在开发 Cesium 程序时,需要快速确定场景中的对象什么时候不可见,从而判断它不需要渲染。
一种方法是使用视锥体平视剔除,但是还有另一种重要的剔除方法是地平线剔除。
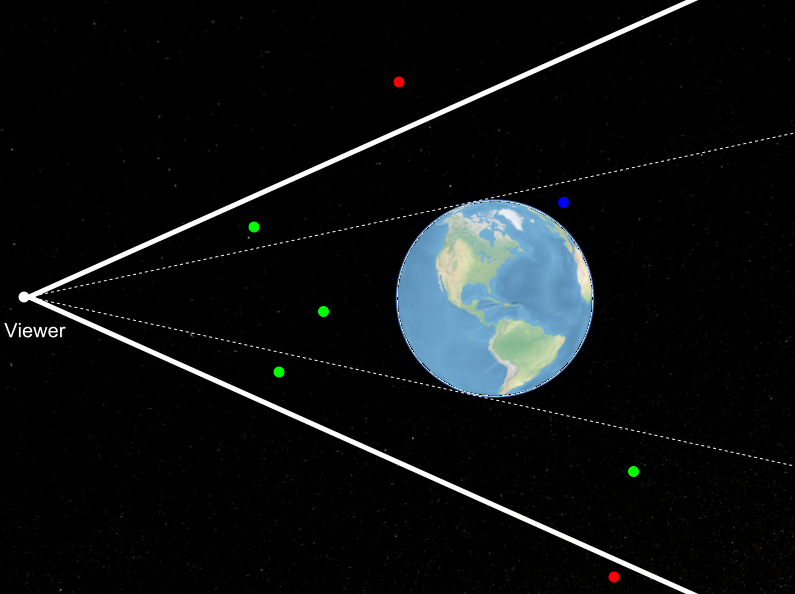
上图中,绿色点是 viewer 内可见的。红色点是不可见的,因为它们在视锥体外面(视锥体用粗白线画出)。蓝色点虽然在视锥体内,但是它在地球背面,所以它也是不可见的。换句话说,它在地平线下。
地平线剔除的思路很简单,即不需要渲染 viewer 视野中地平线之下的东西。听起来简单,但是细节挺多的,尤其是要考虑到性能问题(要快速剔除)。Cesium 每次渲染时,为了检测这些地形瓦片的可见性,就要测试上百次,不过这很重要。
相对于球体的地平线下点剔除
可为所有静态对象(例如瓦片)计算其范围球体(boundingSphere)。假设这个范围球体很小以至于与地球比起来,像一个点,如果这个点在地平线下,那么我们也能说这个瓦片就在地平线下。
当前提出的新算法仅限于对椭球体计算单个点的情况。现在不妨设“遮挡点”已经被计算出来了。
为了说明简便,先进行正球体的地平线剔除,然后再推广到椭球体的地平线剔除。
考虑下面这张图片:

上图中,蓝色的圆是一个单位球面,从 Viewer 向外延申并和单位球面相切的这两条细黑线表示地平线。
垂直的这根粗黑线表示地平线交单位球面的所有地平点,是一个圆。
从 Viewer 到这个圆上的所有点的向量,就构成了一个圆锥体(包括阴影部分)。
译者注
想象一下一个漏斗套一个乒乓球,大概就是这个情况
图中阴影部分表示地平线以下的区域,Viewer 看不到这些区域。换句话说,如果一个点在这个阴影区域,那么这个点就在地平线下。
计算某点位于平面的哪一侧
首先,做一个简单的计算,来算出这个点在垂直黑直线那个圆的圆面的哪一边:
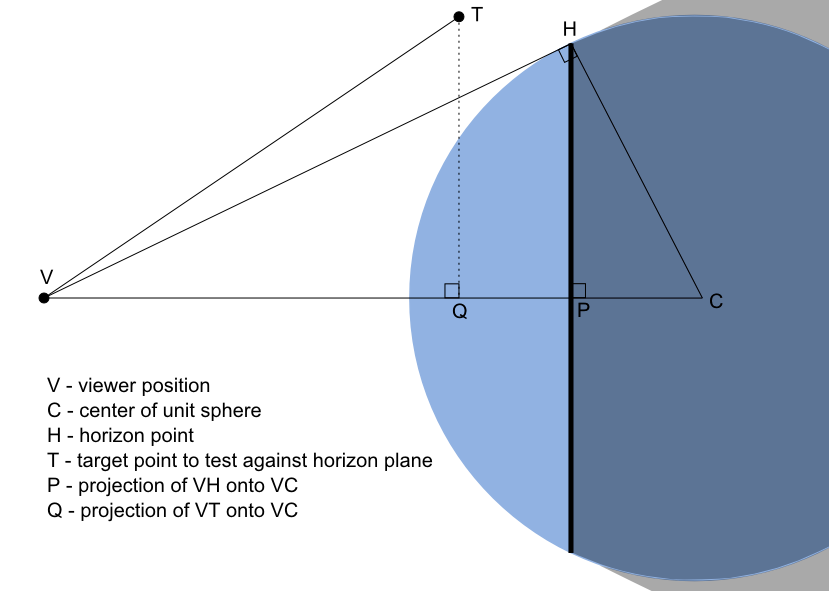
- V:Viewer的位置
- C:单位球面的中心
- H:地平线切单位球面的点
- T:待计算的目标点
- P:H点投影到VC向量的点
- Q:T点投影到VC向量的点
由勾股定理:
由单位球,易得 (vec{HC}) 向量的长度是1:
易证 (△VCH) 和 (△HCP) 相似,所以有:
代入 (||vec{HC}|| =1),整理得
所以,Viewer 到平面(下文均用平面简称,即地平线与球面相切的所有点的集合构成的圆周代表的面,即图上垂直黑色粗线)的距离:
如果,(vec{VT}) 在 (vec{VC}) 的投影 (vec{VQ}) 长度小于 (vec{VP}),那么点就在平面内(视锥内)。
换句话说,如果 (||vec{VQ}||>||vec{VP}||),那么点就在地平线下:
左右均乘以 (||vec{VC}||),即
结论
若想知道目标点位于平面的前面还是后面,只需取 Viewer 到目标点的向量 (vec{VT})、Viewer 到单位球心的向量 (vec{VC}),求其内积,判断结果与 Viewer 到单位球心距离与1的差的大小即可。
若大于,则点在地平线下(平面后),反之则在平面前(地平线上)
判断目标点与圆锥体的关系
仍旧是考虑原来的图,这次考虑两个角 (∠HVC)(记为α)、(∠TVC)(记为β)

当角 β < α 时,目标点 T 就位于圆锥内了。
在 ([0, π]) 区间上,对于任意的 β > α,有
角 α 是 (Rt△VCH) 的一个角,所以:
由余弦的定义,cos(β) 可写为
即
两边同时乘上 (||vec{VC}||) 并同时平方,则
根据上一节的计算结果 (||vec{VH}||^2=||vec{VC}||^2-1)
最终,得到的不等式关系是:
(vec{VT}) 和 (vec{VC}) 都很容易计算,若上式不等号成立,则说明目标点在视锥内,否则在视锥外。
推广到椭球体的情况
上述均为单位球的情况,现在推广到椭球体上。
单位球的方程是:
椭球体的方程是:
其中,a、b、c是三个轴的半长(轴半径)。
利用缩放矩阵,可以将椭球体上的所有点归为单位球上的计算:
代码
作者认为数学推导过程很重要,但是可以归结成一些简单的代码。每当摄像机位置改变时,都要执行
// 椭球的三个轴半径 此处使用 WGS84椭球体
var rX = 6378137.0;
var rY = 6378137.0;
var rZ = 6356752.3142451793;
// 向量CV,缩放到单位球空间(除以各轴半径),方便计算
var cvX = cameraPosition.x / rX;
var cvY = cameraPosition.y / rY;
var cvZ = cameraPosition.z / rZ;
// 向量VH长度的平方
var vhMagnitudeSquared = cvX * cvX + cvY * cvY + cvZ * cvZ - 1.0;
然后对于每个点,要进行测试遮挡剔除算法:
// 目标点T,缩放到单位球空间(除以各轴半径),方便计算
var tX = position.x / rX;
var tY = position.y / rY;
var tZ = position.z / rZ;
// 向量VT
var vtX = tX - cvX;
var vtY = tY - cvY;
var vtZ = tZ - cvZ;
// 向量VT长度的平方
var vtMagnitudeSquared = vtX * vtX + vtY * vtY + vtZ * vtZ;
// VT点乘VC 和 VT点乘CV的相反数是一样的
var vtDotVc = -(vtX * cvX + vtY * cvY + vtZ * cvZ);
// bool值,前者是判断是否在平面内,后者判断是否在锥体内
var isOccluded = vtDotVc > vhMagnitudeSquared && vtDotVc * vtDotVc / vtMagnitudeSquared > vhMagnitudeSquared;
在 Cesium 中,预先进行了单位球空间的缩放,而不是每次测试都缩放。
EllipsoidalOccluder.prototype.isPointVisible = function (occludee) {
var ellipsoid = this._ellipsoid;
var occludeeScaledSpacePosition = ellipsoid.transformPositionToScaledSpace(
occludee,
scratchCartesian
);
return isScaledSpacePointVisible(
occludeeScaledSpacePosition,
this._cameraPositionInScaledSpace,
this._distanceToLimbInScaledSpaceSquared
);
};
展望
与之前使用最小范围球进行剔除的方法相比,使用这个技术减少大约 15% 的瓦片绘制。
其他就不翻译了
实际应用
在 Cesium 的私有类 EllipsoidalOccluder (位于Core目录下)中,就使用了这个算法进行剔除计算。