1. 卡尔曼滤波器介绍
卡尔曼滤波器的介绍, 见 Wiki
这篇文章主要是翻译了 Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation
感谢原作者。
如果叙述有误,欢迎指正!
2. 基本模型
2.1 系统模型
卡尔曼滤波模型假设k时刻的真实状态是从(k − 1)时刻的状态演化而来,符合下式:
 (1)
(1)
- Fk 是作用在 Xk−1 上的状态变换模型(/矩阵/矢量)。
- Bk 是作用在控制器向量uk上的输入-控制模型。
- Wk 是过程噪声,并假定其符合均值为零,协方差矩阵为Qk的多元正态分布。
 (2)
(2)
2.2 测量模型
时刻k,对真实状态 xk的一个测量zk满足下式:
 (3)
(3)
其中Hk是观测模型,它把真实状态空间映射成观测空间,vk 是观测噪声,其均值为零,协方差矩阵为Rk,且服从正态分布。
 (4)
(4)
初始状态以及每一时刻的噪声{x0, w1, ..., wk, v1 ... vk} 都认为是互相独立的.
卡尔曼滤波要做的是:
已知:
-
系统的初始状态 x0
-
每个时间的测量 Z
-
系统模型和测量模型
求解:
状态x随着时间变化而产生的值
3. 预测与更新
3.1 预测方程
预测是这样一个问题:
已知:
- 上一个状态的更新值
- 上一个状态的更新值和真实值之间的误差
求解:
- 这一个状态的预测值
- 这一个状态的预测值和真实值之间的误差
过程包括两个方面:
一、由上一个更新值 Xk-1|k-1 预测这一个预测值 Xk|k-1
二、由上一个更新值和真实值之间的误差 Pk-1|k-1 预测下一个预测值和真实值之间的误差 Pk|k-1
具体来说,就是以下两个方程。
 (预测状态) (5)
(预测状态) (5)
 (预测估计协方差矩阵) (6)
(预测估计协方差矩阵) (6)
这里:
Xk-1|k-1 这种记法代表的是上一次的更新值,后面一个 k-1可以看做 Zk-1, 也就是上一次经过对比Zk-1(实际就是更新)之后所估计出的状态Xk-1。
Xk|k-1 这种记法代表这一次的预测值, 同理于刚才的介绍, 经过上一次Zk-1之后所估计出的状态Xk。
预测公式-预测状态
也就是公式(5), 可以直接由系统模型导出。
预测公式-协方差矩阵:
P代表着估计误差的协方差,代表着一种 confidence ,比如先验估计误差(预测值与真实值之间误差)的协方差

注:
方差有两种形式


协方差的定义:

如果说方差是用来衡量一个样本中,样本值的偏离程度的话。协方差就是用来衡量两个样本之间的相关性有多少,也就是一个样本的值的偏离程度,会对另外一个样本的值偏离产生多大的影响,协方差是可以用来计算相关系数的,相关系数P=Cov(a.b)/Sa*Sb, Cov(a.b)是协方差, Sa Sb 分别是样本标准差。【可以参考另一篇博客《理解协方差》】
cov(x,y)
= E( (x-u)(y-v)' )
= E(xy' - xv' - uy' + uv')
= E(xy') - E(xv') - E(uy') + E(uv')
= E(xy') - uv' - uv' + uv'
= E(xy') - uv'
比较(5)和(1), 相减:

由于 状态估计误差 和 系统噪声 是不相关的
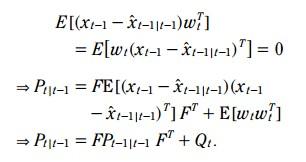
注:
如果随机变量 x和y是不相关的, 那么
Cov(x,y) = 0
=> E( (x-ex)(y-ey)' ) = 0
=> E(xy') - ex*ey' = 0
如果 ex 和ey为0 => E(x,y') = 0 就像上面的情况, 误差和噪声都服从正态分布,所以期望都是0 .
独立的充要条件:P(xy) = P(x)P(y)
3.2 更新方程
更新过程实际上就是一下问题:
已知:
- 由上一个更新值得到的当前的预测值。
- 当前的观测值
- 观测模型
求解:
- 融合了预测值和观测的更新值
- 由预测值的估计误差得到更新值的估计误差
更新方程如下:


其中K称为kalman增益, 就像一个补偿,决定着预测值应该变化多少幅度,才能变成更新值。

先看一个简单的例子,从这个例子中来推导出这三个方程。
3.3 简单的例子
3.3.1 举例
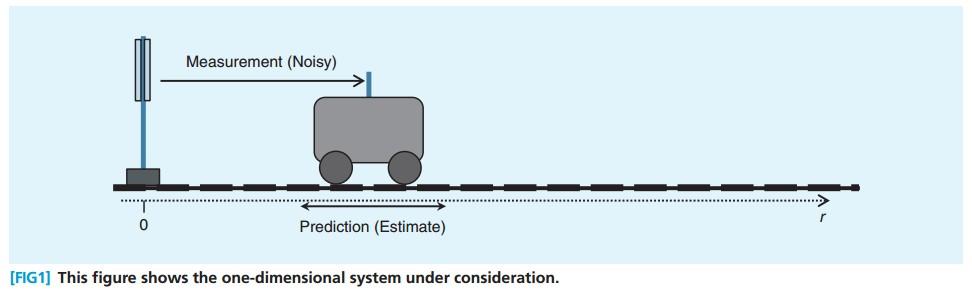
有一个直线轨道, 轨道上有一个火车,从火车站出发, 在t时刻,火车想要知道自己距离火车站的位置,可以有两个信息来源:
- 根据 t-1时刻的状态信息,以及一些控制信息来推断, 状态包括 t-1时刻的位置、速度等, 控制信息包括司机刹车、加速等等。
- 根据 t时刻的测量数据来推断, 这里假设车上有一个声波发射器,可以探测到发射到火车站需要多少时间,进而得到离车站的距离。
要想得到一个比较好的结果,显然不能只依靠某一种方法来推断,而 Kalman Filter的方法是:
-
首先, 利用t-1时刻进行推断, 这一步叫预测。
-
然后, 利用t时刻的measurement 也可以推断, 使用这个推断对预测进行校正, 这一步叫更新。

3.3.2 火车位置 - 预测
t=0的时候, 火车状态如 Figure.2 ,这时候, 火车的位置是比较准确的。
t=1的时候, 火车的预测状态如 Figure.3 可以看到, 位置的方差变大了。
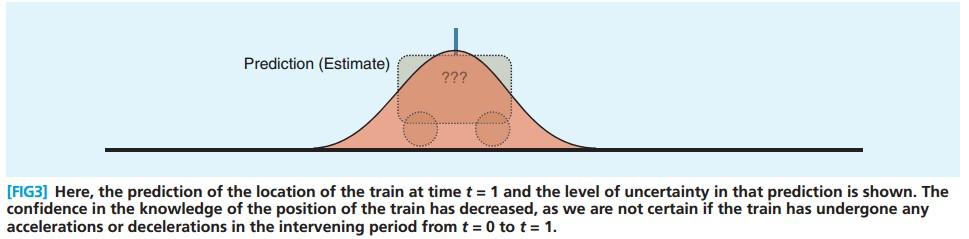
火车的预测主要遵循 式(1),而预测的方差在不断变大,也就是说预测的准确度在下降, 这是由累积误差 w 导致的。
3.3.3 火车位置 - 测量
t=1 的时候,我们还有 measurement ,同样可以推断火车的位置,见下图中的蓝色的pdf
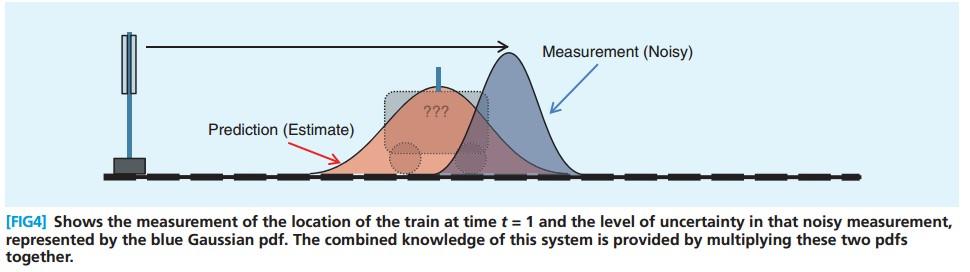
3.3.4 火车位置 - 更新
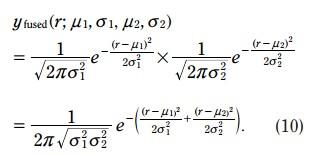
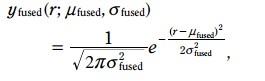
将两个pdf相乘,得到下图中的绿色pdf, 绿色pdf中较高的位置, 意味着预测和测量对这个位置都比较支持。
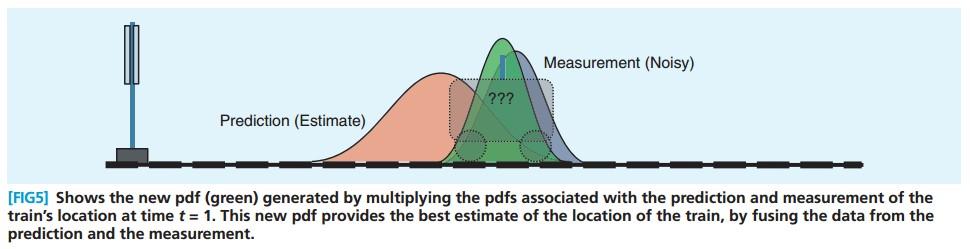
这里有一个高斯分布的一个重要性质就是,两个高斯分布的乘积还是高斯分布。
This is critical as it permits an endless number of Gaussian pdfs to be multiplied over time, but the resulting
function does not increase in complexity or number of terms; after each
time epoch the new pdf is fully represented by a Gaussian function. This
is the key to the elegant recursive properties of the Kalman filter。
3.3.5 推导更新方程
红色的pdf是预测的火车位置, 方程如下:
蓝色的pdf是测量的火车位置, 方程如下:
绿色的pdf二者融合的或者位置, 方程如下:
写成如下形式:
这里:
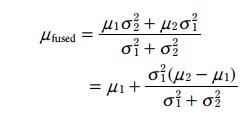
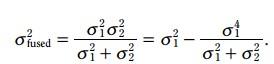
这两个式子,就是kalman滤波的更新方程
但是,这只是一个很特殊的例子,因为这里假设预测和测量都是采用同样的坐标系
更现实的情况是二者需要统一到一个 domain 中
比如上面所举的例子中:
预测的时候, 预测值是用米作为单位的。
但是当测量的时候, 测量得到的值是用声波经过的秒数作为单位的。
必须先要把两个量统一到同一个domain才能进行融合。
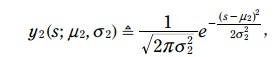
比如上式子中, y2 (measurement)实际是声波传递时间的一个正态分布,也就是说单位是秒。
一般做法是把
预测值 => 测量值
y1就变成:
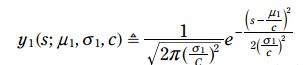
y2不变:
这样两个坐标系都在 mesaurement domain 了。
两个pdf所在坐标系的横轴都是表示时间,而且以秒为单位了。
`
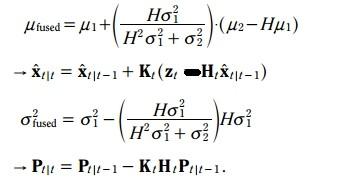
统一domain之后,更新方程就有了如下形式
3.3.5.1 期望更新方程:
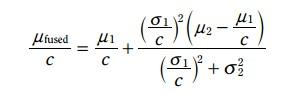
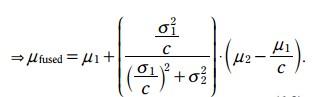
将
H = 1/c
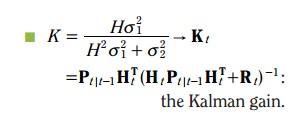
K = 

这里的H就相当于观测方程中的H, K就是卡尔曼增益。
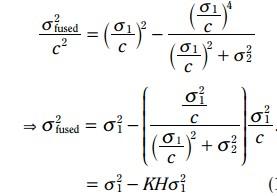
3.3.5.2 方差更新方程:
类似地, 融合之后的方差更新变成了
4. 总结
各个变量对应的情况如下:
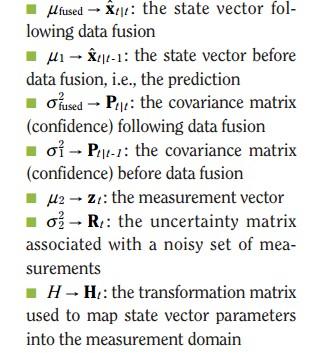
最终的更新方程
5. 实现
Talk is cheap, show me the code.
%本例子从百度文库中得到, 稍加注释
clear
N=200;%取200个数
%% 生成噪声数据 计算噪声方差
w=randn(1,N); %产生一个1×N的行向量,第一个数为0,w为过程噪声(其和后边的v在卡尔曼理论里均为高斯白噪声)
w(1)=0;
Q=var(w); % R、Q分别为过程噪声和测量噪声的协方差(此方程的状态只有一维,方差与协方差相同)
v=randn(1,N);%测量噪声
R=var(v);
%% 计算真实状态
x_true(1)=0;%状态x_true初始值
A=1;%a为状态转移阵,此程序简单起见取1
for k=2:N
x_true(k)=A*x_true(k-1)+w(k-1); %系统状态方程,k时刻的状态等于k-1时刻状态乘以状态转移阵加噪声(此处忽略了系统的控制量)
end
%% 由真实状态得到测量数据, 测量数据才是能被用来计算的数据, 其他都是不可见的
H=0.2;
z=H*x_true+v;%量测方差,c为量测矩阵,同a简化取为一个数
%% 开始 预测-更新过程
% x_predict: 预测过程得到的x
% x_update:更新过程得到的x
% P_predict:预测过程得到的P
% P_update:更新过程得到的P
%初始化误差 和 初始位置
x_update(1)=x_true(1);%s(1)表示为初始最优化估计
P_update(1)=0;%初始最优化估计协方差
for t=2:N
%-----1. 预测-----
%-----1.1 预测状态-----
x_predict(t) = A*x_update(t-1); %没有控制变量
%-----1.2 预测误差协方差-----
P_predict(t)=A*P_update(t-1)*A'+Q;%p1为一步估计的协方差,此式从t-1时刻最优化估计s的协方差得到t-1时刻到t时刻一步估计的协方差
%-----2. 更新-----
%-----2.1 计算卡尔曼增益-----
K(t)=H*P_predict(t) / (H*P_predict(t)*H'+R);%b为卡尔曼增益,其意义表示为状态误差的协方差与量测误差的协方差之比(个人见解)
%-----2.2 更新状态-----
x_update(t)=x_predict(t) + K(t) * (z(t)-H*x_predict(t));%Y(t)-a*c*s(t-1)称之为新息,是观测值与一步估计得到的观测值之差,此式由上一时刻状态的最优化估计s(t-1)得到当前时刻的最优化估计s(t)
%-----2.3 更新误差协方差-----
P_update(t)=P_predict(t) - H*K(t)*P_predict(t);%此式由一步估计的协方差得到此时刻最优化估计的协方差
end
%% plot
%作图,红色为卡尔曼滤波,绿色为量测,蓝色为状态
%kalman滤波的作用就是 由绿色的波形得到红色的波形, 使之尽量接近蓝色的真实状态。
t=1:N;
plot(t,x_update,'r',t,z,'g',t,x_true,'b');
6. Reference
Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation