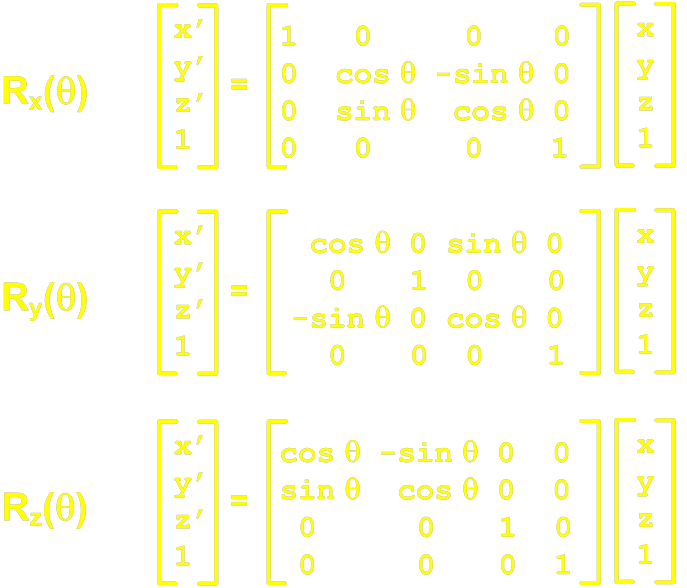
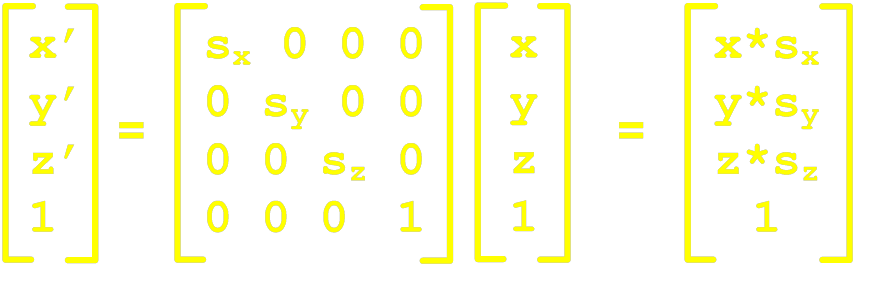
看三个图就清楚了。分别是平移、旋转和缩放的矩阵计算。如果没有额外的第四个量w(也就是齐次坐标),那么这三种变换是无法都使用矩阵乘法来解决的。变换都统一成矩阵乘法之后,就给硬件设计和软件架构带来了巨大的好处。