zoukankan
html css js c++ java
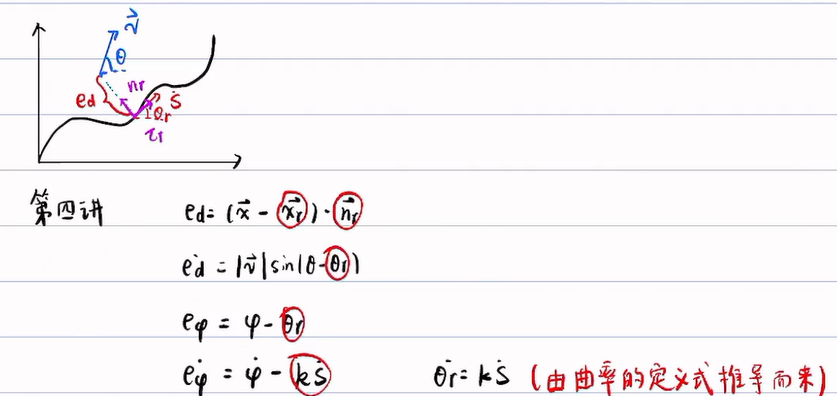
自动驾驶控制算法第七讲 离散规划轨迹的误差计算
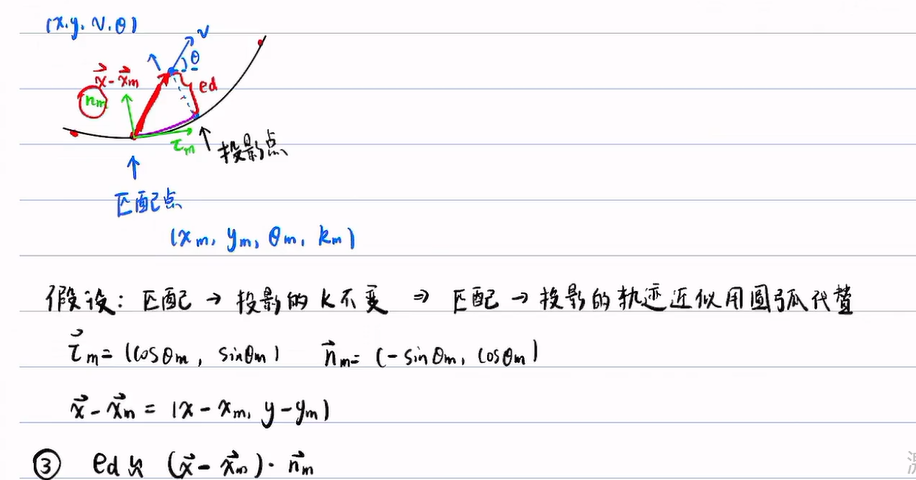
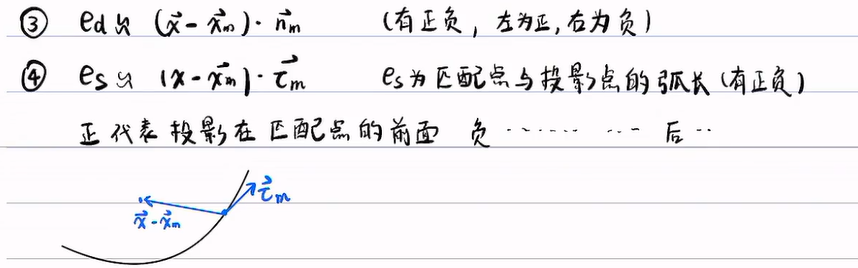
ed约等于这块使用的高中求投影公式(x向量 - xr向量)点乘 nm向量 除以nm的模长,就是x向量 - xr向量在nm方向上的投影,nm向量为单位向量所以nm的模长为1
查看全文
相关阅读:
python,可变参数
python process,queue
python 进程池Pool
python 中的set与list,tuple
python 元组tuple
深夜装ubuntu
python中的协程
python Queue在两个地方
(转载)Spring mvc中@RequestMapping 6个基本用法小结
数据库jdbc连接--【DRP】
原文地址:https://www.cnblogs.com/zhj868/p/14288261.html
最新文章
Apache服务器的下载与安装
SKStoreProductViewController的使用,我们想看app的信息或者下载,又不想跳转appstore的方法
mobileconfig文件
WKWebView的使用
使用cocoapods使用SDWebImage加载webp图片或者iOS 安装libwebp 0.6.1遇到Error installing libwebp
Block使用总结
iOS 使用GCD控制网络请求顺序
iOS多线程详解
GCD的使用总结
lipo 报错 error:can't map input file: xxxFramework.framework/ (Invalid argument)
热门文章
九、装配bean--通过properties文件注入值
八、装配bean--自动装配
七、装配bean--通过构造函数给bean注入值
七、装配bean--内部bean和bean之间的继承
六、装配bean--给集合装配值
五、bean的生命周期
四、spring理论知识和ApplicationContextUtil
三、bean的作用域
二、bean容器和加载bean
二、配置你的bean
Copyright © 2011-2022 走看看