一. ROS的安装
1. 进入ROS官方网站 http://wiki.ros.org/
2. Install -> ROS Kinetic Kame -> Ubuntu
3. 详情可参考所打开的界面,具体命令行代码将在下面列出
4. 哦对了,首先应该配置一下软件的下载源。点击右上角的设置 -> 系统设置 -> 软件和更新 -> 下载自选择其他站点 -> 选择清华园的服务器
5. 安装ROS具体命令行如下:
1 sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3 sudo apt-get update
4 sudo apt-get install ros-kinetic-desktop-full
5 sudo rosdep init
6 rosdep update
7 echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
8 source ~/.bashrc
9 sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
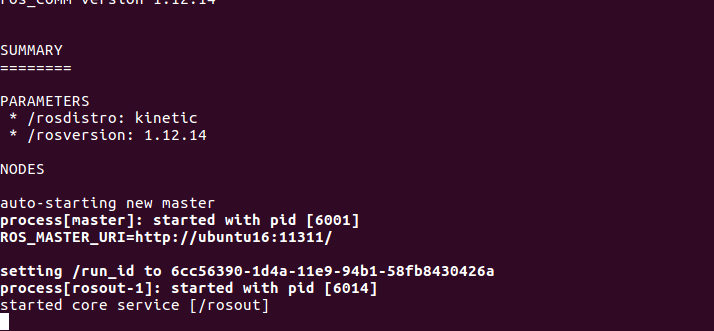
6. 重新打开一个命令行,输入 roscore,回车,出现如下界面表示安装成功
二. IDE:Roboware的安装
1. 推荐包安装方式,方便简单。打开官网 http://cn.roboware.me/#/Download
2. 选择Roboware Studio,下载Linux 64位版本
3. 双击下载包安装
4. 在命令行输入 roboware-studio,回车即可打开IDE