课堂学习:他励直流电机机械特性,硬度的概念,关于正反转的固有机械特性。直流电机启动特性,启动电阻的影响,还有特性图的分析。直流电机调速特性及影响其变化的一些做法。直流电机启动特性,有关反馈制动和反接制动的分析。交流电机结构,旋转磁场变化,转速、频率分析。有关问题:启动特性的分析,串联电阻的作用方式不明白。
课外阅读:从特斯拉最初的交流电机,到多相系统,到工作出多个发明成功。他充满创造力,善于在细节中发现问题,又能忍受艰苦环境致力于研究。在电流之战中,特斯拉种种发明和自己独特的思路让自己主动,他的痴迷也获得了许多尊重。
仿真作业:
根据仿真要求,
Tm-Tl = J * der(n) * 6.28 / 60;
Tm= Kt * i;
u= i * (R+R1+R2+R3) + Ke * n;
R为电枢电阻,采用串三段电阻启动。R1、R2、R3
启动时转矩T1>Tl,且有切换时T2>Tl
计算:
根据切换处,切除第一级电阻前后转速不变
最开始,Ra1=Ra+R1+R2+R3
切除后 Ra2=Ra+R2+R3
切除第一级电阻前
Tm1-Tl=J(dn1/dt)(2PI/60)
Tm1=Kt*i1
u=Ke*n1+i1*(R+R1+R2+R3)
之后 Tm2=Kt*i2
u=Ke*n1+i2*(R+R2+R3)
而电枢电压u不变,R1、R2、R3待设计。
则根据以上等式可算出i1和i2的比值,根据设计各级切除电阻前后电流i1、i2不变。
根据各级所得数据,
I2/i1=(R+R1+R2+R3)/ (R+R2+R3);
I2/i1=(R+R2+R3)/(R+R3);
I2/i1=(R+R3)/R;
设i2/i1=a,则逐级代换 R+R1+R2+R3=R*a^3
又知初值,n=0,启动转矩T1,u= i * (R+R1+R2+R3) 即为额定电压240V,
则i=240/R*a^3 ,i为整个启动过程中的最大电流,i=16.2a,解出a=2.22,则各级电阻
R1=3.66 Ω;R2=1.64Ω;R3=0.74Ω
满足要求。且T1=(1.6~2)Tn,T2=(1.1~1.2)Tn
切断时间设定为T1=2.8s ,T2=4.8s, T3=6.8s
则编程如下:
model motor1 "An DC Motor Model"
type Voltage=Real(unit="V");
type Current=Real(unit="A");
type Resistance=Real(unit="Ohm");
type Speed=Real(unit="r/min");
type Torque=Real(unit="N.m");
type Inertia=Real(unit="kg.m^2");
Torque Tm"Torque of the Motor";
Speed n"Speed of the Motor";
Current i"Armature Current";
Voltage u"Voltage Source";
Resistance R_ad"External Resistance";
Resistance R1"Start-up Resistance";
Resistance R2"Start-up Resistance";
Resistance R3"Start-up Resistance";
parameter Real J = 1"Total Inertia";
parameter Real R = 0.6"Armature Resistance";
parameter Real Kt = 1.8"Torque Constant";
parameter Real Ke = 0.189"EMF Constant";
parameter Real Tl = 29.2"Load Torque";
parameter Real i1=48.6"Maximum Current";
parameter Real i2=17.8"Minimum Current";
equation
Tm-Tl = J * der(n) * 6.28 / 60;
Tm= Kt * i;
u= i * (R+R_ad+R1+R2+R3) + Ke * n;
if time <= 0.1 then
u = 0;
R_ad = 0;
else
u = 240;
R_ad = 0;
end if;
if time <= 2.8 then
R1=3.66;
else
R1=0;
end if;
if time <= 4.8 then
R2=1.64;
else
R2=0;
end if;
if time <= 6.8 then
R3=0.74;
else
R3=0;
end if;
end motor1;
经过设定,仿真启动特性如下:
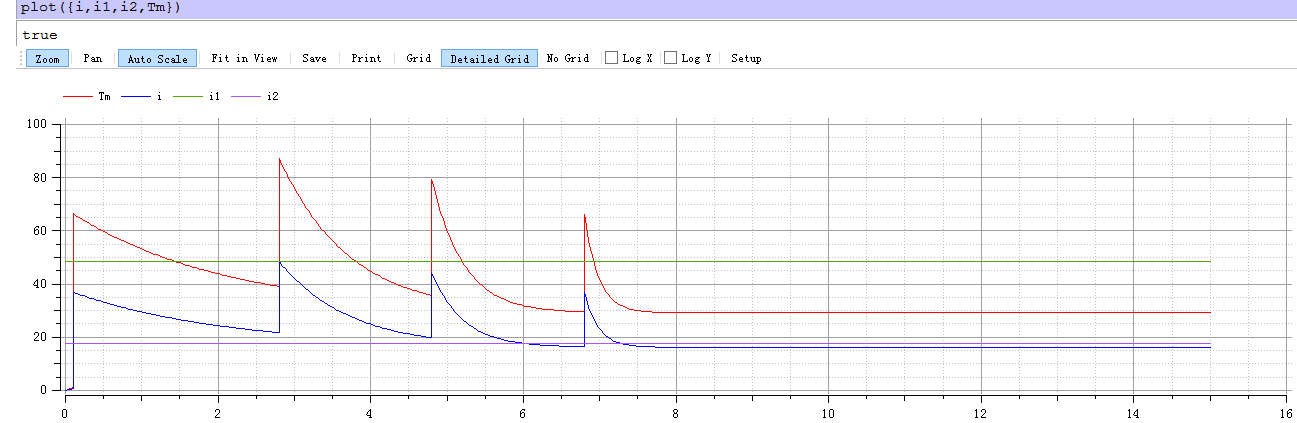
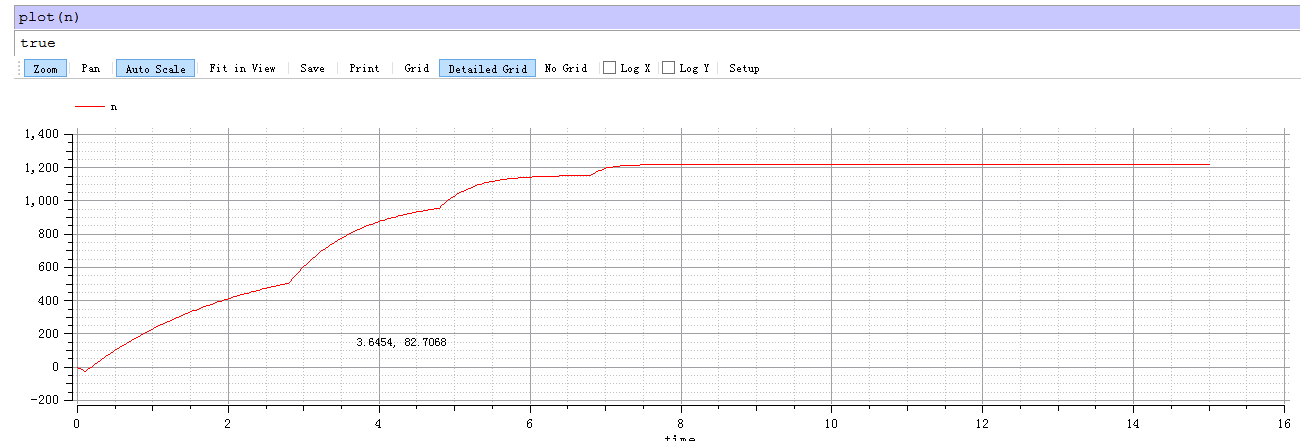
结果稳定性如上。