最近一直在研究Apollo的安装问题,浪费了几天时间,所有特意来记录一下安装心得。
UBUNTU 14.04安装
这个我是把自己的笔记本全部转换为ubuntu系统,操作相对简单,大家可以自行查找,另外,镜像源采用阿里的镜像源,非常便捷好用。
Apollo安装
根据开发者发布的《Apollo快速安装视频教程》(https://www.csdn.net/article/a/2018-05-14/15948340)的提示我们开始Apollo平台的安装。
大家知道Apollo将代码开源在了Github。第一步,就需要克隆Apollo 的开源代码。
git clone https://github.com/apolloauto/apollo
接下来,设置Docker 环境,我们已在源代码中提供了,安装docker 的脚本。运行该脚本即可完成安装。
bash docker/scripts/install_docker.sh
但是这一步我出现问题,文件夹中并没有install_docker.sh文件,解决办法如下:
采用DaoCloud 安装 Dokcer,具体步骤:
sudo apt-get update sudo apt-get install -y apt-transport-https ca-certificates curl software-properties-common curl -fsSL https://download.daocloud.io/docker/linux/ubuntu/gpg | sudo apt-key add - sudo add-apt-repository "deb [arch=$(dpkg --print-architecture)] https://download.daocloud.io/docker/linux/ubuntu $(lsb_release -cs) stable" sudo apt-get update sudo apt-get install -y -q docker-ce=17.09.1* sudo service docker start sudo service docker status
至此,一切顺利的话,Docker 安装好了。
使用 Docker 需要 root 权限,我们创建一个 docker 组,将当前用户加入到组里,使用 Docker 就可以不需要输入 sudo了
// 创建 docker 组 $ sudo groupadd docker // 加入到 docker 组 $ sudo usermod -aG docker $USER
运行基本上不会有什么问题,之后我们继续安装apollo
紧接着是拉取Docker镜像。镜像是Apollo官方定期发布,一般是每周发布的运行环境的镜像。拉取完成之后,脚本会根据镜像创建Apollo运行的容器环境。
bash docker/scripts/dev_start.sh -C
(注:这里面的地址必须是你文件夹中显示文件的地址)
在运行容器无误的情况下,可以通过Apollo提供的脚本进入该容器。
bash docker/scripts/dev_into.sh
这时主机名称已变成in_dev_docekr,说明已经进入到容器环境;因为,对Apollo的编译,是在容器内进行的,编译,通过以下脚本完成
bash apollo.sh build
至此,都很顺利,但因为我没有GPU所有。之后的命令有问题,所有转战Apollo文件夹中的readme寻找答案
如果您没有nVidia GPU,系统将运行但具有基于CUDA的感知和其他模块。您必须指定dbg调试模式或opt优化代码
./apollo.sh build_no_perception dbg
如果您对Dreamview前端进行了修改,则必须./apollo.sh build_fe 在运行完整版本之前运行。
如果计算机速度很慢,可以输入以下命令来限制CPU。
bash apollo.sh build --local_resources 2048,1.0,1.0
启动阿波罗
运行Apollo将启动ROS核心,然后启动一个名为Dreamview的Web用户界面,这由引导脚本处理,因此从docker容器中,您应该运行:
# start module monitor bash scripts/bootstrap.sh
访问Dreamview
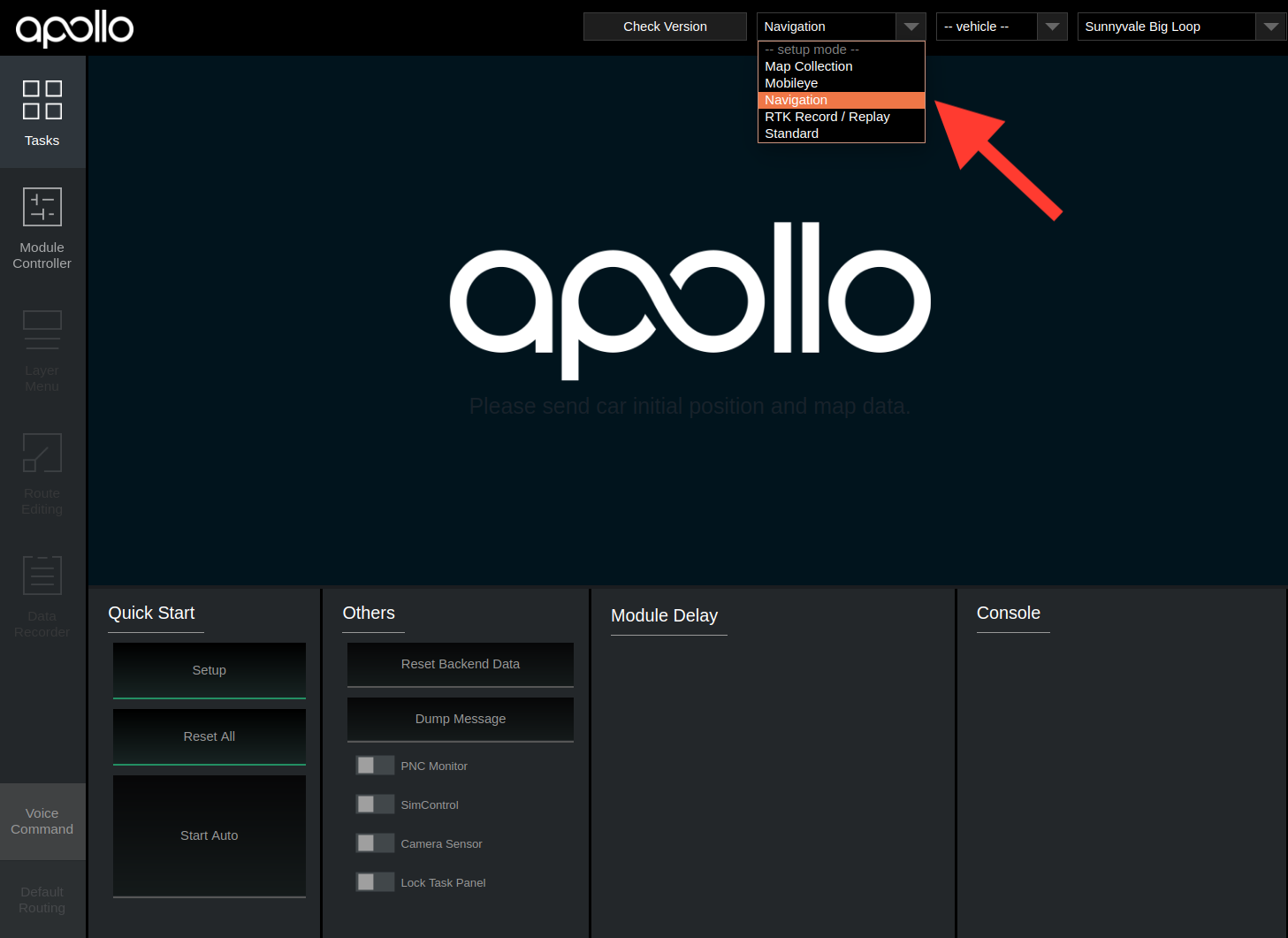
通过打开您喜爱的浏览器访问Dreamview,例如Chrome,转到http:// localhost:8888,您应该看到此屏幕但是,系统中没有任何内容正在运行。
选择驱动模式
从下拉框中选择“导航”模式。
重播演示rosbag
要查看系统是否正常工作,请使用为系统提供信息的演示“包”。
# get rosbag note that the command download is required python ./docs/demo_guide/rosbag_helper.py demo_2.5.bag # You can now replay this demo "bag" in a loop with the '-l' flag rosbag play -l demo_2.5.bag
Dreamview现在应该展示一辆跑车。
画面中 的小车车跑起来就成功啦!!!!真的要感想不放弃的自己,吼吼~~~