以上是有人發現的文章,然後和我討論,建議應該把” default: y=1’bx” 換成是” default: y=1’b0” 或是default: y=1’b1”。反正就是不應該是1’bx,不然會造成系統不穩,或是合成時,會有問題。
” default: y=1’bx” 真的會有問題嗎?
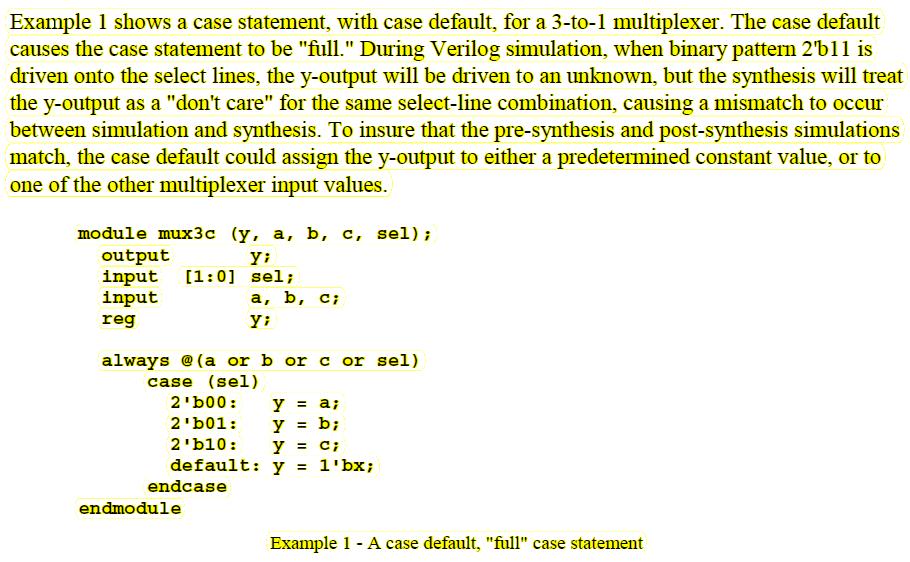
做為一個數位工程師,邏輯推理能力應該是我們自豪的。原英文描述是說在模擬(simulation)時,會有pre-synthesis simulation和post-synthesis simulation的結果不相同(mismatch),所以如果你是想要它相同的話,你應該是把1’bx換成是固定的值,這樣子,每次模擬時,就都會是一樣的。對於這樣子的建議,我同意的它的說法。但是,它的前面有個前提,你的1’bx是會被當成是”don’t care”來處理。我們都知道,don’t care就是不在乎它的結果,甚至每次都是不一樣也沒有關係。所以這樣子的”don’t care”當然會在不同的模擬過程,造成不同的結果。
我們都學過真值表(truth table)。
|
A fun B |
0 |
1 |
|
0 |
0 |
1 |
|
1 |
1 |
X |
上面的truth table表示什麼?當A=1、B=1時,我們不在乎它的值是0還是1。那你當然可以把它當成是0來做一個式子,你也可以用1來做另一個式子。那你也真的只是上面有1的結果來做你的式子。但不管哪一種,都會是你要的結果,都是不會錯的。因為會為1的等式必定成立。
上面的verilog 程式也是一樣的。如果這個don’t care是你真的想要的don’t care時,那模擬結果不同時,有差別嗎?答案是沒有;因為你已經把這個會發生的情形考慮清楚,做好所有的處理所以不會讓整個系統發生錯誤。
從上面的英文,都沒有描述到這樣子的做法會讓系統不穩定,或是合成時,會發生問題,以致於netlist是合錯的。
數位工程師最怕的模擬結果是mismatch,但是不是所有的mismatch都是錯誤。要從系統面和真值表中去了解設計的核心。不應該是怕mismatch,所以把所有的mismatch都是當成是錯誤的。這樣子的想法是不對的。
我再舉一個例子,請看下面的verilog的程式。
wire a; reg [2:0] FSM, FSM_nxt; always(posedge clki or negedge rstni) begin if(~rstni) FSM <=3'b001; else FSM <= FSM_nxt; end always@(*) begin case(FSM) 3'b001: if(a) FSM_nxt = 3'b010; else FSM_nxt = FSM; 3'b010: if(a) FSM_nxt = 3'b100; else FSM_nxt = FSM; 3'b100: if(a) FSM_nxt = 3'b001; else FSM_nxt = FSM; default: FSM_nxt = 3'bxxx; endcase end
同樣地,default都是有don’t care的描述,但是上面的don’t care並不會讓pre-post simulation和post-simulation產生?原因你知道嗎?因為default 的情況並不會產生,因為FSM的路徑是001->010->100的循環,並不會到別的狀態(例如: 011,110,111,000…等等)。因為FSM不會到達don’t case的狀態,所以不會產生mismatch。
那換另一個角度來思考,如果真的跑到don’t case的狀態,那又代表什麼?到目前為止,我遇到的都是表示你的這部份程式的timing violation產生。所以你應該再檢查一次你的synthesis的結果。或許你忽略了這部份的timing,亦或是你的synthesis constrain沒有設定正確,所以這部份的timing被忽視了。不管是哪一個情況,我們都知道don’t care是我們不想發生的情況,所以simulation看到xxx時,你可以很容易就警覺到問題,這對工程師是很有幫助的。
上述的英文讓我們了解到,如果你沒有把所有的情況考思清楚(含有用的狀態和沒有用的狀態),反而直觀地把所有沒有用的狀態都當成是don’t care時,這時會容易發生英文上所描述的事形發生,這時你就很容易被混淆,而誤會系統是不穩定的。
所以應該是,當你不知道要做什麼時,你不應該用don’t care的語法,因為這會讓你的系統發生你沒有預期的行為。而當你知道你真的是要用don’t care時,而你用don’t care語法,這表示你已經考慮到所有的狀態,並讓系統清楚知道要做出什麼的反應和行為,此時,系統就不會發生任何錯誤。
別再為了mismatch而去反抗mismatch;真正去了解為什麼會mismatch,並清楚知道整個系統的運作,會讓你學到更多的事情。