原理就是:手机通过蓝牙传输到HC-05上,再通过串口通信和STM32通信;而之前一般都是电脑上通过USB线转串口的方式,通过串口和STM32通信。本质上没有区别的。
这个时候就应该更加深刻地体会到了本文开篇的一句话:说白了,只是个蓝牙转串口的设备,你只要知道串口怎么编程使用,就可以了,实现了所谓的透明传输。蓝牙的相关一切都被封装起来了,都不需要接触到。
蓝牙模块的调试
准备工作
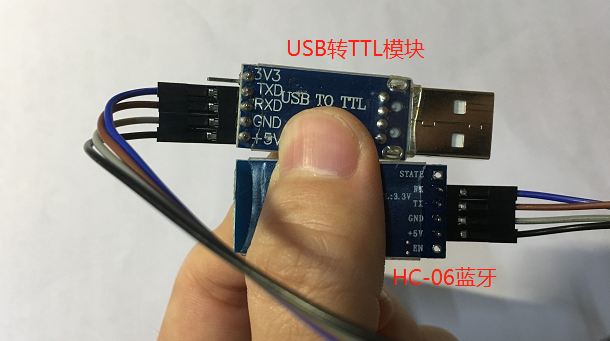
USB转TTL模块与HC-05蓝牙模块的接线:
两模块共地,两模块共VCC(VCC取5V);蓝牙模块的RX接转换模块的TX,蓝牙模块的TX接转换模块的RX。如下图所示:
这个时候就要将转换模块连接到电脑上,然后利用串口调试助手进行蓝牙模块的调试。
附可能会用到的驱动:链接:https://pan.baidu.com/s/1bpYLfCr 密码:yabv
蓝牙模块的调试
HC-05蓝牙串口通讯模块具有两种工作模式:命令响应工作模式(AT)和自动连接工作模式。在自动连接工作模式下模块又可分为主(Master)、从(Slave)和回环(Loopback)三种工作角色。
- 当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;
- 当模块处于命令响应工作模式时能执行AT命令,用户可向模块发送各种AT 指令,为模块设定控制参数或发布控制命令。
怎么进入命令响应工作模式?
进入命令响应工作模式有两种方法:
- 模块上电,未配对情况下就是AT模式,波特率为模块本身的波特率,默认:9600,发送一次AT指令时需要置高一次PIO11;
- PIO11 置高电平后,再给模块上电,此时模块进入AT 模式,波特率固定为:38400,可以直接发送AT指令。
什么叫做置高一次PIO11?
在蓝牙模块中有一个小按键,按一下就置高一次PIO11。也就是说,第一种方法需要每发送一次AT指令按一次;而第二种方式是长按的过程中上电,之后就无需再管了,直接发送AT命令即可。
需要注意一下,两种进入命令响应工作模式的方式使用的波特率是不一样的,建议使用第二种方式。
怎么区分进了命令响应工作模式呢?
在蓝牙模块上有灯,当灯快闪的时候,就是自动连接工作模式;当灯慢闪的时候,就是命令响应工作模式。
AT命令
进入到命令响应工作模式之后,就可以使用串口调试助手进行蓝牙调试了。
首先有一点,AT指令不区分大小写,均以回车、换行结尾。下面介绍常用的AT指令:
手机与蓝牙模块之间的传输(快速测试)
直接将蓝牙模块与转换模块连接,再讲其连接到电脑上,蓝牙模块直接进入自动连接工作模式。
手机蓝牙控制STM32单片机
之前的两个例子都是相比较而言比较简单的,这个例子将会涉及到程序的内容了。
实现功能:手机通过蓝牙,向STM32单片机发送消息,STM32接收到消息之后原封不动的返回给手机。当然如果掌握了这个例子,也可以修改成,手机发送特定的消息,然后,STM32单片机做出相对应的动作。比如:点亮LED等、发动电机等等。
连接说明
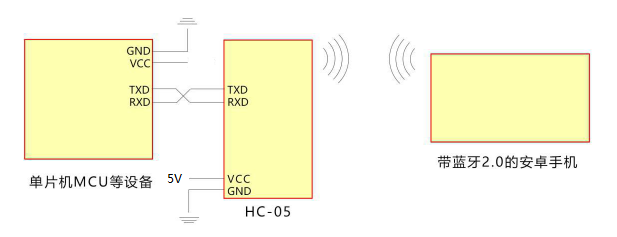
使用USART1进行试验,也就是说STM32选取PA9、PA10来和HC-05进行连接。同时手机通过蓝牙来和HC-05进行连接。
原理就是:手机通过蓝牙传输到HC-05上,再通过串口通信和STM32通信;而之前一般都是电脑上通过USB线转串口的方式,通过串口和STM32通信。本质上没有区别的。
这个时候就应该更加深刻地体会到了本文开篇的一句话:说白了,只是个蓝牙转串口的设备,你只要知道串口怎么编程使用,就可以了,实现了所谓的透明传输。蓝牙的相关一切都被封装起来了,都不需要接触到。
STM32控制程序


1 #include "stm32f10x.h" 2 3 4 void My_USART1_Init(void) 5 6 { 7 8 GPIO_InitTypeDef GPIO_InitStrue; 9 10 USART_InitTypeDef USART_InitStrue; 11 12 NVIC_InitTypeDef NVIC_InitStrue; 13 14 15 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIO端口使能 16 17 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口端口使能 18 19 20 GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP; 21 22 GPIO_InitStrue.GPIO_Pin=GPIO_Pin_9; 23 24 GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz; 25 26 GPIO_Init(GPIOA,&GPIO_InitStrue); 27 28 29 GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING; 30 31 GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10; 32 33 GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz; 34 35 GPIO_Init(GPIOA,&GPIO_InitStrue); 36 37 38 USART_InitStrue.USART_BaudRate=115200; 39 40 USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None; 41 42 USART_InitStrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; 43 44 USART_InitStrue.USART_Parity=USART_Parity_No; 45 46 USART_InitStrue.USART_StopBits=USART_StopBits_1; 47 48 USART_InitStrue.USART_WordLength=USART_WordLength_8b; 49 50 51 USART_Init(USART1,&USART_InitStrue); 52 53 54 USART_Cmd(USART1,ENABLE);//使能串口1 55 56 57 USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开启接收中断 58 59 60 NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn; 61 62 NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE; 63 64 NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1; 65 66 NVIC_InitStrue.NVIC_IRQChannelSubPriority=1; 67 68 NVIC_Init(&NVIC_InitStrue); 69 70 71 } 72 73 74 void USART1_IRQHandler(void) 75 76 { 77 78 u8 res; 79 80 if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET) 81 82 { 83 84 res= USART_ReceiveData(USART1); 85 86 USART_SendData(USART1,res); 87 88 } 89 90 } 91 92 93 int main(void) 94 95 { 96 97 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); 98 99 My_USART1_Init(); 100 101 while(1); 102 103 104 }
这段程序和【STM32】串口相关配置寄存器、库函数(UART一般步骤)中的程序一模一样,几乎没有什么改动。
区别就是,在UART实验中,USART1是和USB转串口模块连接在一起的,然后与电脑上的串口调试助手进行通信;现在改成USART1是和蓝牙模块连接在一起的,然后和手机上的蓝牙串口调试助手进行通信。