1.马尔科夫性
系统的下一个状态仅与当前状态有关,与以前的状态无关。
定义:状态st是马尔科夫的,当且仅当P[st+1|st]=P[st+1|s1……st],当前状态st其实是蕴含了所有相关的历史信息,一旦当前信息已知,历史信息会被抛弃。
2.马尔科夫过程
是一个二元组,包括状态机和状态转移概率。从某个状态出发到终止状态的过程链。不存在动作和奖励。
3.马尔科夫决策过程
由元组(S,A,P,R,γ),P为状态转移概率,包含动作;γ为折扣因子,用来计算累计回报。

表示的是在当前s ∈ S状态下,经过a ∈ A作用后,会转移到的状态s’的概率分布情况。
4.几个重要函数
(1)策略函数:策略是指状态到动作的映射。策略的定义用条件概率分布给出。表示给定状态s时,动作集上的分布。强化学习是要找到最优策略,最优指的是总回报最大。

(2)累计回报:给定了策略之后就能计算累计回报了。

(3)状态值函数。由于策略π是随机的,所以求得的累计回报也是随机的。累计回报的期望是确定值,累计回报在状态s处的期望定义为状态值函数。

(4)状态-行为值函数:状态s下,选择行为a的期望值函数。

(5)状态值函数和状态-行为值函数的贝尔曼方程。
①状态值函数
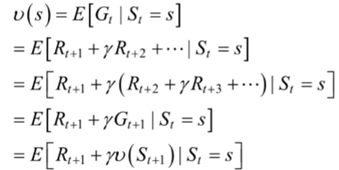
表示当前状态和下一状态的递归关系。
②状态-行为值函数

(6)状态值函数和状态-行为值函数之间的关系
给定当前状态s和当前动作a,在未来遵循策略π,那么系统转向下个状态s'的概率是

π(a|s)表示状态s对应不同的策略,P表示执行动作a后下一步的状态概率,R表示状态s下执行动作a得到的立即奖赏
具体分析步骤如下图:
s→s’整个步骤分成两部分,B和C两部分。B部分为从s状态选择行为a的状态值函数为

C部分给出了状态值函数和状态行为值函数的关系:

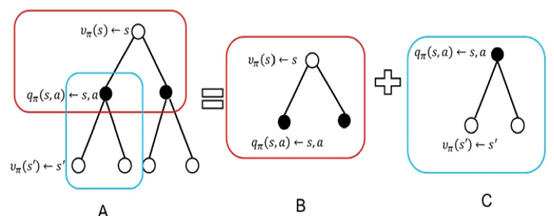
同理,用s’代替s,得到的状态值函数为:

带入上面的状态行为值函数得到函数:

(7)策略π和初始状态s是我们给定的,当前的动作a也是我们给定的,这是q状态行为值函数和V状态值函数的主要区别
(8)计算值函数是为了构建学习算法,从数据中得到最优策略,最优策略对应着最优的状态值函数,所在策略中最大的值函数。
