【第一季】CH08_FPGA_Button 按钮去抖动实验
按键的消抖,是指按键在闭合或松开的瞬间伴随着一连串的抖动,这样的抖动将直接影响设计系统的稳定性,降低响应灵敏度。因此,必须对抖动进行处理,即消除抖动的影响。实际工程中,有很多消抖方案,如RS触发器消抖,电容充放电消抖,软件消抖。本章利用FPGA内部来设计消抖,即采取软件消抖。
按键的机械特性,决定着按键的抖动时间,一般抖动时间在5ms~10ms。消抖,也意味着,每次在按键闭合或松开期间,跳过这段抖动时间,再检测按键的状态。只要通过简单的延时就可实现按键的消抖动。
8.1硬件介绍
MIZ702(MIZ702N、MIZ701N看原理图PIN脚定义不一样,配套源码已经改好XDC文件的PIN脚)底板中配套5个独立按键与ZYNQ PL相连,具体请参考对应开发板原理图。由于各个按键独立,消抖过程是一样的,故本节就用板子上的一个按键SW3来模拟实际环境。按键每按一次,对应的LED灯反转一次。即检测按键是否有闭合和断开的过程,如果有,第一次则LED灯点亮,第二次,则LED灯熄灭。
原理图入下图所示
8.2 硬件原理图
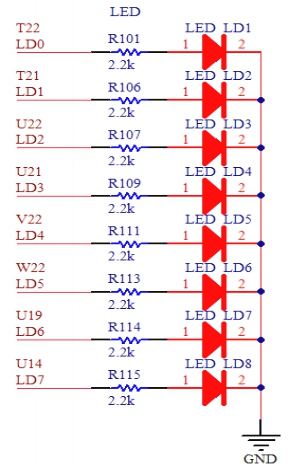

PIN脚定义(讲解以MIZ702讲解,MIZ701N只有4个LED 2个按钮):
| GCLK:Y9(PL输入时钟) LD0:T22 LD1:T21 LD2:U22 LD3:U21 LD4:V22 LD5:W22 LD6:U19 LD7:U14 | BTNU:T18 BTNC:P16 BTNL:N15 BTNR:R18 BTND:R16 |
8.2时序设计
由于按键固有的特性,在每次闭合和断开时,经过抖动-稳定-抖动-稳定的过程。因此,检测按键是否有按下的过程,则要进行两次消抖处理。通过检测按键输入的值,当检测到BTNC为低电平时,启动计数器,做10ms延时,再检测一次,若BTNC依然为低,则说明,BTNC被按下,设置按键按下标志位。再次检测BTNC,若BTNC为高电平,做10ms延时,第二次检测,若依然为高电平,则说明BTNC已断开,设置BTNC断开标志位,通过两个标志位,可以判断,BTNC已经完成了一次闭合到断开的过程,则led灯反转一次。消抖基本流程如下图所示。

采用状态机来实现上面的流程是非常方便的。通过状态机的切换,按键每次由闭合到断开的过程中,分别产生low_flag和high_flag,当这两个同时为高电平时,led灯实现一次翻转。即第一次按键led高亮,第二次按键led熄灭,第三次led高亮……
8.3程序源码
| `timescale 1ns / 1ps //----------------------------------------------------------------------------------------------------- /* * 文件名字:Key_Jitter.v * 程序描述: * 作 者: * 修改日期: * 版 本 号: * 版权所有:南京米联电子科技有限公司 */ //----------------------------------------------------------------------------------------------------- module Key_Jitter( input clk_i, input rst_n_i, input key_i, output [3:0] led_o, output [18:0] div_cnt_tb, output [2:0] key_state_tb ); localparam DELAY_Param=19'd499_999;//for project //localparam DELAY_Param=19'd1500; //for simulation //localparam DELAY_Param=19'd10; //No filter jitter reg [3:0] led_o_r; (*KEEP = "TRUE" *)reg [18:0] div_cnt;//10ms去抖时间计数器 always@(posedge clk_i or negedge rst_n_i) begin if(!rst_n_i) div_cnt<=19'd0; else if(div_cnt<DELAY_Param) div_cnt<=div_cnt+1'b1; else div_cnt<=0; end wire delay_10ms=(div_cnt==DELAY_Param) ? 1'b1:1'b0; //按键检测状态机 localparam DETECTER1=3'b000; localparam DETECTER2=3'b001; localparam DETECTER3=3'b010; localparam DETECTER4=3'b011; localparam LED_DIS =3'b100; reg low_flag; reg high_flag; reg [2:0] key_state; always@(posedge clk_i or negedge rst_n_i) begin if(!rst_n_i) begin key_state<=DETECTER1; low_flag<=0; high_flag<=0; led_o_r<=4'b1111; end else if(delay_10ms) //每10ms检测一次,每次检测按键闭合和断开过程,led灯翻转一次 begin case(key_state) DETECTER1 : begin if(key_i!=1'b1) key_state<=DETECTER2; else key_state<=DETECTER1; end DETECTER2 : begin if(key_i!=1'b1) begin low_flag<=1'b1; key_state<=DETECTER3; end else begin key_state<=DETECTER1; low_flag<=low_flag; end end DETECTER3 : begin if(key_i==1'b1) key_state<=DETECTER4; else key_state<=DETECTER3; end DETECTER4 : begin if(key_i==1'b1) begin high_flag<=1'b1; key_state<=LED_DIS; end else begin high_flag<=high_flag; key_state<=DETECTER3; end end LED_DIS : begin if(high_flag & low_flag) begin key_state<=DETECTER1; led_o_r<=~led_o_r; high_flag<=1'b0; low_flag<=1'b0; end else begin led_o_r<=led_o_r; key_state<=key_state; high_flag<=high_flag; low_flag<=low_flag; end end default: begin key_state<=DETECTER1; led_o_r<=0; high_flag<=0; low_flag<=0; end endcase end else begin key_state<=key_state; led_o_r<=led_o_r; high_flag<=high_flag; low_flag<=low_flag; end end assign led_o=led_o_r; assign div_cnt_tb=div_cnt; assign key_state_tb=key_state; endmodule |
8.4程序分析
• 程序中定义了div_cnt计数器,实现10ms消抖延时操作;
• 程序中定义了key_state一段式状态机,该状态机包括5个状态。其中前4个为按键闭合与断开检测与消抖状态,在完成前4个状态后,通过led灯的翻转来表现按键的闭合与断开;
• 程序中定义了两个标志位,分别为low_flag和high_flag。low_flag表示检测到按键按下,即按键闭合,high_flag表示检测到按键弹起,即按键断开。当着两个标志为同时为1时,表示按键完成一次闭合与断开;
• 程序中,对状态机做了循环,来回不停检测按键状态,且每次状态的切换时间是10ms,状态的切换时间,也是按键消抖检测过程。
8.5综合布线前仿真时序
为清晰地表达程序工作流程,在源代码中,添加了div_cnt_tb,div_start_tb,key_state_tb这些信号。且程序中将有意将计数器另外设置一个较小的值,这是为了减少仿真等待的时间。其仿真图如下所示。


8.6 在线逻辑分析仪仿真
对于消抖试验而言,逻辑分析仪不能很直观表现整个设计流程,故该节将放弃使用,直接观察按键按下,LED灯能否正确熄灭和点亮作为试验结果。
8.7输出结果
按键SW4每按一次,LED灯很好地熄灭和点亮。LED灯响应无差错。为清晰的表示消抖的效果,可将延时参数设置很小,可以发现,按键有时候明明已经按下去了,LED却无响应。
8.8小结
按键消抖,是轻触开关必须进行的一项操作。否则,按键将无法使用。在一个工作系统当中,由于按键未消抖,甚至可能直接使系统崩溃。从上面的几个例子也可以看出,无论是按键消抖,还是跑马灯等,设计的前提是要熟练掌握verilog语法。后续章节中,将不在局限于单个文件。在代码量逐渐增加的基础上,将分模块分文件来实现整个系统的功能。