1. 感知概貌
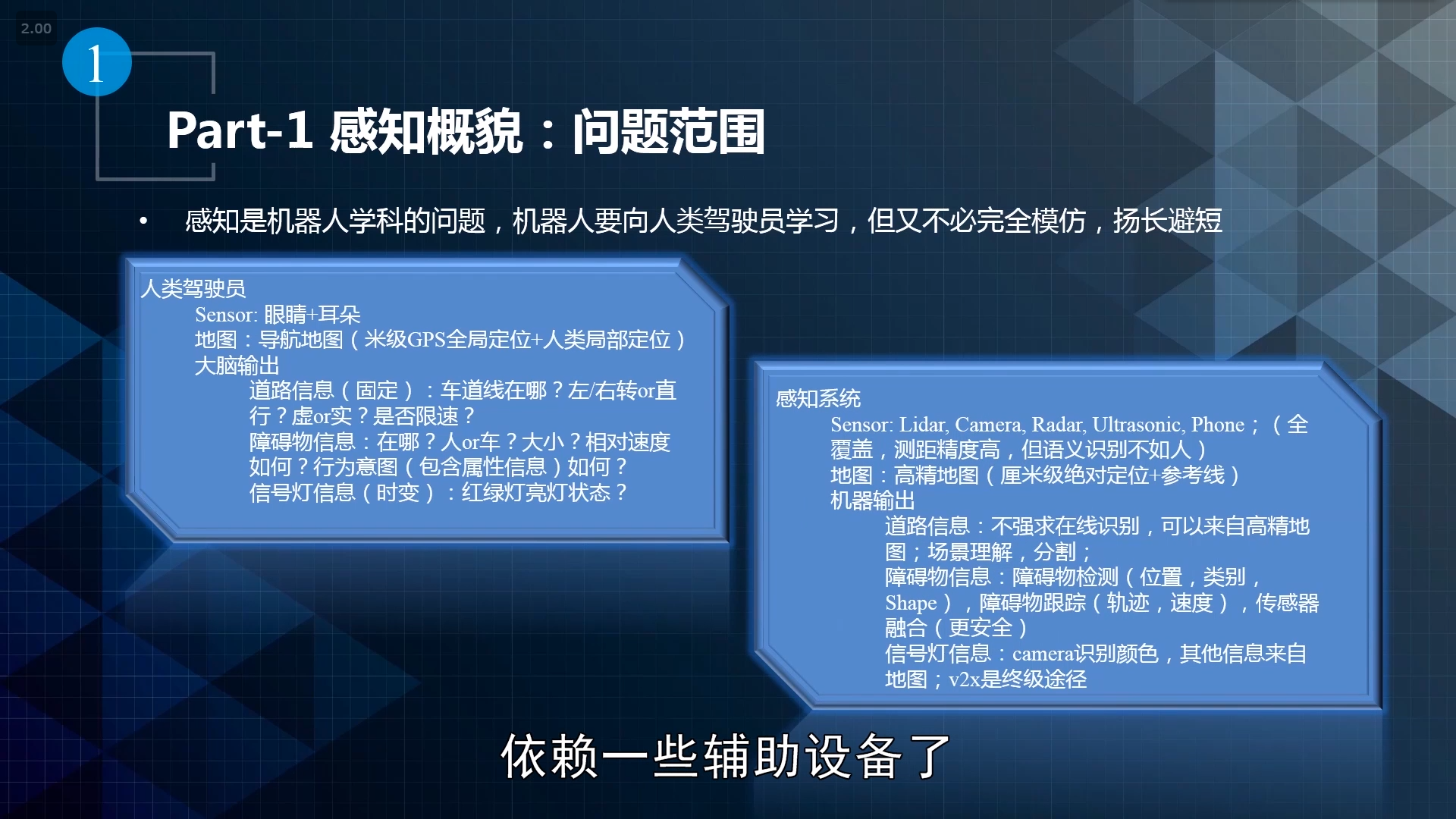
无人车:视觉全覆盖,传感器很多,测距精度很高,感知能力很强,但语义识别能力没有人强。
问题范围:
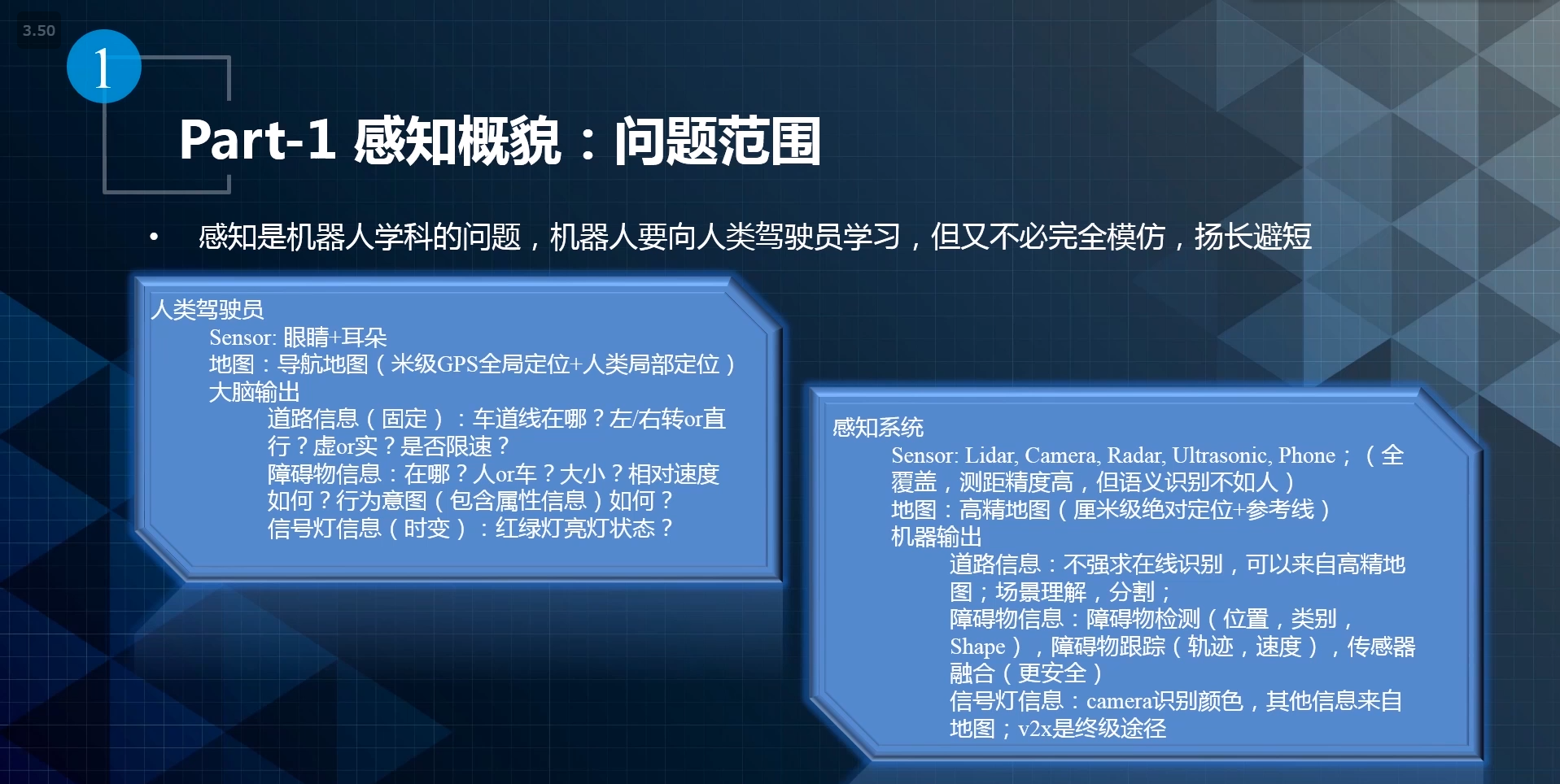
需要高精地图
障碍物信息
形状
传感器融合
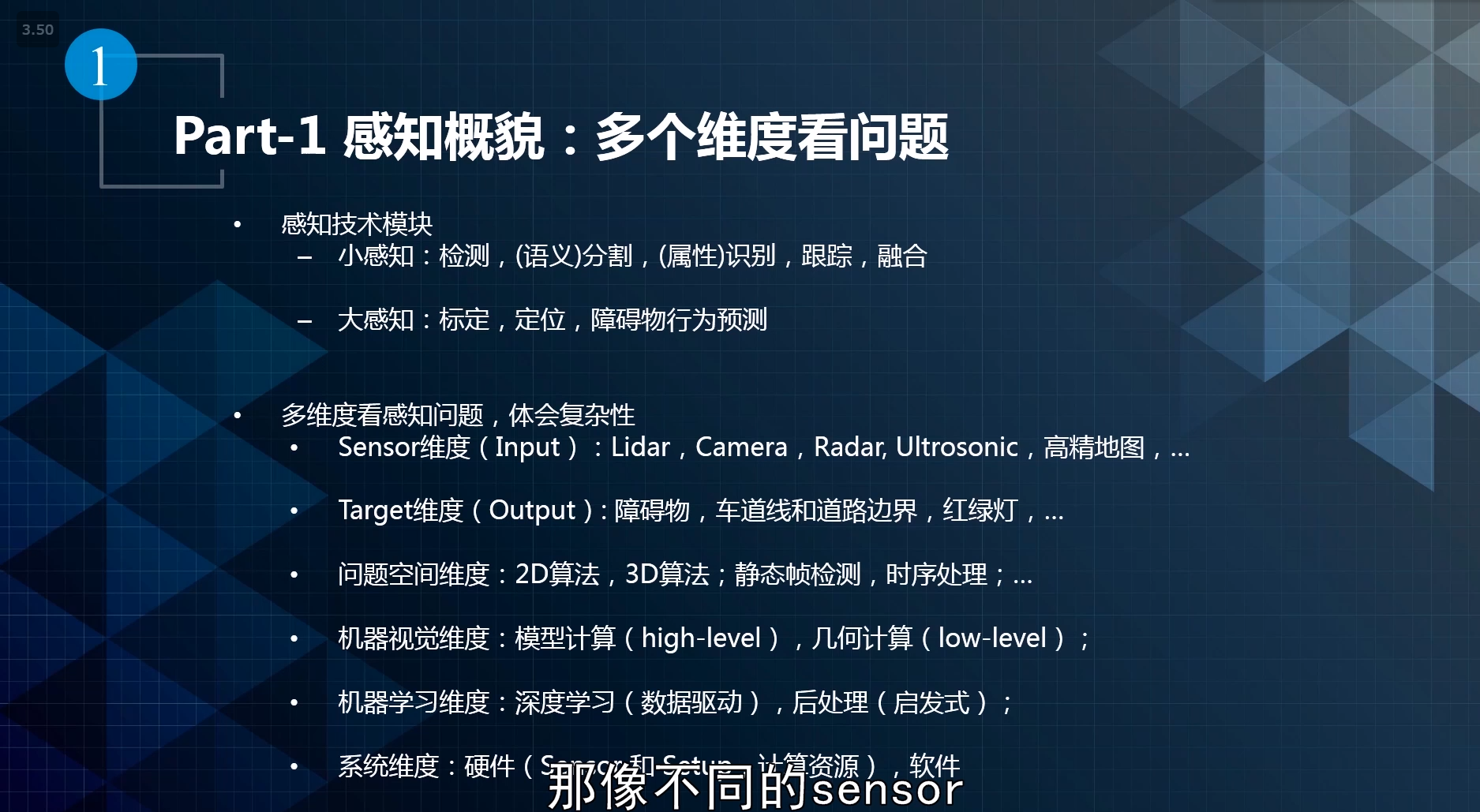
多个维度看问题
2.传感器和标定-1
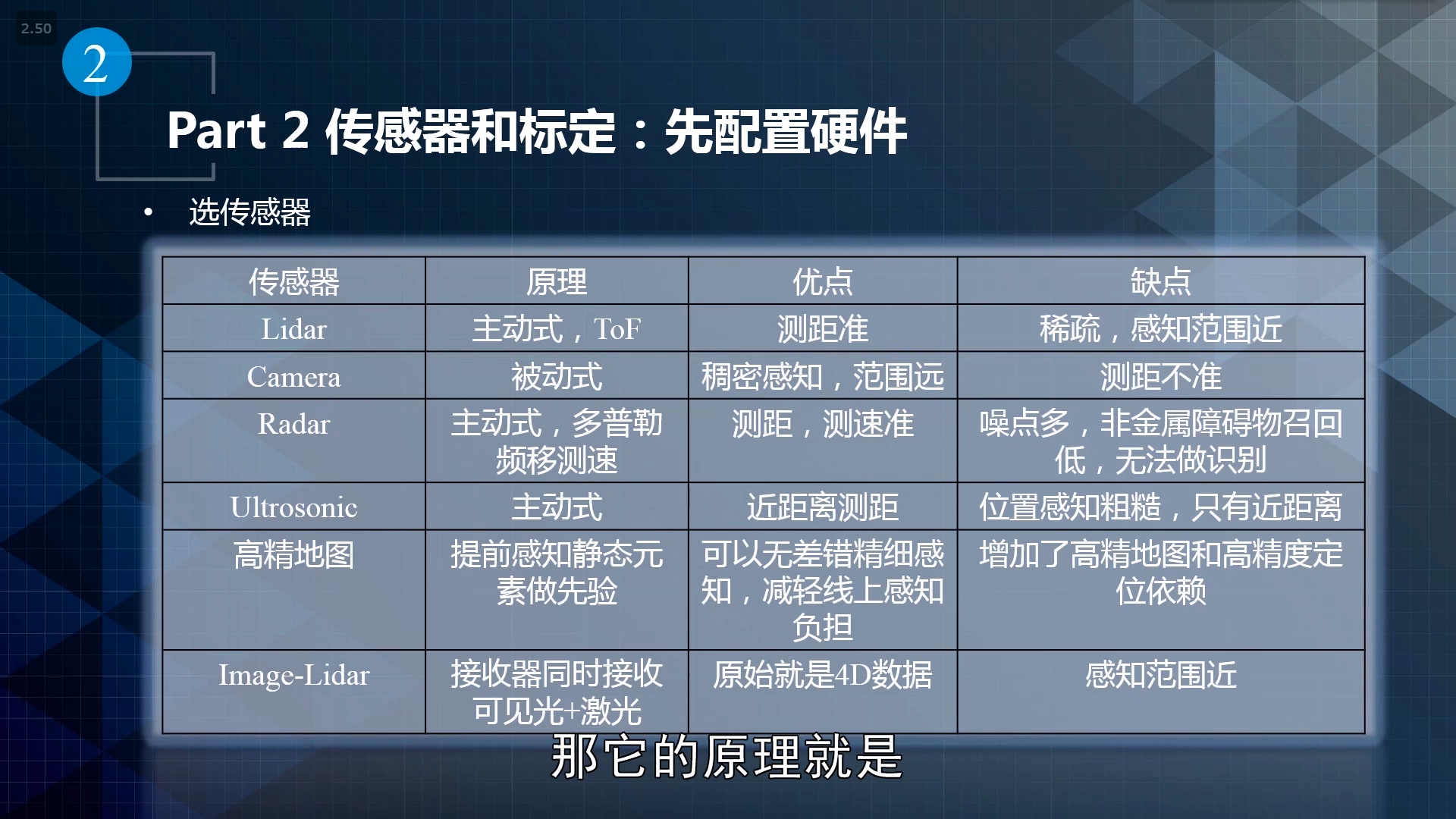
选择传感器:
1.激光雷达:测距非常准,但识别较为困难,功率限制导致不能发射很远
2.camera:受到光照影响大,感知很稠密,距离很远,但测距不准
3.雷达毫米波原理:测速测距都比较准,噪点很多,对于非金属感知较低,无法识别。
4.超声波:近距离,一般用于停车
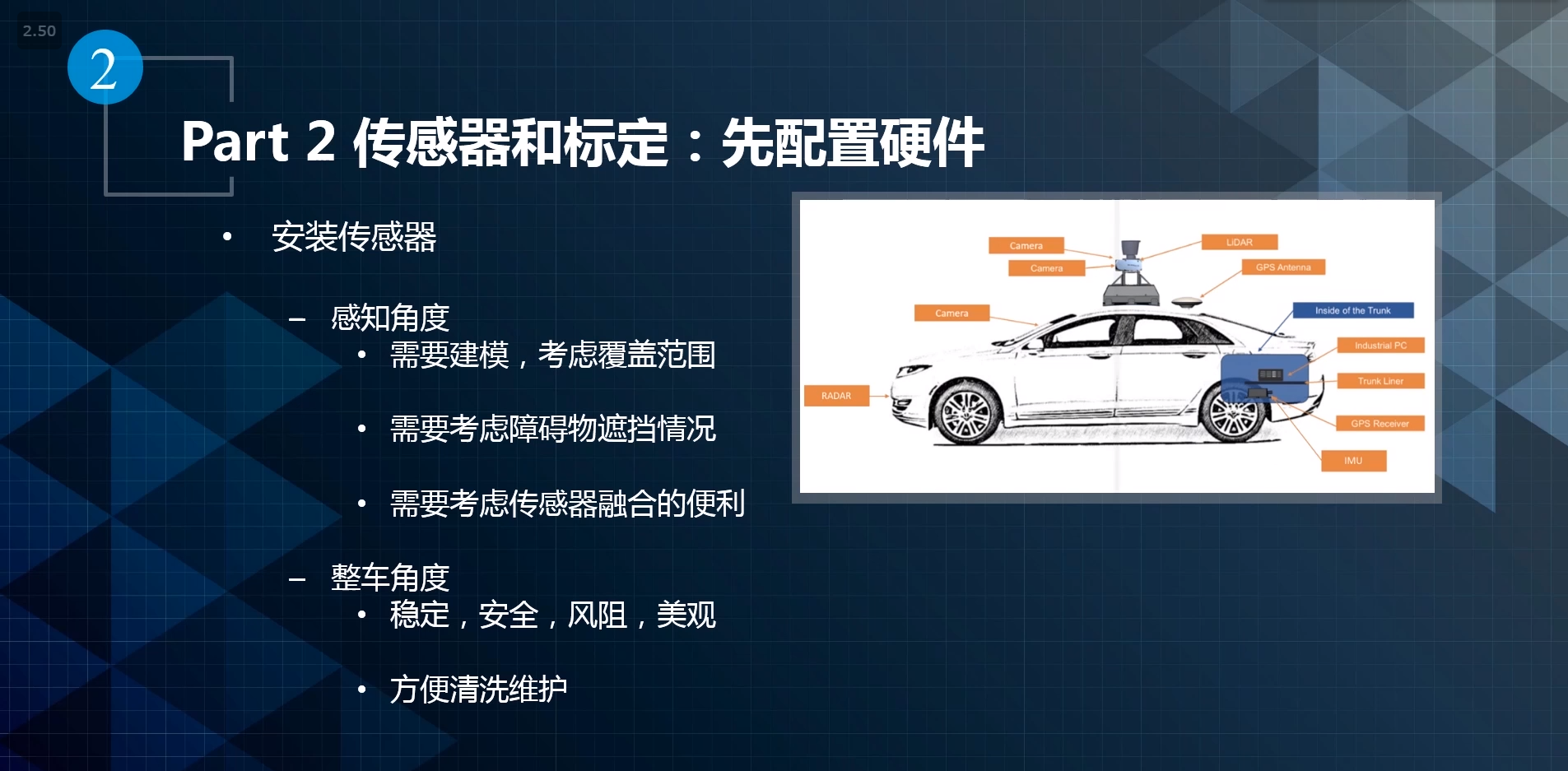
配置:
考虑:
1.障碍物遮挡
2.融合结果输出
3.稳定、安全、风阻、美观
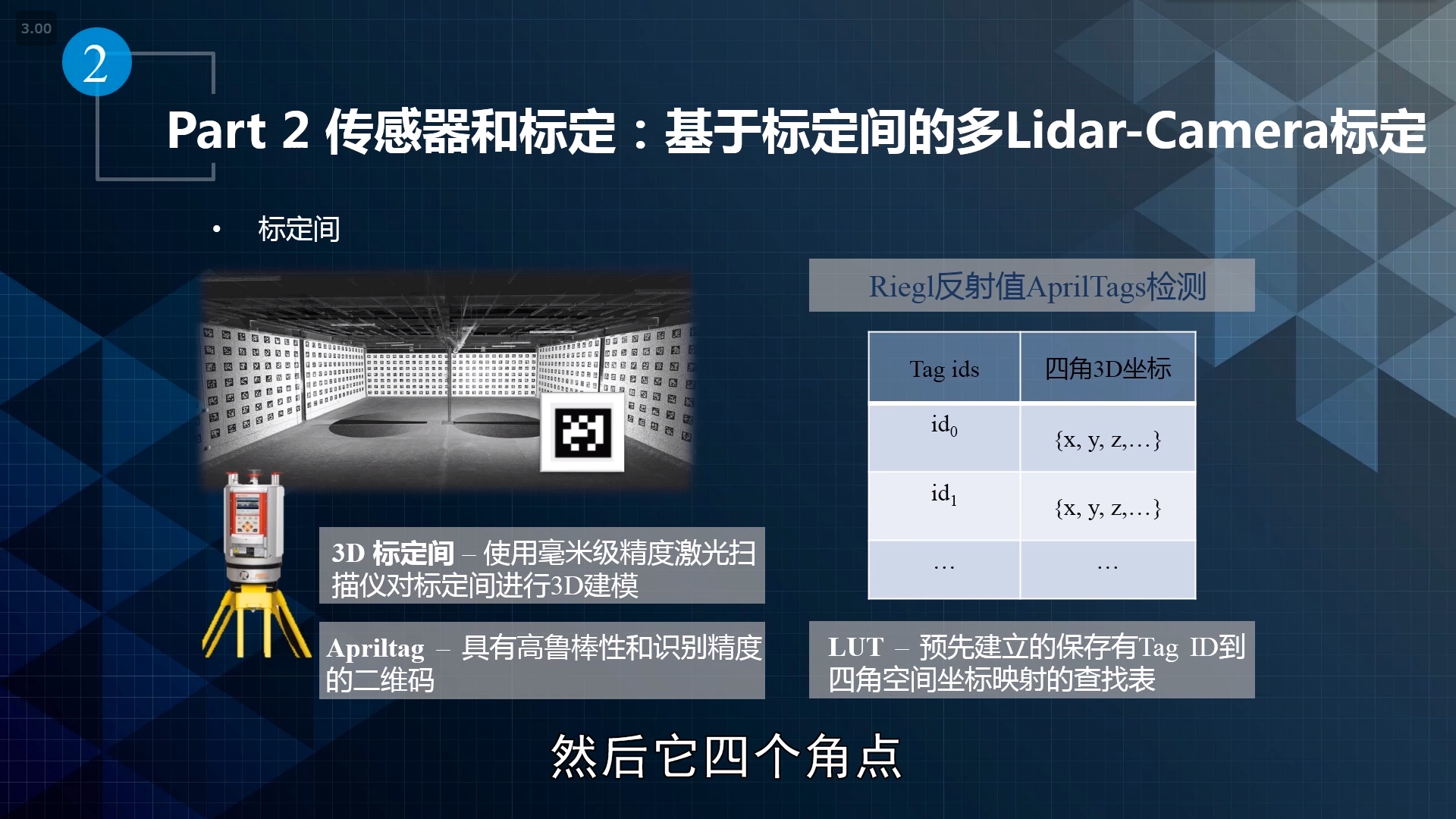
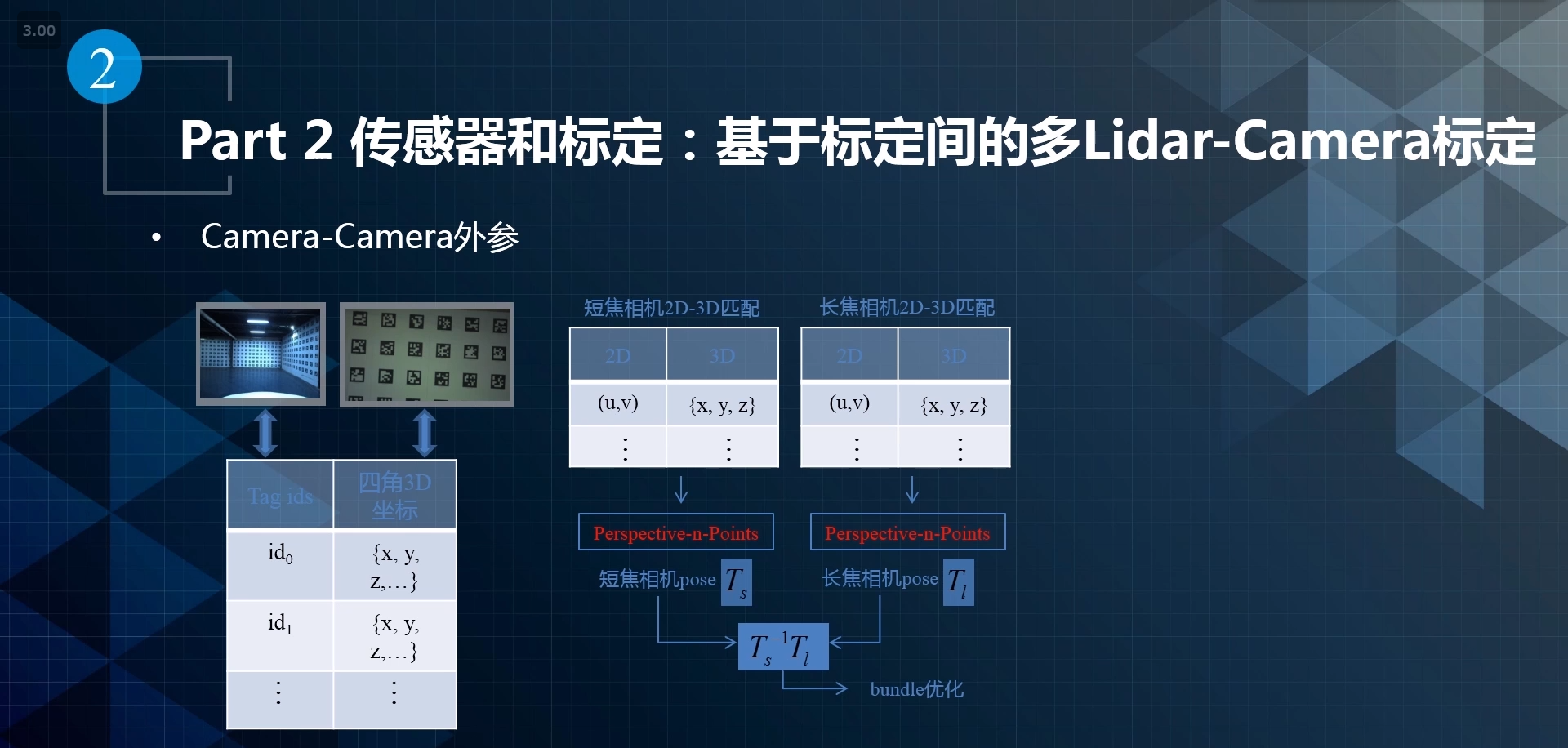
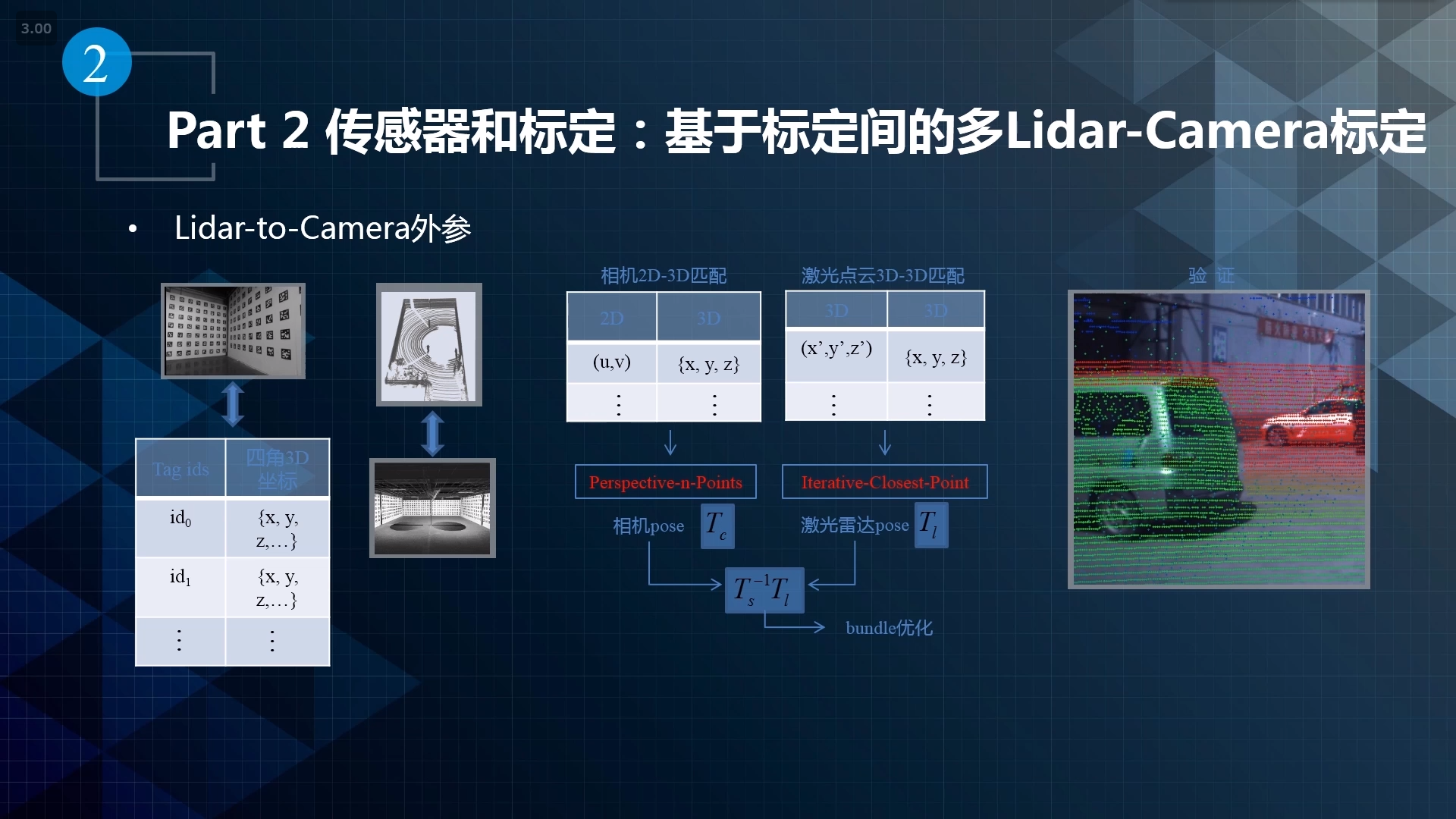
3.传感器和标定-2
标定:
传感器标定的核心问题:将不同传感器的数据在同一个坐标系中显示
基于标定间的多lidar-carema标定: