前言:最近在做一个有意思的问题,关于旋转矩阵变换后会发生什么?开始猜想对其做行初等变换,应该不会改变旋转矩阵的实质的旋转性质。但测试结果好像跟猜想不太一样?
测试:
1、第一次对旋转矩阵R的某一行乘上一个数,然后将R转换为欧拉角和四元数;
2、第二次对旋转矩阵R的某一行乘上一个数加到另一行上,然后将R转换为欧拉角和四元数;
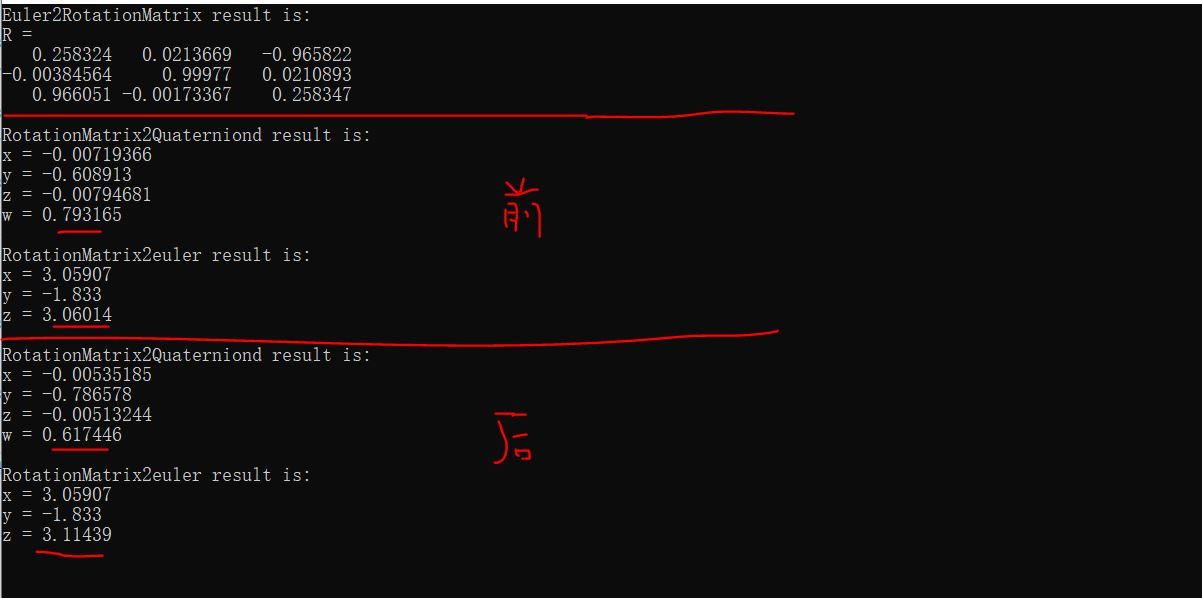
图1 测试1
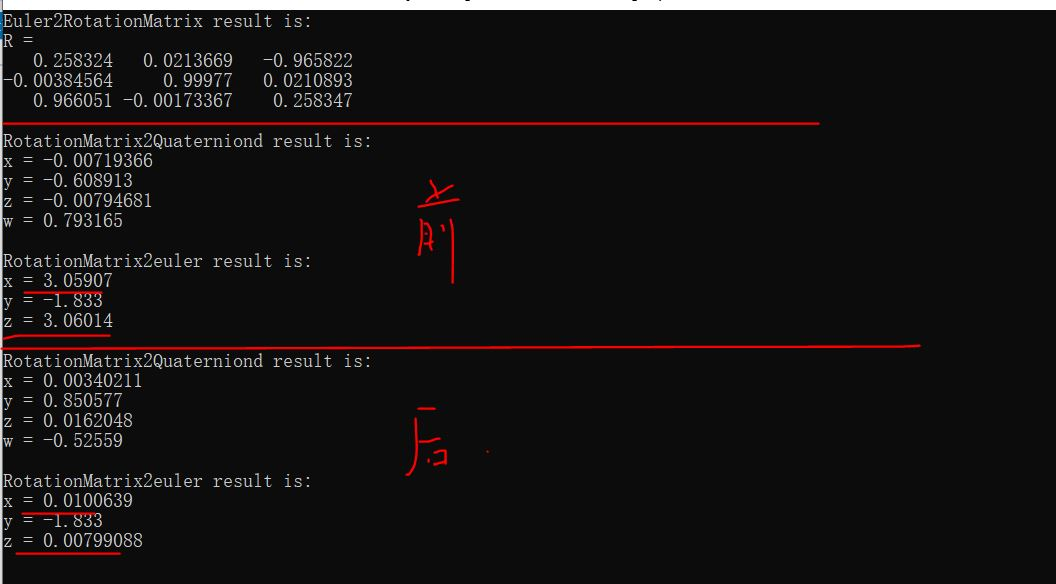
图2 测试2
代码:
#include <iostream> #include <stdlib.h> #include <Eigen/Eigen> #include <Eigen/Geometry> #include <Eigen/Core> #include <vector> #include <math.h> using namespace std; using namespace Eigen; Eigen::Quaterniond euler2Quaternion(const double roll, const double pitch, const double yaw) { Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ()); Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY()); Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX()); Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle; q.normalize(); cout << "Euler2Quaternion result is:" << endl; cout << "x = " << q.x() << endl; cout << "y = " << q.y() << endl; cout << "z = " << q.z() << endl; cout << "w = " << q.w() << endl << endl; return q; } Eigen::Vector3d Quaterniond2Euler(const double x, const double y, const double z, const double w) { Eigen::Quaterniond q; q.x() = x; q.y() = y; q.z() = z; q.w() = w; Eigen::Vector3d euler = q.toRotationMatrix().eulerAngles(2, 1, 0); cout << "Quaterniond2Euler result is:" << endl; cout << "x = " << euler[2] << endl; cout << "y = " << euler[1] << endl; cout << "z = " << euler[0] << endl << endl; return euler; } Eigen::Matrix3d Quaternion2RotationMatrix(const double x, const double y, const double z, const double w) { Eigen::Quaterniond q; q.x() = x; q.y() = y; q.z() = z; q.w() = w; Eigen::Matrix3d R = q.normalized().toRotationMatrix(); cout << "Quaternion2RotationMatrix result is:" << endl; cout << "R = " << endl << R << endl << endl; return R; } Eigen::Quaterniond rotationMatrix2Quaterniond(Eigen::Matrix3d R) { Eigen::Quaterniond q = Eigen::Quaterniond(R); q.normalize(); cout << "RotationMatrix2Quaterniond result is:" << endl; cout << "x = " << q.x() << endl; cout << "y = " << q.y() << endl; cout << "z = " << q.z() << endl; cout << "w = " << q.w() << endl << endl; return q; } Eigen::Matrix3d euler2RotationMatrix(const double roll, const double pitch, const double yaw) { Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ()); Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY()); Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX()); Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle; Eigen::Matrix3d R = q.matrix(); cout << "Euler2RotationMatrix result is:" << endl; cout << "R = " << endl << R << endl << endl; return R; } Eigen::Vector3d RotationMatrix2euler(Eigen::Matrix3d R) { Eigen::Matrix3d m; m = R; Eigen::Vector3d euler = m.eulerAngles(0, 1, 2); cout << "RotationMatrix2euler result is:" << endl; cout << "x = " << euler[2] << endl; cout << "y = " << euler[1] << endl; cout << "z = " << euler[0] << endl << endl; return euler; } Eigen::Matrix3d matrixTransion(Eigen::Matrix3d& R) { Eigen::Matrix3d M(R); //M(0, 2) = R(0, 1) * (-1) * 3 + R(0, 2); //M(1, 2) = R(1, 1) * (-1) * 3 + R(1, 2); //M(2, 2) = R(2, 1) * (-1) * 3 + R(2, 2); M(2, 0) = R(0, 0)*3 + R(2, 0); M(2, 1) = R(0, 1)*3 + R(2, 1); M(2, 2) = R(0, 2)*3 + R(2, 2); return M; } int main(int argc, char **argv) { //this is euler2Quaternion transform function,please input your euler angle// //euler2Quaternion(2.55356, - 0.751701, -35.1082); //-0.0148858, -0.00671055, -1.30948 //Eigen::Quaterniond q = Eigen::Quaterniond(-0.00482526, 0.00153114, 0.997521, -0.0701826); //q.normalize(); //cout << " test q:: "<< endl; //cout << "x = " << q.x() << endl; //cout << "y = " << q.y() << endl; //cout << "z = " << q.z() << endl; //cout << "w = " << q.w() << endl << endl; //"w":1.23782,"x":-0.013243,"y":-0.00426015,"z":-0.390197 //this is Quaternion2Euler transform function,please input your euler angle// //Quaterniond2Euler(0, 0, 0, 1); //this is Quaternion2RotationMatrix transform function,please input your Quaternion parameter// //Quaternion2RotationMatrix(0, 0, 0, 1); //this is euler2RotationMatrix transform function,please input your euler angle for the function parameter// Eigen::Matrix3d R = euler2RotationMatrix(-0.0148858, -0.00671055, -1.30948); rotationMatrix2Quaterniond(R); RotationMatrix2euler(R); Eigen::Matrix3d M = matrixTransion(R); //this is rotationMatrix2Quaterniond transform function,please input your RotationMatrix parameter like following// rotationMatrix2Quaterniond(M); //this is RotationMatrix2euler transform function,please input your euler angle for the function parameter// RotationMatrix2euler(M); return 0; }
结论:变换前后欧拉角和四元数变化了,这说明旋转矩阵R 是不能做初等变换的,而且齐次变换矩阵T(RT)也是不能做初等变换的。