学习机器学习的同学在学习过程中会经常遇到一个问题,那就是对目标函数进行求微分,线性回归这类简单的就不说、复杂的如神经网络类那些求导过程的酸爽。像我还是那种比较粗心的人往往有十导九错,所以说自动求导就十分有必要了,本文主要介绍几种求导的方式。假设我们的函数为(f(x,y)=x^2y+y+2),目标是求出偏导(frac{partial{f}}{partial{x}})和(frac{partial{f}}{partial{y}})。求导的方式主要分为以下几种
手动求导法(Manual Differentiation)###
首先准备一张纸和一支笔,根据上学时候学到的求导法则,开始计算。最终得到的结果
(frac{partial{f}}{partial{x}}=2xy)
(frac{partial{f}}{partial{y}}=x^2+1)
上面这个小例子比较简单,口算即可得到答案,但如果方程比较复杂那就难说了。幸好有自动求导的方法,例如符号求导方法。
符号求解法(Symbolic Differentiation)###
符号求导是根据一些求导法则,进行求导。例如我们大学高数学习的((uv)prime=u'v+v'u),((u+v)'=u'+v'),((frac{u}{v})'=frac{u'v-v'u}{v^2})等等,下图是(g(x,y)=5+xy)的符号求导工作流程。
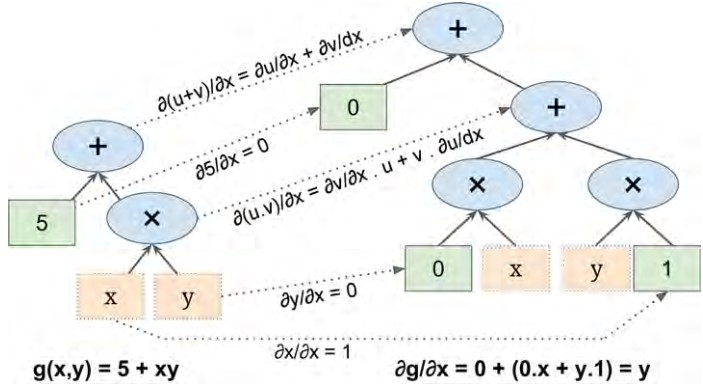
原公式在图的左边,求导公式在图的右半部分,求导的过程是先求叶子节点,自下向上。最终对节点进行见之得到求导结果(frac{partial{g}}{partial{x}}=y),这个例子固然简单,但是对于一个更复杂的公式,那么求导符号图将会十分的庞大(表达式膨胀),另外对于一些变化的公式(硬代码)这种方法就无能为力了:
def fun(a,b):
z=0
for i in range(100):
z = a * np.cos(z + i) + z * np.sin(b - i)
return z
数值求导法(Numerical Differentiation)###
导数的定义是当自变量的增量趋于零时,因变量的增量与自变量的增量之商的极限。
其中(varepsilon)是一个无穷小的数,所以我们可以计算在x=3,y=4这一点对x的偏导数,(f'(x=3,y)=frac{f(3+varepsilon,4)-f(3,4)}{varepsilon}),对应的代码如下:
def f(x, y):
return x**2*y + y + 2
def derivative(f, x, y, x_eps, y_eps):
return (f(x + x_eps, y + y_eps) - f(x, y)) / (x_eps + y_eps)
df_dx = derivative(f, 3, 4, 0.00001, 0)
df_dy = derivative(f, 3, 4, 0, 0.00001)
>>print(df_dx)
24.000039999805264
>>print(df_dy)
10.000000000331966
通过上面的结果我们发现,得出的结果不是十分的精确,并且在对x和y求偏导的整个过程中,至少需要计算3次(f()),也就是说如果有1000个参数,那么至少需要计算1001次(f()),在神经网络中,参数巨多,这样计算效率会比较差。不过这种方法常被用到进行检验得到的求导结果是否正确。
前向自动求导法(Forward-Mode Autodiff)###
前向求导是依赖于数值求导和符号求导的一种求解方法,给定公式(a+{varepsilon}b),这种被称作dual number,其中a和b是实数,(varepsilon)是一个无穷小的数,并且({varepsilon}^2=0),举个栗子,(42 + 24varepsilon),我们可以把它看成42.00000000...24的数值.我们可以通过这种方法(42.0,24.0)来表示,dual number满足以下的运算法则:
- 1.(lambda(a+bvarepsilon) = avarepsilon + b{lambda}varepsilon)
- 2.((a+bvarepsilon)+(c+dvarepsilon) = (a+c)+(b+d)varepsilon)
- 3.((a+bvarepsilon) imes(c+dvarepsilon) = ac+(ad+bc)varepsilon+(bd){varepsilon}^2=ac+(ad+bc)varepsilon)
还有一点就是(h(a+bvarepsilon)=h(a)+b{ imes}h'(a)varepsilon)。
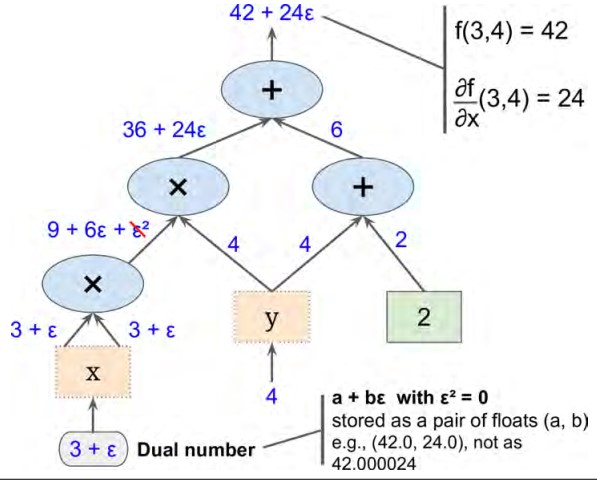
上图给出了使用前向求导方法计算出(f(x,y))在x=3,y=4这一点(frac{partial{f}}{partial{x}}(3,4))的偏导,同理求出(frac{partial{f}}{partial{y}}(3,4)),图中的思路很清晰就不赘述。前向求导方法相对数值求导来说准确率较高,当和数值求导方法一样如果参数过多的时候效率会比较差,因为这种方法需要遍历整个图。
逆向自动求导法(Reverse-Mode Atuodiff)###
TensorFlow采用的是逆向自动求导方法,该方法首先正向遍历整个图,计算出每个节点的值;然后逆向(从上到下)遍历整个图,计算出节点的偏导值,步骤如下图所示;节点内蓝色的数值表示正向计算出的结果,为了方便表达,我们从下到上,从左到右依次标注为(n_1)到(n_7),可以看到最后的值(n_7)(顶部节点)为42。
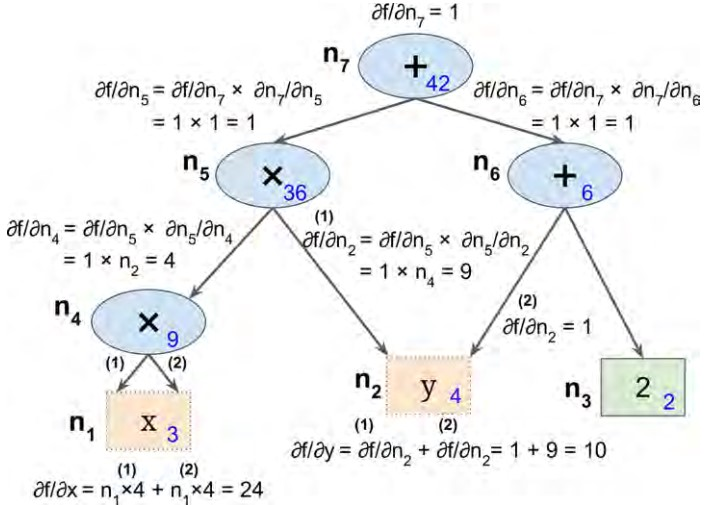
在逆向求导过程中使用链式求导方法:
(frac{partial{f}}{partial{x}}=frac{partial{f}}{partial{n_i}}{ imes}frac{partial{n_i}}{partial{x}})
先看节点(n_7),作为输出节点(f=n_7),所以导数值为(frac{partial{f}}{partial{n_7}}=1),
接着向下计算(n_5),(frac{partial{f}}{partial{n_5}}=frac{partial{f}}{partial{n_7}}{ imes}frac{partial{n_7}}{partial{n_5}}),上一步计算出(frac{partial{f}}{partial{n_7}}=1),现在我们只需要计算(frac{partial{n_7}}{partial{n_5}}),从图中我们知道(n_7=n_5+n_6),可以得出(frac{partial{f}}{partial{x}}=1)。所以(frac{partial{f}}{partial{n_5}}=1),接下来的步骤可以看上面的图,这里就不赘述了。
逆向自动求导法这种方法十分强大且准确率较高,尤其是有却多的输入。这种发方法仅需要正向和逆向遍历一次即可,这种方法更强大的地方在于能够解决符号求解法中硬代码的问题。