Sobel边缘检测
// sobel 算法
`timescale 1ns/1ns
module sobel_top(
clk ,
rst_n ,
pre_vs ,
pre_hs ,
pre_en ,
pre_img_Y ,
post_vs ,
post_hs ,
post_en ,
post_img_Y
);
/************************** input and output ******************/
input clk ;
input rst_n ;
input pre_vs ;
input pre_hs ;
input pre_en ;
input [7:0] pre_img_Y ;
output post_vs ;
output post_hs ;
output post_en ;
output [7:0] post_img_Y ;
/************************* main code **************************/
wire [7:0] matrixp11 ;
wire [7:0] matrixp12 ;
wire [7:0] matrixp13 ;
wire [7:0] matrixp21 ;
wire [7:0] matrixp22 ;
wire [7:0] matrixp23 ;
wire [7:0] matrixp31 ;
wire [7:0] matrixp32 ;
wire [7:0] matrixp33 ;
wire matrix_vs ;
wire matrix_hs ;
wire matrix_en ;
Generate_Matrix_3x3_8bit Generate_Matrix_3x3_8bit(
//system
.clk (clk ), //鍍忕礌鏃堕挓鐨勫悓姝ワ紝coms_clk , vga_clk
.rst_n (rst_n ), //澶嶄綅淇″彿
//coms or vga
.pre_vs (pre_vs ), //鍓嶈�鍚屾�
.pre_hs (pre_hs ), //鍓嶅満鍚屾�
.pre_en (pre_en ), //鍓嶆暟鎹�湁鏁
.pre_img_Y (pre_img_Y ), //鏁版嵁鐏板害鍥惧儚
.matrixp11 (matrixp11 ),
.matrixp12 (matrixp12 ),
.matrixp13 (matrixp13 ),
.matrixp21 (matrixp21 ),
.matrixp22 (matrixp22 ),
.matrixp23 (matrixp23 ),
.matrixp31 (matrixp31 ),
.matrixp32 (matrixp32 ),
.matrixp33 (matrixp33 ),
.matrix_vs (matrix_vs ),
.matrix_hs (matrix_hs ),
.matrix_en (matrix_en )
);
//消耗4个时钟
wire [7:0] sobel_data;
sobel sobel(
.clk (clk ),
.rst_n (rst_n ),
.Soble_Threshold(8'd15 ),
.matrixp11 (matrixp11 ),
.matrixp12 (matrixp12 ),
.matrixp13 (matrixp13 ),
.matrixp21 (matrixp21 ),
.matrixp22 (matrixp22 ),
.matrixp23 (matrixp23 ),
.matrixp31 (matrixp31 ),
.matrixp32 (matrixp32 ),
.matrixp33 (matrixp33 ),
.sobel_data (sobel_data )
);
//延迟4个时钟
reg [3:0] matrix_vs_r;
reg [3:0] matrix_hs_r;
reg [3:0] matrix_en_r;
always@(posedge clk or negedge rst_n) begin
if(!rst_n) begin
matrix_vs_r <= 'd0;
matrix_hs_r <= 'd0;
matrix_en_r <= 'd0;
end
else begin
matrix_vs_r <= {matrix_vs_r[2:0],matrix_vs};
matrix_hs_r <= {matrix_hs_r[2:0],matrix_hs};
matrix_en_r <= {matrix_en_r[2:0],matrix_en};
end
end
assign post_vs = matrix_vs_r[3];
assign post_hs = matrix_hs_r[3];
assign post_en = matrix_en_r[3];
assign post_img_Y = post_en ? sobel_data : 8'd0;
endmodule
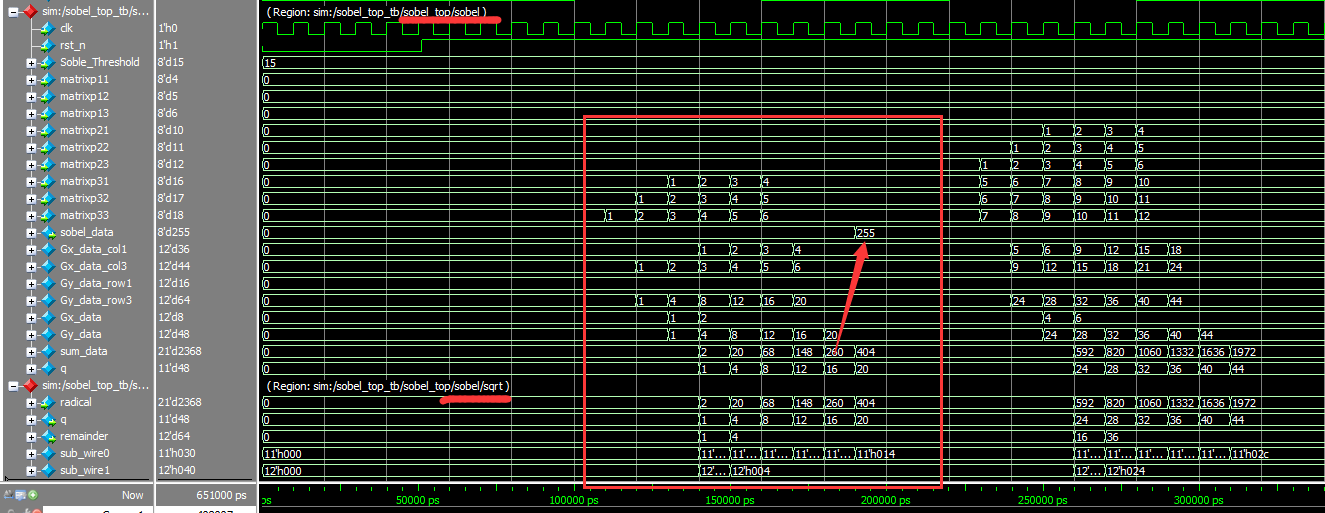
//sobel边缘检测算法 /* [ -1 0 +1 ] [ +1 +2 +1 ] Gx = [ -2 0 +2 ]*A Gy = [ 0 0 0 ] * A [ -1 0 +1 ] [ -1 -2 -1 ] G = sqrt(Gx^2 + Gy^2); G = |Gx| + |Gy| ; */ module sobel ( clk , rst_n , Soble_Threshold, //阈值的选取,可以做一个按键调节 matrixp11 , matrixp12 , matrixp13 , matrixp21 , matrixp22 , matrixp23 , matrixp31 , matrixp32 , matrixp33 , sobel_data ); //************************ input and output *******************// input clk; input rst_n; input [7:0] Soble_Threshold; input [7:0] matrixp11 ; input [7:0] matrixp12 ; input [7:0] matrixp13 ; input [7:0] matrixp21 ; input [7:0] matrixp22 ; input [7:0] matrixp23 ; input [7:0] matrixp31 ; input [7:0] matrixp32 ; input [7:0] matrixp33 ; output reg [7:0] sobel_data; //************************ main code **************************// // [ -1 0 +1 ] [ +1 +2 +1 ] //Gx = [ -2 0 +2 ]*A Gy = [ 0 0 0 ] * A // [ -1 0 +1 ] [ -1 -2 -1 ] // matrixp11*(-1)+matrixp12*(0)+matrixp13*(1), //Gx matrixp21*(-2)+matrixp22*(0)+matrixp23*(2), // matrixp31*(1)+matrixp32*(0) +matrixp33*(1), // matrixp11*(1)+matrixp12*(2)+matrixp13*(1), //Gy matrixp21*(0)+matrixp22*(0)+matrixp23*(0), // matrixp31*(-1)+matrixp32*(-2)+matrixp33*(-1), reg [11:0] Gx_data_col1; reg [11:0] Gx_data_col3; reg [11:0] Gy_data_row1; reg [11:0] Gy_data_row3; //求卷积 第一步 always@(posedge clk or negedge rst_n) begin if(!rst_n) begin Gx_data_col1 <= 'd0; Gx_data_col3 <= 'd0; end else begin Gx_data_col1 <= matrixp11 + (matrixp21 << 1) + matrixp31; Gx_data_col3 <= matrixp13 + (matrixp23 << 1) + matrixp33; end end always@(posedge clk or negedge rst_n) begin if(!rst_n) begin Gy_data_row1 <= 'd0; Gy_data_row3 <= 'd0; end else begin Gy_data_row1 <= matrixp11 + (matrixp12 << 1) + matrixp13; Gy_data_row3 <= matrixp31 + (matrixp32 << 1) + matrixp33; end end //判断大小 第二步 reg [11:0] Gx_data; reg [11:0] Gy_data; always@(posedge clk or negedge rst_n) begin if(!rst_n) Gx_data <= 'd0; else if(Gx_data_col1 >= Gx_data_col3) Gx_data <= Gx_data_col1 - Gx_data_col3; else Gx_data <= Gx_data_col3 - Gx_data_col1; end always@(posedge clk or negedge rst_n) begin if(!rst_n) Gy_data <= 'd0; else if(Gy_data_row1 >= Gy_data_row3) Gy_data <= Gy_data_row1 - Gy_data_row3; else Gy_data <= Gy_data_row3 - Gy_data_row1; end //第三步 求平方 reg [20:0] sum_data; always@(posedge clk or negedge rst_n) begin if(!rst_n) sum_data <= 'd0; else sum_data <= Gx_data*Gx_data + Gy_data*Gy_data; end //第四步 开方 wire [10:0] q; sqrt sqrt( .radical (sum_data), .q (q), .remainder () ); //第五步 取阈值 //White: 24'hFF; Black: 24'h00 //实际情况大于Soble_Threshold为黑色,在后期处理需要注意 always@(posedge clk or negedge rst_n) begin if(!rst_n) sobel_data <= 'd0; else if(q >= Soble_Threshold) sobel_data <= 8'd255; else sobel_data <= 8'd0; end endmodule
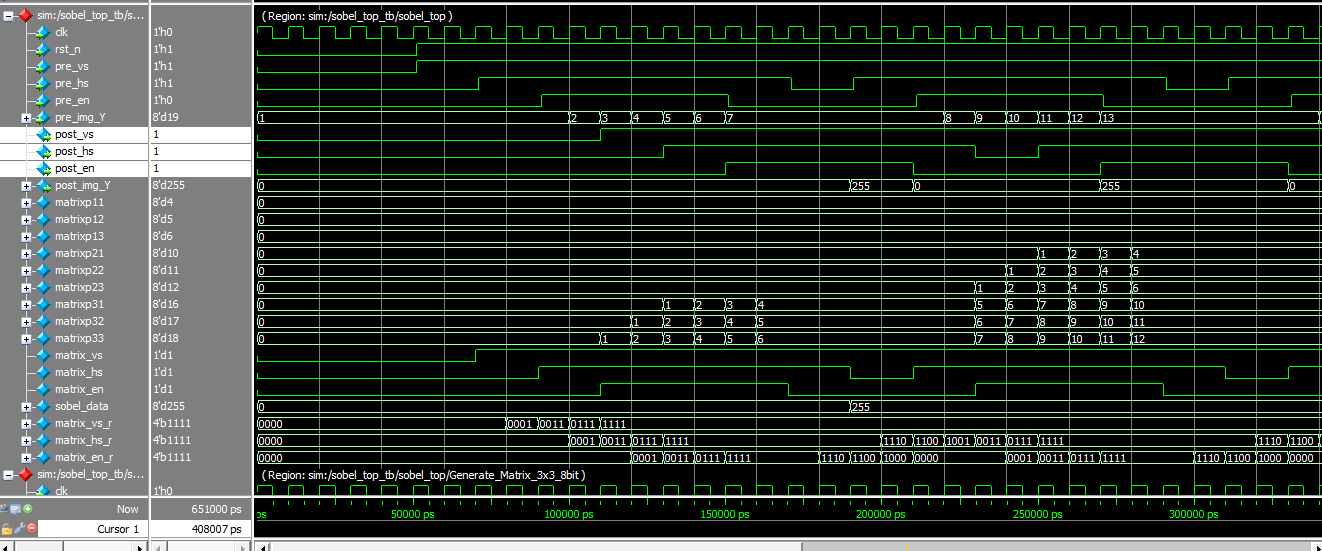
`timescale 1ns/1ns module sobel_top_tb; //system reg clk ; //像素时钟的同步,coms_clk , vga_clk reg rst_n ; //复位信号 //coms or vga reg pre_vs ; //前行同步 reg pre_hs ; //前场同步 reg pre_en ; //前数据有效 reg [7:0] pre_img_Y ; //数据灰度图像 wire post_vs ; //输出行同步 wire post_hs ; //输出场同步 wire post_en ; //输出数据有效 wire [7:0] post_img_Y ; //输出数据灰度图像 initial clk = 1; always #5 clk = ~clk; initial begin rst_n = 0; pre_vs =0 ; pre_hs = 0; pre_en = 0; pre_img_Y = 0; #51; rst_n = 1; pre_vs = 1; #20; pre_hs = 1; #20; pre_en = 1; #60; pre_en = 0; #20; pre_hs = 0; #20; pre_hs = 1; #20; pre_en = 1; #60; pre_en = 0; #20; pre_hs = 0; #20; pre_hs = 1; #20; pre_en = 1; #60; pre_en = 0; #20; pre_hs = 0; #20; pre_hs = 1; #20; pre_en = 1; #60; pre_en = 0; #20; pre_hs = 0; #20; pre_hs = 1; #20; pre_en = 1; #60; pre_en = 0; #20; pre_hs = 0; $stop; end reg [7:0] shiftin; always@(posedge clk or negedge rst_n ) begin if(!rst_n) shiftin <= 'd1; else if(pre_en) shiftin <= shiftin + 1'b1; else shiftin <= shiftin; end sobel_top sobel_top( //system .clk (clk ), //像素时钟的同步,coms_clk , vga_clk .rst_n (rst_n ), //复位信号 //coms or vga .pre_vs (pre_vs ), //前行同步 .pre_hs (pre_hs ), //前场同步 .pre_en (pre_en ), //前数据有效 .pre_img_Y (shiftin ), //数据灰度图像 //output .post_vs (post_vs ), //输出行同步 .post_hs (post_hs ), //输出场同步 .post_en (post_en ), //输出数据有效 .post_img_Y (post_img_Y ) //输出数据灰度图像 ); endmodule
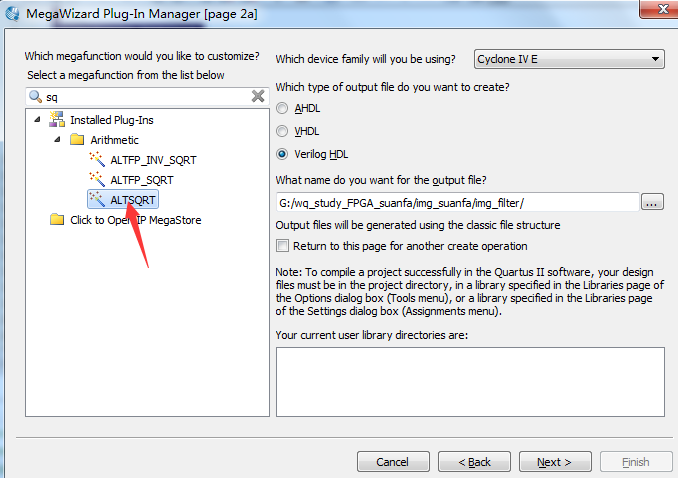
还有一个开方ip核