程序清单11.4~11.6(运算符重载——添加加法运算符)
//1.h class Time { private: int hours; int minutes; public: Time(); Time(int h, int m = 0); void AddMin(int m); void AddHr(int h); void Reset(int h=0,int m=0); Time operator+(const Time & t) const;//重载之前为:Time Sum(const Time & t) const; //只要把运算符(这里为“+”)放到operator后面,并将结果用做方法名即可 void show() const; }; //1.cpp #include <iostream> #include "1.h" using namespace std; Time::Time() { hours = minutes = 0; } Time::Time(int h, int m) { hours = h; minutes = m; } void Time::AddMin(int m) { minutes += m; hours += minutes / 60; minutes %= 60; } void Time::AddHr(int h) { hours += h; } void Time::Reset(int h , int m ) { hours = h; minutes = m; } Time Time::operator+(const Time & t) const { Time sum; sum.minutes = minutes + t.minutes; sum.hours = hours + t.hours + sum.minutes / 60; sum.minutes %= 60; return sum; } void Time::show() const { cout <<" "<< hours << " hours, " << minutes << " minutes"<<endl; } //main.cpp #include<iostream> #include "1.h" using namespace std; void main() { Time plan,total; Time coding(2, 40); Time fixing(5, 55); cout << "planning time ="; plan.show(); cout << "coding time ="; coding.show(); cout << "fixing time ="; fixing.show(); int a = 5, b = 6; cout << "a+b="<<a + b << endl;//int型加法 total = coding + fixing;//Time型加法(即“+”号重载) cout << "coding + fixing ="; total.show(); Time morefixing(3, 28); cout << "more fixing time ="; morefixing.show(); total = morefixing.operator+(total); cout << "morefixing.operator+(total) ="; total.show(); system("pause"); }



程序清单11.7~11.9
只贴出与上面代码不同的地方
//1.h Time operator-(const Time & t) const; Time operator*(double n) const; //1.cpp Time Time::operator-(const Time & t) const{ Time diff; int tot1,tot2; tot1=t.minutes+60*t.hours; tot2=minutes+60*hours; diff.minutes=(tot2-tot1)%60; diff.hours=(tot2-tot1)/60; return diff; } Time Time::operator*(double n) const{ Time result; long totalMinutes=hours*n*60+minutes*n; result.hours=totalMinutes/60; result.minutes=totalMinutes%60; return result; } //main.cpp #include<iostream> #include "1.h" using namespace std; void main() { Time total,diff,adjust; Time weeding(4, 35); Time waxing(2, 47); cout << "weeding time ="; weeding.show(); cout << "waxing time ="; waxing.show(); total = weeding + waxing; cout << "weeding + waxing ="; total.show(); diff = weeding - waxing; cout << "weeding - waxing ="; diff.show(); adjust = total * 1.5; cout << "adjust work time ="; adjust.show(); system("pause"); }
程序清单11.10~11.12(友元)
只贴出与上面代码不同的地方
//1.h friend Time operator*(double m,const Time &t) { return t*m; }//只有在类声明的原型中才能使用friend关键字 friend std::ostream & operator<<(std::ostream &os,const Time &t); //1.cpp std::ostream & operator<<(std::ostream &os,const Time &t){ os << t.hours << " hours, " << t.minutes << " minutes"; return os; } //main.cpp #include<iostream> #include "1.h" using namespace std; void main() { Time temp; Time aida(3, 35); Time tosca(2, 48); cout << "Aida and Tosca: "; cout <<aida<<"; "<<tosca<<endl; temp=aida+tosca; cout << "Aida and Tosca:"<<temp<<endl; temp=aida*1.17; cout << "Aida * 1.17:"<<temp<<endl; cout << "10.0 * Tosca:"<<10.0*tosca<<endl; system("pause"); }
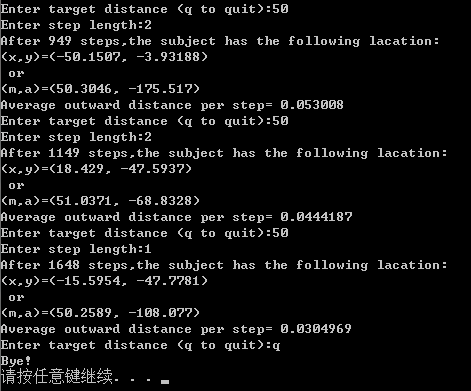
程序清单11.13~11.15(Vector实现矢量操作:模拟随机漫步)
1 //1.h 2 #ifndef VECTOR_H_ 3 #define VECTOR_H_ 4 #include<iostream> 5 6 namespace VECTOR{ 7 class Vector //类声明 8 { 9 public: 10 enum Mode{RECT,POL}; 11 private: 12 double x; 13 double y; 14 double mag;//长度 15 double ang;//角度 16 Mode mode; 17 void set_mag(); 18 void set_ang(); 19 void set_x(); 20 void set_y(); 21 public: 22 Vector();//默认构造函数 23 Vector(double n1,double n2,Mode form=RECT); 24 void reset(double n1,double n2,Mode form=RECT); 25 ~Vector();//析构函数 26 //以下四个函数在类声明中定义,因此自动成为内联函数;不改变对象数据,所以声明时使用const 27 double xval() const {return x;} 28 double yval() const {return y;} 29 double magval() const {return mag;} 30 double angval() const {return ang;} 31 void polar_mode(); 32 void rect_mode(); 33 //重载 34 Vector operator+(const Vector &b) const; 35 Vector operator-(const Vector &b) const; 36 Vector operator-() const; 37 Vector operator*(double n) const; 38 //友元 39 friend Vector operator*(double n,const Vector &a); 40 friend std::ostream &operator<<(std::ostream &os,const Vector &V); 41 }; 42 } 43 #endif 44 45 //1.cpp 46 #include <cmath> 47 #include "1.h" //include <iostream> 48 using namespace std; 49 50 namespace VECTOR{ 51 const double Rad_to_deg=45.0/atan(1.0); 52 53 void Vector::set_mag(){ 54 mag=sqrt(x*x+y*y); 55 } 56 void Vector::set_ang(){ 57 if(x==0.0&&y==0.0) 58 ang=0.0; 59 else 60 ang=atan2(y,x); 61 } 62 void Vector::set_x(){ 63 x=mag*cos(ang); 64 } 65 void Vector::set_y(){ 66 y=mag*sin(ang); 67 } 68 69 Vector::Vector(){//默认构造函数 70 x=y=mag=ang=0.0; 71 mode=RECT; 72 } 73 Vector::Vector(double n1,double n2,Mode form){ 74 mode=form; 75 if(form==RECT){ 76 x=n1; 77 y=n2; 78 set_mag(); 79 set_ang(); 80 }else if(form==POL){ 81 mag=n1; 82 ang=n2/Rad_to_deg; 83 set_x(); 84 set_y(); 85 }else{ 86 cout<<"Incorrect 3rd argument to Vector() -- vector set to 0"<<endl; 87 x=y=mag=ang=0.0; 88 mode=RECT; 89 } 90 } 91 92 void Vector::reset(double n1,double n2,Mode form){ 93 mode=form; 94 if(form==RECT){ 95 x=n1; 96 y=n2; 97 set_mag(); 98 set_ang(); 99 }else if(form==POL){ 100 mag=n1; 101 ang=n2/Rad_to_deg; 102 set_x(); 103 set_y(); 104 }else{ 105 cout<<"Incorrect 3rd argument to Vector() -- vector set to 0"<<endl; 106 x=y=mag=ang=0.0; 107 mode=RECT; 108 } 109 } 110 Vector::~Vector(){}//析构函数 111 112 void Vector::polar_mode(){ 113 mode=POL; 114 } 115 void Vector::rect_mode(){ 116 mode=RECT; 117 } 118 119 Vector Vector::operator+(const Vector &b) const{ 120 return Vector(x+b.x,y+b.y); 121 } 122 Vector Vector::operator-(const Vector &b) const{ 123 return Vector(x-b.x,y-b.y); 124 } 125 Vector Vector::operator-() const{ 126 return Vector(-x,-y); 127 } 128 Vector Vector::operator*(double n) const{ 129 return Vector(n*x,n*y); 130 } 131 132 Vector operator*(double n,const Vector &a){ 133 return a*n; 134 } 135 ostream &operator<<(ostream &os,const Vector &v){ 136 if(v.mode==Vector::RECT) 137 os<<"(x,y)=("<<v.x<<", "<<v.y<<")"; 138 else if(v.mode==Vector::POL) 139 os<<"(m,a)=("<<v.mag<<", "<<v.ang*Rad_to_deg<<")"; 140 else 141 os<<"Vector object mode is invalid"; 142 return os; 143 } 144 } 145 146 //main.cpp 147 #include<iostream> 148 #include<cstdlib> //rand(),srand() 149 #include<ctime> //time() 150 #include "1.h" 151 using namespace std; 152 using VECTOR::Vector; 153 154 void main() { 155 srand(time(0)); //随机数种子生成器 156 double direction; 157 Vector step; 158 Vector result(0.0,0.0); 159 unsigned long steps=0; 160 double target; 161 double dstep; 162 cout << "Enter target distance (q to quit):"; 163 while (cin>>target) 164 { 165 cout<<"Enter step length:"; 166 if(!(cin>>dstep))//输入错误就退出 167 break; 168 while (result.magval()<target) 169 { 170 direction=rand()%360; 171 step.reset(dstep,direction,Vector::POL); 172 result=result+step; 173 steps++; 174 } 175 cout<<"After "<<steps<<" steps,the subject has the following lacation:"<<endl; 176 cout<<result<<endl; 177 result.polar_mode(); 178 cout<<" or "<<result<<endl; 179 cout<<"Average outward distance per step= "<<result.magval()/steps<<endl; 180 steps=0; 181 result.reset(0.0,0.0); 182 cout << "Enter target distance (q to quit):"; 183 } 184 cout<<"Bye! "; 185 cin.clear(); 186 while (cin.get()!=' ')//直到换行才退出 187 continue; 188 189 system("pause"); 190 }
未完……