15_GPIO9_IO14,
IOMUXC_SW_PAD_CTL_PAD_PUE(0x0)); /*Forbidden Pull Down Pull Up*/
IOMUXC_SetPinConfig(
IOMUXC_GPIO_LPSR_11_GPIO12_IO11,
IOMUXC_SW_PAD_CTL_PAD_PUE(0x0)); /*Forbidden Pull Down Pull Up*/
}
2. 2 获取电平
/**
* @brief get oIGN input level
*
* @param [in] None
* @param [out] None
*
* @return
*
* @history
* 1.Date : 2021-5-27 9:48:47
* Author : panzidong
* Modification : Created function
*/
int bsp_input_oIGN_level(){
return GPIO_PinRead(INPUT_oIGN_GPIO, INPUT_oIGN_GPIO_PIN);
}
/**
* @brief get BRAKE_DET_AD input level
*
* @param [in] None
* @param [out] None
*
* @return
*
* @history
* 1.Date : 2021-5-27 9:49:21
* Author : panzidong
* Modification : Created function
*/
int bsp_input_BRAKE_DET_AD_level(){
return GPIO_PinRead(INPUT_BRAKE_DET_AD_GPIO, INPUT_BRAKE_DET_AD_GPIO_PIN);
}
/**
* @brief get CAN_ERR input level
*
* @param [in] None
* @param [out] None
*
* @return
*
* @history
* 1.Date : 2021-5-27 9:50:21
* Author : panzidong
* Modification : Created function
*/
int bsp_input_CAN_ERR_level(){
return GPIO_PinRead(INPUT_CAN_ERR_GPIO, INPUT_CAN_ERR_GPIO_PIN);
}
3. 总结
在调试GPIO时,虽然可以正常获取到GPIO的高低电平,但是输入电平为高时,测量引脚电平只有1.7V。最后通过断开引脚的禁用引脚的上下拉解决。
IOMUXC_SetPinConfig(
IOMUXC_GPIO_AD_03_GPIO9_IO02,
IOMUXC_SW_PAD_CTL_PAD_PUE(0x0)); /*Forbidden Pull Down Pull Up*/
IOMUXC_SetPinConfig(
IOMUXC_GPIO_AD_15_GPIO9_IO14,
IOMUXC_SW_PAD_CTL_PAD_PUE(0x0)); /*Forbidden Pull Down Pull Up*/
IOMUXC_SetPinConfig(
IOMUXC_GPIO_LPSR_11_GPIO12_IO11,
IOMUXC_SW_PAD_CTL_PAD_PUE(0x0)); /*Forbidden Pull Down Pull Up*/