文章结构:
——> 一、定时器基本介绍
——> 二、普通定时器详细介绍TIM2-TIM5
——> 三、定时器代码实例
一、定时器基本介绍

之前有用过野火的学习板上面讲解很详细,所以直接上野火官方的资料吧,作为学习参考笔记发出来

二、普通定时器详细介绍TIM2-TIM5
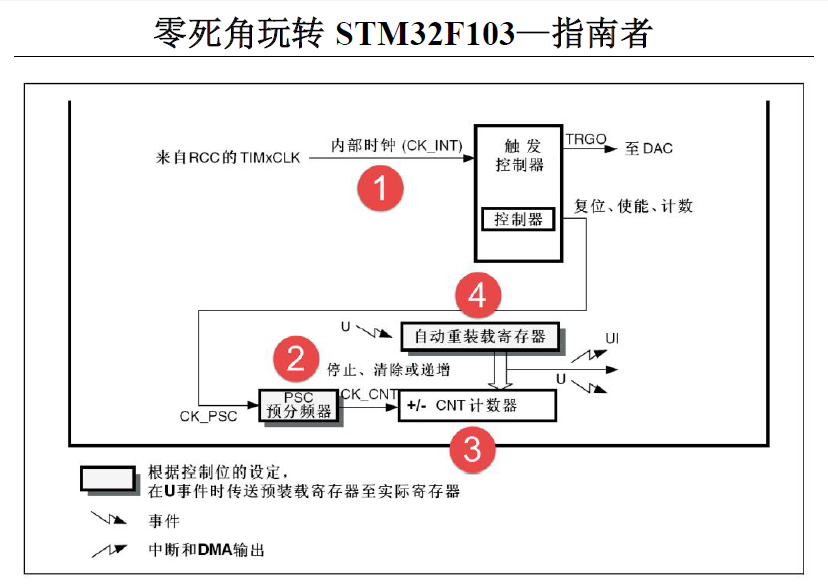
2.1 时钟来源
计数器时钟可以由下列时钟源提供:
·内部时钟(CK_INT)
·外部时钟模式1:外部输入脚(TIx)
·外部时钟模式2:外部触发输入(ETR)
·内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器,如可以配置一个定时器Timer1而作为另一个定时器Timer2的预分频器。
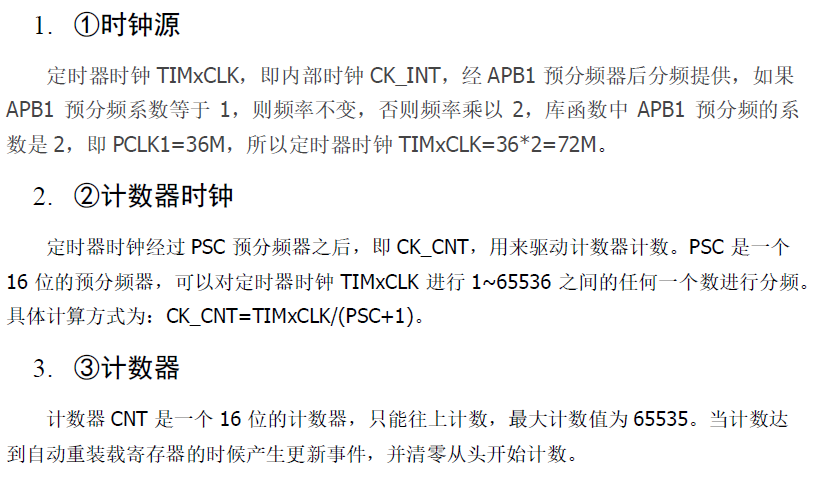
由于今天的学习是最基本的定时功能,所以采用内部时钟。TIM2-TIM5的时钟不是直接来自于APB1,而是来自于输入为APB1的一个倍频器。这个倍频器的作用是:当APB1的预分频系数为1时,这个倍频器不起作用,定时器的时钟频率等于APB1的频率(36MHZ);
当APB1的预分频系数为其他数值时(即预分频系数为2、4、8或16),这个倍频器起作用,定时器的时钟频率等于APB1的频率的2倍。
{
假如APB1预分频为2(变成36MHZ),则定时器TIM2-5的时钟倍频器起作用,将变成2倍的APB1(2x36MHZ)将为72MHZ给定时器提供时钟脉冲。 一般APB1和APB2的RCC时钟配置放在初始化函数中例如下面的void RCC_Configuration(void)配置函数所示,将APB1进行2分频,导致TIM2时钟变为72MHZ输入。
如果是1分频则会是36MHZ输入,如果4分频:CKINT=72MHZ/4x2=36MHZ; 8分频:CKINT=72MHZ/8x2=18MHZ;16分频:CKINT=72MHZ/16x2=9MHZ
}
1 //系统时钟初始化配置 2 void RCC_Configuration(void) 3 { 4 //定义错误状态变量 5 ErrorStatus HSEStartUpStatus; 6 //将RCC寄存器重新设置为默认值 7 RCC_DeInit(); 8 //打开外部高速时钟晶振 9 RCC_HSEConfig(RCC_HSE_ON); 10 //等待外部高速时钟晶振工作 11 HSEStartUpStatus = RCC_WaitForHSEStartUp(); 12 if(HSEStartUpStatus == SUCCESS) 13 { 14 //设置AHB时钟(HCLK)为系统时钟 15 RCC_HCLKConfig(RCC_SYSCLK_Div1); 16 //设置高速AHB时钟(APB2)为HCLK时钟 17 RCC_PCLK2Config(RCC_HCLK_Div1); 18 //设置低速AHB时钟(APB1)为HCLK的2分频(TIM2-TIM5输入TIMxCLK频率将为72MHZ/2x2=72MHZ输入) 19 RCC_PCLK1Config(RCC_HCLK_Div2); 20 //设置FLASH代码延时 21 FLASH_SetLatency(FLASH_Latency_2); 22 //使能预取指缓存 23 FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); 24 //设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHz 25 RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); 26 //使能PLL 27 RCC_PLLCmd(ENABLE); 28 //等待PLL准备就绪 29 while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); 30 //设置PLL为系统时钟源 31 RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); 32 //判断PLL是否是系统时钟 33 while(RCC_GetSYSCLKSource() != 0x08); 34 } 35 //允许TIM2的时钟 36 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); 37 //允许GPIO的时钟 38 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); 39 }
APB1的分频在STM32_SYSTICK的学习笔记中有详细描述。通过倍频器给定时器时钟的好处是:APB1不但要给TIM2-TIM5提供时钟,还要为其他的外设提供时钟;设置这个倍频器可以保证在其他外设使用较低时钟频率时,TIM2-TIM5仍然可以得到较高的时钟频率。
2.2 计数器模式
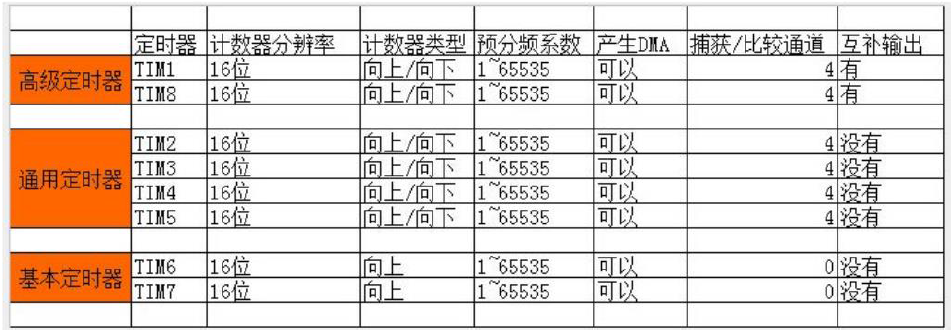
TIM2-TIM5可以由向上计数、向下计数、向上向下双向计数。向上计数模式中,计数器从0计数到自动加载值(TIMx_ARR计数器内容),然后重新从0开始计数并且产生一个计数器溢出事件。在向下模式中,计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。而中央对齐模式(向上/向下计数)是计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
2.3 编程步骤
1. 配置系统时钟;
2. 配置NVIC;
3. 配置GPIO;
4. 配置TIMER;
其中,前3项在前面的笔记中已经给出,在此就不再赘述了。第4项配置TIMER有如下配置:
(1) 利用TIM_DeInit()函数将Timer设置为默认缺省值;
(2) TIM_InternalClockConfig()选择TIMx来设置内部时钟源;
(3) TIM_Perscaler来设置预分频系数;
(4) TIM_ClockDivision来设置时钟分割;
(5) TIM_CounterMode来设置计数器模式;
(6) TIM_Period来设置自动装入的值
(7) TIM_ARRPerloadConfig()来设置是否使用预装载缓冲器
(8) TIM_ITConfig()来开启TIMx的中断
其中(3)-(6)步骤中的参数由TIM_TimerBaseInitTypeDef结构体给出。
步骤(3)中的预分频系数用来确定TIMx所使用的时钟频率,具体计算方法为:CK_INT/(TIM_Perscaler+1)。CK_INT是内部时钟源的频率,是根据2.1中所描述的APB1的倍频器送出的时钟,TIM_Perscaler是用户设定的预分频系数,其值范围是从0 – 65535。
步骤(4)中的时钟分割定义的是在定时器时钟频率(CK_INT)与数字滤波器(ETR,TIx)使用的采样频率之间的分频比例。TIM_ClockDivision的参数如下表:
|
TIM_ClockDivision |
描述 |
二进制值 |
|
TIM_CKD_DIV1 |
tDTS = Tck_tim |
0x00 |
|
TIM_CKD_DIV2 |
tDTS = 2 * Tck_tim |
0x01 |
|
TIM_CKD_DIV4 |
tDTS = 4 * Tck_tim |
0x10 |
数字滤波器(ETR,TIx)是为了将ETR进来的分频后的信号滤波,保证通过信号频率不超过某个限定。
步骤(7)中需要禁止使用预装载缓冲器。当预装载缓冲器被禁止时,写入自动装入的值(TIMx_ARR)的数值会直接传送到对应的影子寄存器;如果使能预加载寄存器,则写入ARR的数值会在更新事件时,才会从预加载寄存器传送到对应的影子寄存器。
ARM中,有的逻辑寄存器在物理上对应2个寄存器,一个是程序员可以写入或读出的寄存器,称为preload register(预装载寄存器),另一个是程序员看不见的、但在操作中真正起作用的寄存器,称为shadow register(影子寄存器);设计preload register和shadow register的好处是,所有真正需要起作用的寄存器(shadow register)可以在同一个时间(发生更新事件时)被更新为所对应的preload register的内容,这样可以保证多个通道的操作能够准确地同步。如果没有shadow register,或者preload register和shadow register是直通的,即软件更新preload register时,同时更新了shadow register,因为软件不可能在一个相同的时刻同时更新多个寄存器,结果造成多个通道的时序不能同步,如果再加上其它因素(例如中断),多个通道的时序关系有可能是不可预知的。
三、定时器代码实例
中断优先级就不贴出来了,自己可以配置下
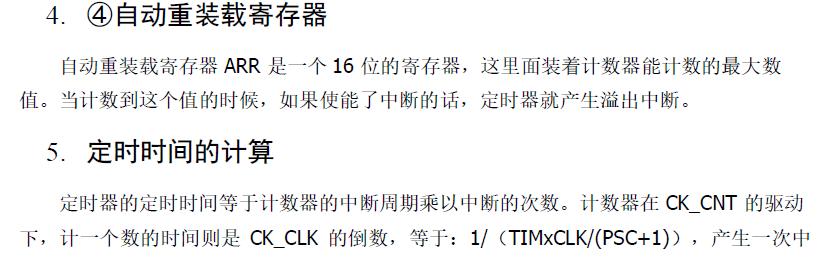
Tout= ((arr+1)*(psc+1))/Tclk;
arr:计数重装值,psc分频数,Tclk系统时钟频率,Tout一个周期的时间。
Tout= ((arr+1)*(psc+1))/Tclk;
3.1、定时器1使用
这里假设APB2时钟是1分频即72MHZ(如果是4分频则为36MHZ [=72MHZ/4x2=36MHZ] )配置,void RCC_Configuration(void)中配置如下代码:
1 //设置高速AHB时钟(APB2)为HCLK时钟 2 RCC_PCLK2Config(RCC_HCLK_Div1);
则这里:APB2的时钟为1分频故出来的APB2时钟还是72MHZ,TIM1对系统时钟APB2(72MHZ)再进行7200分频,然后计数重载初值设置为100,则一个定时周期Tout=(100-1+1)*(7200-1+1)/72,000,000=1/10=0.1s,即100ms为一个计数周期
1 //放到主函数的初始化中初始化 2 void Timer1CountInitial(void) 3 { 4 //定时=36000/72000x2=0.001s=1ms; 5 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 6 /////////////////////////////////////////////////////////////// 7 RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); 8 9 TIM_TimeBaseStructure.TIM_Period = 100-1;//自动重装值(此时改为100ms) 10 TIM_TimeBaseStructure.TIM_Prescaler = 7200-1;//时钟预分频 11 // TIM_TimeBaseStructure.TIM_Prescaler = 36000-1;//时钟预分频 12 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数 13 // TIM_TimeBaseStructure.TIM_Period = 2-1;//自动重装值 14 // TIM_TimeBaseStructure.TIM_Period = 10-1;//自动重装值(此时改为10ms) 15 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频1 16 TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; 17 TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure); 18 19 TIM_ClearFlag(TIM1,TIM_FLAG_Update); 20 TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE); 21 TIM_Cmd(TIM1, ENABLE); 22 } 23 24 25 void TIM1_UP_IRQHandler(void) 26 { 27 //TIM_TimeBaseStructure.TIM_Period = 100-1;//自动重装值(此时进中断的周期为100ms) 28 if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) 29 { 30 //添加行程开关去抖程序 31 if(XingChengTickNum_QuFantan<1000)// 32 { 33 XingChengTickNum_QuFantan++; 34 } 54 } 55 TIM_ClearITPendingBit(TIM1,TIM_IT_Update);58 }
3.2、定时器2使用
Tout= ((arr+1)*(psc+1))/Tclk;
arr:计数重装值,psc分频数,Tclk系统时钟频率,Tout一个周期的时间。
假设APB1时钟是2分频即72MHZ(如果是1分频则为36MHZ)配置,void RCC_Configuration(void)中配置如下代码:
//设置低速AHB时钟(APB1)为HCLK的2分频(TIM2-TIM5输入TIMxCLK频率将为72MHZ/2x2=72MHZ输入)
RCC_PCLK1Config(RCC_HCLK_Div2);
这里:APB1的时钟为分频故出来的APB2时钟还是72MHZ,TIM1是对系统时钟APB2(72MHZ)进行7200分频,
则:Tout=(4-1+1)*(36000-1+1)/72,000,000=4/2,000=2ms
1 void TIM2_Int_Init(void) 2 { 3 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 4 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); 5 6 TIM_DeInit(TIM2); 7 8 TIM_TimeBaseStructure.TIM_Period = 4 - 1;//2000 - 1; 9 TIM_TimeBaseStructure.TIM_Prescaler = (36000 - 1); 10 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; 11 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; 12 13 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); 14 15 TIM_ClearFlag(TIM2, TIM_FLAG_Update); 16 TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); 17 18 TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); 19 20 TIM_Cmd(TIM2, ENABLE); 21 } 22 void TIM2_IRQHandler(void) 23 { 24 25 if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) 26 { 27 interrupt_rtc();//可以使你自己定义的执行函数 28 } 29 TIM_ClearITPendingBit(TIM2, TIM_FLAG_Update); 30 }
3.3、定时器3使用
假设APB1时钟是2分频即72MHZ(如果是1分频则为36MHZ)配置,void RCC_Configuration(void)中配置如下代码:
1 //设置低速AHB时钟(APB1)为HCLK的2分频(TIM2-TIM5输入TIMxCLK频率将为72MHZ/2x2=72MHZ输入) 2 RCC_PCLK1Config(RCC_HCLK_Div2);
TIM3_Int_Init(4-1,36000-1);则:Tout=(4-1+1)*(36000-1+1)/72,000,000=4/2,000=2ms
1 //通用定时器3中断初始化 2 //这里时钟选择为APB1的2倍,而APB1为36M 3 //arr:自动重装值。 4 //psc:时钟预分频数 5 //这里使用的是定时器3! 6 void TIM3_Int_Init(u16 arr,u16 psc) 7 { 8 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 9 NVIC_InitTypeDef NVIC_InitStructure; 10 11 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能 12 13 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms 14 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率 15 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 16 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 17 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 18 19 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断 20 21 NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断 22 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 23 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 24 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 25 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 26 27 TIM_Cmd(TIM3, ENABLE); //使能TIMx外设 28 29 } 30 //定时器3中断服务程序 31 void TIM3_IRQHandler(void) //TIM3中断 32 { 33 if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 34 { 35 TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源 36 LED1=!LED1; 37 } 38 }
3.4、定时器4使用
假设APB1时钟是4分频即72/4=18MHZ(如果是4分频则TIMxCLK=18MHZx2=36MHZ)配置,void RCC_Configuration(void)中配置如下代码:
1 //在void RCC_Configuration(void)中配置APB1时钟4分频或1分频都变为36MHZ 2 //设置低速AHB时钟(APB1)为HCLK的4分频(TIM2-TIM5输入TIMxCLK频率将为72MHZ/4x2=36MHZ输入) 3 RCC_PCLK1Config(RCC_HCLK_Div4);//加入使用4分频
TIM4_Int_Init(4-1,36000-1);
则:Tout=(4-1+1)*(36000-1+1)/36,000,000=4/1,000=4ms
1 void TIM4_Int_Init(u16 arr,u16 psc) 2 { 3 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 4 NVIC_InitTypeDef NVIC_InitStructure; 5 6 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //时钟使能 7 //定时器TIM4初始化 8 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 9 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim 11 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 12 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位 13 TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE ); //使能指定的TIM4中断,允许更新中断 14 15 //中断优先级NVIC设置 16 NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM3中断 17 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 18 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 19 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 20 NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器 21 22 23 TIM_Cmd(TIM4, ENABLE); //使能TIMx 24 } 25 26 27 //定时器4中断服务程序 28 void TIM4_IRQHandler(void) //TIM3中断 29 { 30 if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //检查TIM4更新中断发生与否 31 { 32 TIM_ClearITPendingBit(TIM4, TIM_IT_Update ); //清除TIMx更新中断标志 33 LED0=!LED0; 34 // Get_Angle(); 35 } 36 }
3.5、定时器5使用
假设APB1时钟是1分频即36MHZ(如果是1分频则TimexCLK=36MHZx1=36MHZ)配置,void RCC_Configuration(void)中配置如下代码:
1 //在void RCC_Configuration(void)中配置APB1时钟4分频或1分频都变为36MHZ
2 //设置低速AHB时钟(APB1)为HCLK的4分频(TIM2-TIM5输入TIMxCLK频率将为72MHZ/4x2=36MHZ输入)
3 RCC_PCLK1Config(RCC_HCLK_Div1);//假如使用1分频
TIM5_Int_Init(4-1,36000-1);
则:Tout=(4-1+1)*(36000-1+1)/36,000,000=4/1,000=4ms
1 void TIM5_Init(u16 arr,u16 psc) 2 { 3 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 4 NVIC_InitTypeDef NVIC_InitStructure; 5 6 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //时钟使能 7 8 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms 9 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率 10 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 11 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 12 TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 13 14 TIM_ITConfig(TIM5,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断 15 16 NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; //TIM3中断 17 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 18 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 19 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 20 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 21 22 TIM_Cmd(TIM5, ENABLE); //使能TIMx外? 23 } 24 //定时器5中断服务程序 25 void TIM5_IRQHandler(void) //TIM3中断 26 { 27 if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 28 { 29 TIM_ClearITPendingBit(TIM5, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源 30 LED1=!LED1; 31 } 32 }
.........................................