Convolutional Neural Networks (CNNs / ConvNets)
前面做了如此漫长的铺垫,现在终于来到了课程的重点。Convolutional Neural Networks, 简称CNN,与之前介绍的一般的神经网络类似,CNN同样是由可以学习的权值与偏移量构成,每一个神经元接收一些输入,做点积运算加上偏移量,然后选择性的通过一些非线性函数,整个网络最终还是表示成一个可导的loss function,网络的起始端是输入图像,网络的终端是每一类的预测值,通过一个full connected层,最后这些预测值会表示成SVM或者Softmax的loss function,在一般神经网络里用到的技巧在CNN中都同样适用。
那么,CNN与普通的神经网络相比,又有哪些变化呢?CNN的网络结构可以直接处理图像,换句话说CNN的输入就是直接假设为图像,这一点有助于我们设计出具备某些特性的网络结构,同时前向传递函数可以更加高效地实现,并且将网络的参数大大减少。
Architecture Overview
前面介绍的普通的神经网络,我们知道该网络接收一个输入,通过一系列的隐含层进行变换,每个隐含层都是由一些神经元组成,每一个神经元都会和前一层的所有神经元连接,这种连接方式称为 full connected,每一层的神经元的激励函数都是相互独立,没有任何共享。最后一个full connected层称为输出层,在分类问题中,它表示每一类的score。
一般来说,普通的神经网络不能很好地扩展到处理图像,特别是高维图像,因为神经元的连接是full connected的方式,导致一般的神经网络处理大图像的时候将会引入海量的参数,而这样很容易造成overfitting。
而CNN,利用了输入是图像这一事实,他们用一种更加明智的方法来设计网络结构,具体说来,不像普通的神经网络,CNN中的每一层的神经元被排列成一个三维模型:拥有width,height以及depth。这里的depth指的是CNN每一层的纵深,并非指整个CNN结构的纵深。比如,对于CIFAR-10数据库来说,输入是一个三维的volume,32
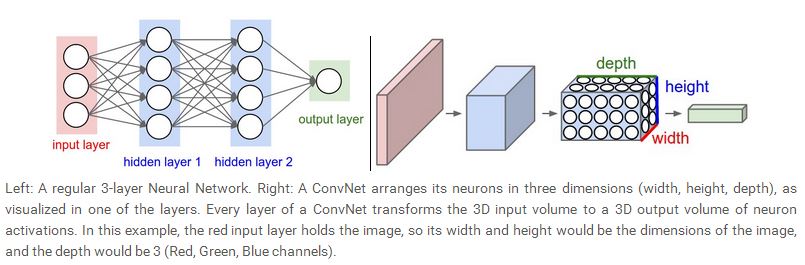
上图左边是一般的神经网络,这个网络有两个隐含层,右边是CNN,将每一层的神经元排列成一个三维的volume,可以将3D的输入volume转化为3D的输出volume.
Layers used to build ConvNets
上一节已经提到,CNN的每一层都将某种输入通过某些可导函数转化为另一种输出,一般来说,我们主要利用三种类型的layer去构建一个CNN,这三种类型的layer分别是convolutional layer, pooling layer 以及full connected layer,这三种类型的layer通过组合叠加从而组成一个完整的CNN网络。我们先来看一个简单的例子,以CIFAR-10数据库为例,我们要设计一个CNN网络对CIFRA-10进行分类,那么一个可能的简单结构是:[INPUT-CONV-RELU-POOL-FC],其中:
INPUT:[32
CONV: 是卷积层,计算输入层的局部神经元与连接到CONV层神经元的连接系数的点积,如果假设depth是12的话,那么可能的输出就是[32
POOL: 这一层主要执行降采样的功能,可能的输出为[16
FC: 这一层计算最终的每一类的score,输出为[1
所以,利用这种结构,CNN通过一层一层的传递作用,将原始的图像最后映射到每一类的score。我们可以看到,有些层有参数,有些层没有参数。特别地,CONV/FC层不仅仅只是通过激励函数做转化,而且参数(权值,偏移量)也起到非常重要的作用,另一方面,POOL/RELU 层只是固定的函数在起作用,并没有涉及到参数,CONV/FC层的参数将通过梯度下降的方法训练得到,使得训练样本的预测值与目标值吻合。
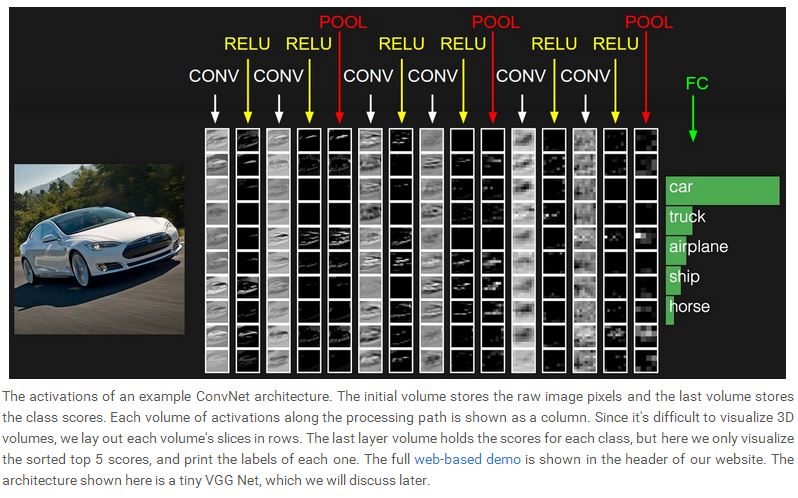
下图给出了一个典型的CNN结构。
总之,CNN可以总结如下:
1):一个CNN结构是由一系列的执行不同转化功能的layers组成的,将输入的原始图像映射到最后的score。
2):整个网络结构,只有少数几类不同功能的layer (CONV/FC/RELU/POOL 是目前比较流行的几种)。
3):每一层都接收一个3-D的数据体,最后也会输出一个3-D的数据体。
4):有些层有参数(CONV/FC),有些层没有(RELU/POOL)。
5):有些层还可能有hyperparameters(CONV/POOL/FC),有些层则没有(RELU)。
接下来,我们要描述每一类layer的作用,以及相关的参数。
Convolutional Layer
Conv layer是CNN网络的核心部件,它的输出可以看成是一个3-D的数据体,CONV 层包含一系列可学的filters,这些filter的尺寸都很小,但是可以扩展到input的整个depth,前向传递的时候,filter在输入图像上滑动,产生一个2-D的关于filter的激励映射,filter只会和局部的一些像素(神经元)做点积,所以每一个输出的神经元可以看成是对输入层的局部神经元的激励,我们希望这些filter通过训练,可以提取某些有用的局部信息。我们接下来探讨到更加详细的细节。
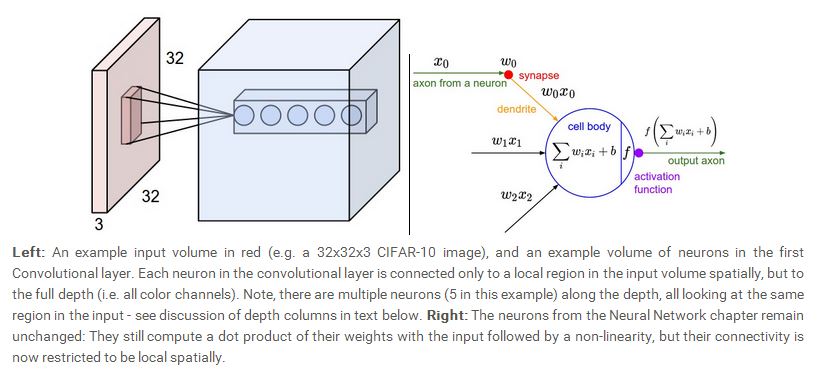
当输入是高维的变量,比如图像等,如果采用full connected的连接是不切实际的,相反,我们会采用局部连接的方式,那么每一个局部区域我们称为receptive field,这种局部连接是针对输入层的宽,高这两个维度来说,但是对于第三个维度depth来说,依然是要完全连接,所以我们处理局部空间在宽,高维度与depth这个维度是不一样的。宽,高维度上,我们采取局部连接,但是对于depth维度,我们采用全连方式。
比如,如果一个输入图像的尺寸是[32
再比如,假设现在有一个输入的数据体是16
这两个例子都说明了,在宽,高维度我们采用局部连接的方式,而在depth维度,我们会全部连接。下面给出了一个简单的示意图:
前面我们介绍了CONV层的神经元与前一层的连接方式,但是CONV层本身的神经元如何排列,而且其尺寸如何,我们还没有讨论,事实上,CONV层本身的神经元如何排列以及CONV层的尺寸由三个因素决定:depth,stride,zero padding。
首先,depth决定了CONV层中有多少神经元可以与前一层相同的神经元相连,这个类似普通的神经网络,在普通的神经网络中,我们知道每一个神经元都与上一层的所有神经元相连,所有每一层的所有神经元都是与上一层相同的神经元相连。我们将会看到,所有这些神经元将通过学习从而对输入的不同特征产生应激作用,比如,如果第一个CONV层接收的是原始输入图像,那么沿着depth维度排列的神经元(注意:这些神经元连接的输入层的神经元都相同)可能对不同的特性(比如边界,颜色,斑块)等产生激励。我们将这些连接到输入层同一区域的神经元称为一个depth volume。
接下来,我们必须指定stride,这个决定了我们如何在CONV层排列depth volume,如果我们指定stride为1,那么depth volume的排列将会非常紧凑,意味着隔一个神经元就会有一个depth volume,这样会产生比较大的重叠,而且输出的尺寸也会很大,如果我们增大stride,可以减少重叠,并且可以减少输出的尺寸。
zero padding就是为了控制输出的尺寸,对输入图像的边缘进行补零操作,因为卷积可能使输出图像的尺寸减少,有的时候为了得到与输入一样的尺寸,我们可以在做卷积之前先对输入图像的边缘补零,即先增大输入图像的尺寸,这样可以使得最终的卷积结果与补零前的输入图像的尺寸一致。
我们可以看到,输出层有一个depth,一个spatial size,depth可以指定,spatial size与输入层的size(
我们可以看一个例子,如果输入图像的尺寸为[227
继续看上面的例子,我们知道CONV层有55
我们可以利用一个合理的假设来大大系数的数量,我们将CONV层看成一个depth volume,比如上面这个例子,CONV层是一个55
如果每一个slice里的神经元都共享同样的连接系数,那么实际运算的时候可以利用卷积运算,其实这也是这个网络名称的由来,卷积在其中发挥重要的作用,所有我们有的时候把这些系数称为filter或者kernel,卷积的结果就是activation map,每一个activation map叠加,最后形成一个55
总结一下CONV的特点:
接收一个尺寸为
定义一些相关的hyperparameter,比如filter的个数
尺寸为:
会有一个
CONV层的backpropagation 同样是卷积运算,这个具体的细节留到后面详细探讨。
Pooling Layer
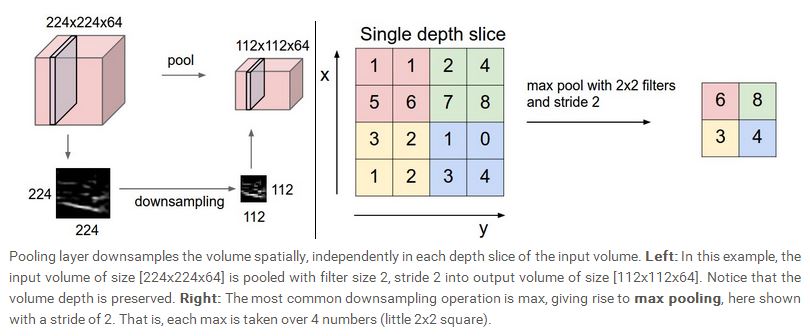
一般来说,在两个CONV layer之间,会插入一共pooling layer,pooling layer的作用一个是减少输入的空间尺寸,从而可以降低参数的数量及运算量,同时也可以控制overfitting。Pooling layer与上一层的每一个slice是一一对应的,没有相互交叉。最常见的pooling 运算是采用max 操作,在
接收一个尺寸为
max pooling 的backpropagation,简单来说就是只对输入的最大值进行梯度运算,所以每次前向运算的时候,最好可以将最大值的位置记录下来,这样每次backward的时候就可以方便运算。
Full-connected Layer
FC layer就像普通神经网络里的隐含层一样,FC layer中的每一个神经元与上一层所有的神经元都会连接(full connected),涉及到的运算也和普通的神经网络一样。值得注意的一点是,FC与CONV layer之间的区别仅在于CONV layer里的神经元只和上一层的局部神经元相连,但是两者的运算模式是一样的,都是做点积,因此在FC与CONV之间存在相互转换的可能。
对于CONV layer,如果我们从FC的角度来看,相当于乘了一个非常大的稀疏矩阵(大部分系数为0,因为只有局部神经元的连接是有效的),而且这些非0系数在某些block中是相等的(系数共享)。反过来,任何FC layer也可以有效地转换成CONV layer,比如一个神经元个数K=4096的FC layer,接收的输入是7
上面所说的两种转换,其中FC 转换为CONV 在实际运算中非常有用,考虑一个实际的CNN网络,最原始的输入为224
将第一个FC layer替换成CONV layer,其filter size 为7,我们可以得到1
上面所说的每一个转换都涉及到系数矩阵的reshape问题,这种转换可以让我们将CNN结构非常有效的在更大的图像上滑动。比如,如果一个224
我们可以看到,如果图像保持不动,而CNN网络每次以32个像素的stride在图像上移动,最后得到的结果是一样的。
一般来说,利用CNN网络做一次遍历,得到一个6
最后一点,如果我们想将CNN网络以小于32的stride有效地应用在图像上,可以通过多次前向传递运算达到目的。比如,我们想以16个像素的stride遍历图像,可以做两次运算,第一次是直接将CNN网络在原图上做遍历,第二次,先将原图在宽,高方向分别平移16个像素,然后在平移后的图像上做遍历。
ConvNet Architectures
我们已经看到,CNN网络一般只有几种类型的layer:CONV,POOL(一般默认为max pooling)以及FC,一般我们也会把RELU单独列为一层,用来执行非线性运算的操作,我们看看这些layer如何构建一个完整的CNN网络。
比较常见的模式是先叠加几层CONV-RELU layer,后面连上POOL layer,这样将输入的图像逐渐减少到一个比较小的尺寸,接来下,就连上Full connected layer,最后的FC layer是输出,所以一般比较常见的模式如下所示:
INPUT -> [[CONV -> RELU]*N -> POOL?]*M -> [FC -> RELU]*K -> FC
其中*表示重复叠加的意思,而POOL?表示这是可选择的,而且N>=0,一般N<=3,M>=0,K>=0,通常K<=3,下面是一些常见的CNN网络结构。
INPUT -> FC,这是最普通的线性分类器,N = M = K = 0.
INPUT -> CONV -> RELU -> FC
INPUT -> [CONV -> RELU -> POOL]*2 -> FC -> RELU -> FC 我们看到CONV layer后面连着Pool layer。
INPUT -> [CONV -> RELU -> CONV -> RELU -> POOL]*3 -> [FC -> RELU]*2 -> FC 我们看到在连接POOL layer之前,已经有两个CONV layer叠加到一起了。
一般我们会选择小尺寸的filter,这在实际应用中的效果会更好。一般来说,输入图像的尺寸最好是2的幂次方,比如32,64,96,224,384以及512。CONV 层一般用比较小的filter,比如
现在流行的CNN网络结构都是非常庞大的,比较著名的CNN结构有如下几个LeNet, AlexNet, ZF Net, Google Net, VGGNet,具体的介绍可以参考课程网站。这里不再详述。
声明:lecture notes里的图片都来源于该课程的网站,只能用于学习,请勿作其它用途,如需转载,请说明该课程为引用来源。