参考视频:【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程_哔哩哔哩_bilibili
参考文档:http://www.autolabor.com.cn/book/ROSTutorials/
需求描述:
将之前的机器人模型(xacro版)显示在 gazebo 中
结果演示: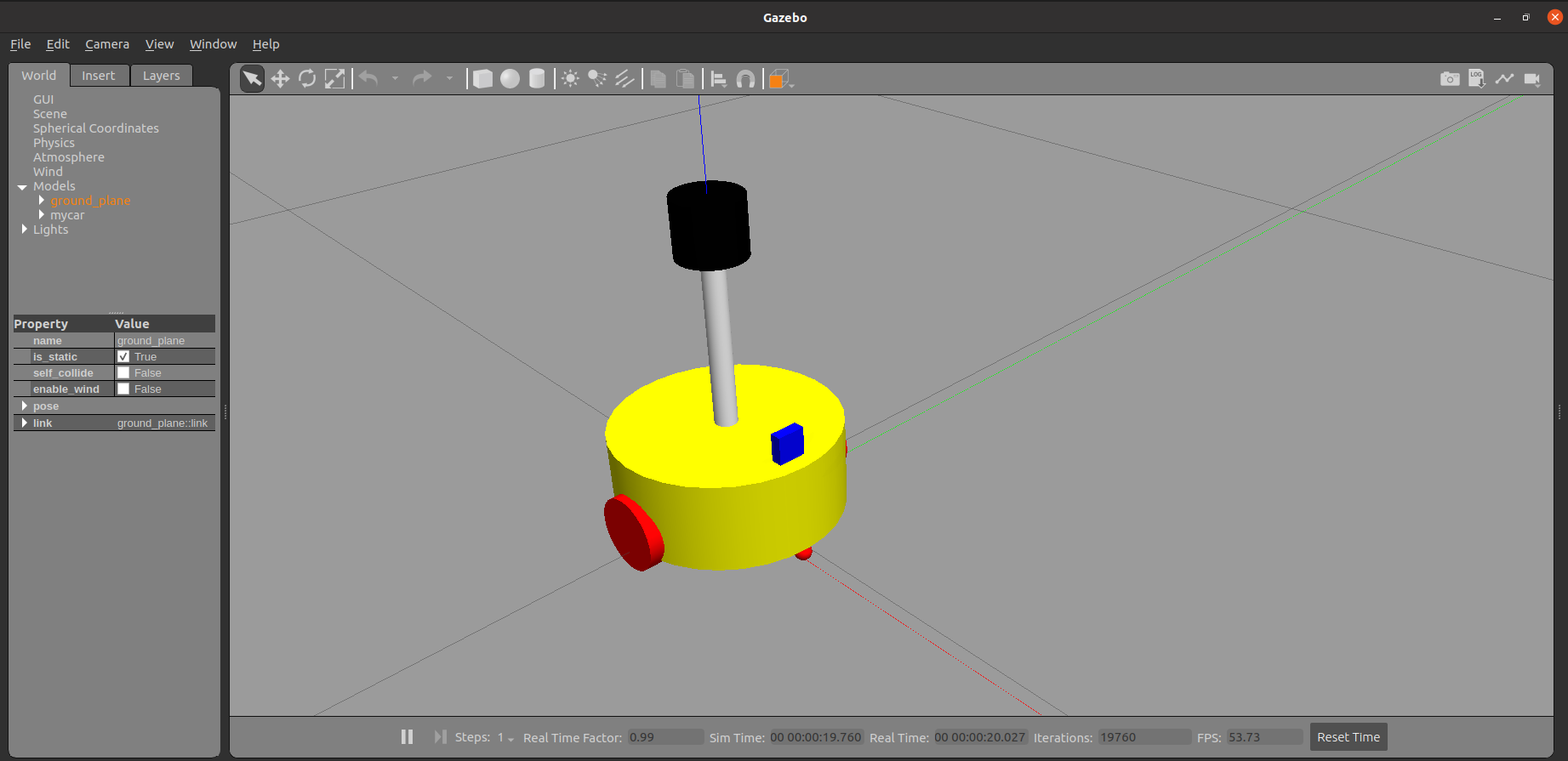 实现流程:
实现流程:
-
需要编写封装惯性矩阵算法的 xacro 文件
-
为机器人模型中的每一个 link 添加 collision 和 inertial 标签,并且重置颜色属性
-
在 launch 文件中启动 gazebo 并添加机器人模型
1.编写封装惯性矩阵算法的 xacro 文件
在 urdf 文件夹下新建 head.xacro 文件,并写入以下代码:
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro"> <!-- Macro for inertia matrix --> <xacro:macro name="sphere_inertial_matrix" params="m r"> <inertial> <mass value="${m}" /> <inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0" iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /> </inertial> </xacro:macro> <xacro:macro name="cylinder_inertial_matrix" params="m r h"> <inertial> <mass value="${m}" /> <inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0" iyy="${m*(3*r*r+h*h)/12}" iyz = "0" izz="${m*r*r/2}" /> </inertial> </xacro:macro> <xacro:macro name="Box_inertial_matrix" params="m l w h"> <inertial> <mass value="${m}" /> <inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0" iyy="${m*(w*w + l*l)/12}" iyz= "0" izz="${m*(w*w + h*h)/12}" /> </inertial> </xacro:macro> </robot>
2.复制相关 xacro 文件,并设置 collision inertial 以及 color 等参数
将上几节 https://www.cnblogs.com/caiyishuai/p/15048663.html 中的
底盘文件 demo05_car_base.urdf.xacro
摄像头文件 demo06_car_camera.urdf.xacro
雷达文件 demo07_car_laser.urdf.xacro
组合文件 car.urdf.xacro
复制到 urdf 文件下
car.urdf.xacro
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!--包含惯性矩阵文件--> <xacro:include filename="head.xacro" /> <!--包含底盘、摄像头与雷达的 xacro 文件--> <xacro:include filename="demo05_car_base.urdf.xacro" /> <xacro:include filename="demo06_car_camera.urdf.xacro" /> <xacro:include filename="demo07_car_laser.urdf.xacro" /> </robot>
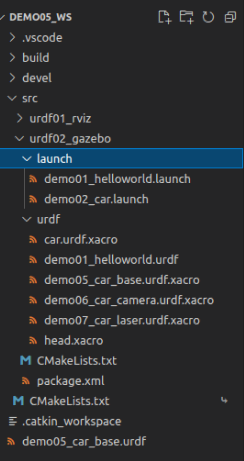
在 launch 文件夹下新建 demo02_car.launch 如下:
<launch> <!--1.需要在参数服务器中载入 urdf --> <param name="robot_description" command="$(find xacro)/xacro $(find urdf02_gazebo)/urdf/car.urdf.xacro" /> <!--2.启动 Gazebo 仿真环境 --> <include file="$(find gazebo_ros)/launch/empty_world.launch" /> <!--3.在 Gazebo 中添加机器人模型 --> <node pkg="gazebo_ros" type="spawn_model" name="spawn_model" args="-urdf -model car -param robot_description" /> </launch>
设置底盘文件 demo05_car_base.urdf.xacro collision inertial 以及 color 等参数
底盘
<!-- 底盘属性 --> <xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --> <xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --> <xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 --> <xacro:property name="base_link_mass" value="2" /> <!-- base_link 长 --> <xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --> <!-- 底盘 --> <link name="base_footprint"> <visual> <geometry> <sphere radius="${base_footprint_radius}" /> </geometry> </visual> </link> <link name="base_link"> <visual> <geometry> <cylinder radius="${base_link_radius}" length="${base_link_length}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="green"> <color rgba="0.0 0.8 0.3 0.5" /> </material> </visual> <!--设置惯性矩阵--> <collision> <geometry> <cylinder radius="${base_link_radius}" length="${base_link_length}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> </collision> <!--调用惯性矩阵函数--> <xacro:cylinder_inertial_matrix m="${base_link_mass}" r="${base_link_radius}" h="${base_link_length}" /> </link> <gazebo reference="base_link"> <material>Gazebo/Yellow</material> </gazebo>
驱动轮
<!-- 驱动轮 --> <!-- 驱动轮属性 --> <xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --> <xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --> <xacro:property name="wheel_mass" value="0.05" /><!-- 宽度 --> <!-- 驱动轮宏实现 --> <xacro:macro name="add_wheels" params="name flag"> <link name="${name}_wheel"> <visual> <geometry> <cylinder radius="${wheel_radius}" length="${wheel_length}" /> </geometry> <origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /> <material name="black" /> </visual> <collision> <geometry> <cylinder radius="${wheel_radius}" length="${wheel_length}" /> </geometry> <origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /> </collision> <xacro:property name="wheel_mass" value="0.05" /><!-- 宽度 --> <xacro:cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" /> </link> <gazebo reference="${name}_wheel"> <material>Gazebo/Red</material> </gazebo>
支撑轮
<!-- 支撑轮 --> <!-- 支撑轮属性 --> <xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --> <xacro:property name="support_wheel_mass" value="0.01" /> <!-- 支撑轮半径 --> <!-- 支撑轮宏 --> <xacro:macro name="add_support_wheel" params="name flag" > <link name="${name}_wheel"> <visual> <geometry> <sphere radius="${support_wheel_radius}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="black" /> </visual> <collision> <geometry> <sphere radius="${support_wheel_radius}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> </collision> <xacro:sphere_inertial_matrix m="${support_wheel_mass}" r="${support_wheel_radius}" /> </link> <gazebo reference="${name}_wheel"> <material>Gazebo/Red</material> </gazebo>
最后,demo05_car_base.urdf.xacro 更改为:


<!-- 使用 xacro 优化 URDF 版的小车底盘实现: 实现思路: 1.将一些常量、变量封装为 xacro:property 比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 .... 2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮 --> <!-- 根标签,必须声明 xmlns:xacro --> <robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!-- 封装变量、常量 --> <xacro:property name="PI" value="3.141"/> <!-- 宏:黑色设置 --> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> </material> <!-- 底盘属性 --> <xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --> <xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --> <xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 --> <xacro:property name="base_link_mass" value="2" /> <!-- base_link 长 --> <xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --> <!-- 底盘 --> <link name="base_footprint"> <visual> <geometry> <sphere radius="${base_footprint_radius}" /> </geometry> </visual> </link> <link name="base_link"> <visual> <geometry> <cylinder radius="${base_link_radius}" length="${base_link_length}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="green"> <color rgba="0.0 0.8 0.3 0.5" /> </material> </visual> <!--设置惯性矩阵--> <collision> <geometry> <cylinder radius="${base_link_radius}" length="${base_link_length}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> </collision> <!--调用惯性矩阵函数--> <xacro:cylinder_inertial_matrix m="${base_link_mass}" r="${base_link_radius}" h="${base_link_length}" /> </link> <gazebo reference="base_link"> <material>Gazebo/Yellow</material> </gazebo> <joint name="base_link2base_footprint" type="fixed"> <parent link="base_footprint" /> <child link="base_link" /> <origin xyz="0 0 ${earth_space + base_link_length / 2 }" /> </joint> <!-- 驱动轮 --> <!-- 驱动轮属性 --> <xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --> <xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --> <xacro:property name="wheel_mass" value="0.05" /><!-- 宽度 --> <!-- 驱动轮宏实现 --> <xacro:macro name="add_wheels" params="name flag"> <link name="${name}_wheel"> <visual> <geometry> <cylinder radius="${wheel_radius}" length="${wheel_length}" /> </geometry> <origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /> <material name="black" /> </visual> <collision> <geometry> <cylinder radius="${wheel_radius}" length="${wheel_length}" /> </geometry> <origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /> </collision> <xacro:property name="wheel_mass" value="0.05" /><!-- 宽度 --> <xacro:cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" /> </link> <gazebo reference="${name}_wheel"> <material>Gazebo/Red</material> </gazebo> <joint name="${name}_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="${name}_wheel" /> <origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /> <axis xyz="0 1 0" /> </joint> </xacro:macro> <xacro:add_wheels name="left" flag="1" /> <xacro:add_wheels name="right" flag="-1" /> <!-- 支撑轮 --> <!-- 支撑轮属性 --> <xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --> <xacro:property name="support_wheel_mass" value="0.01" /> <!-- 支撑轮半径 --> <!-- 支撑轮宏 --> <xacro:macro name="add_support_wheel" params="name flag" > <link name="${name}_wheel"> <visual> <geometry> <sphere radius="${support_wheel_radius}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="black" /> </visual> <collision> <geometry> <sphere radius="${support_wheel_radius}" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> </collision> <xacro:sphere_inertial_matrix m="${support_wheel_mass}" r="${support_wheel_radius}" /> </link> <gazebo reference="${name}_wheel"> <material>Gazebo/Red</material> </gazebo> <joint name="${name}_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="${name}_wheel" /> <origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /> <axis xyz="1 1 1" /> </joint> </xacro:macro> <xacro:add_support_wheel name="front" flag="1" /> <xacro:add_support_wheel name="back" flag="-1" /> </robot>
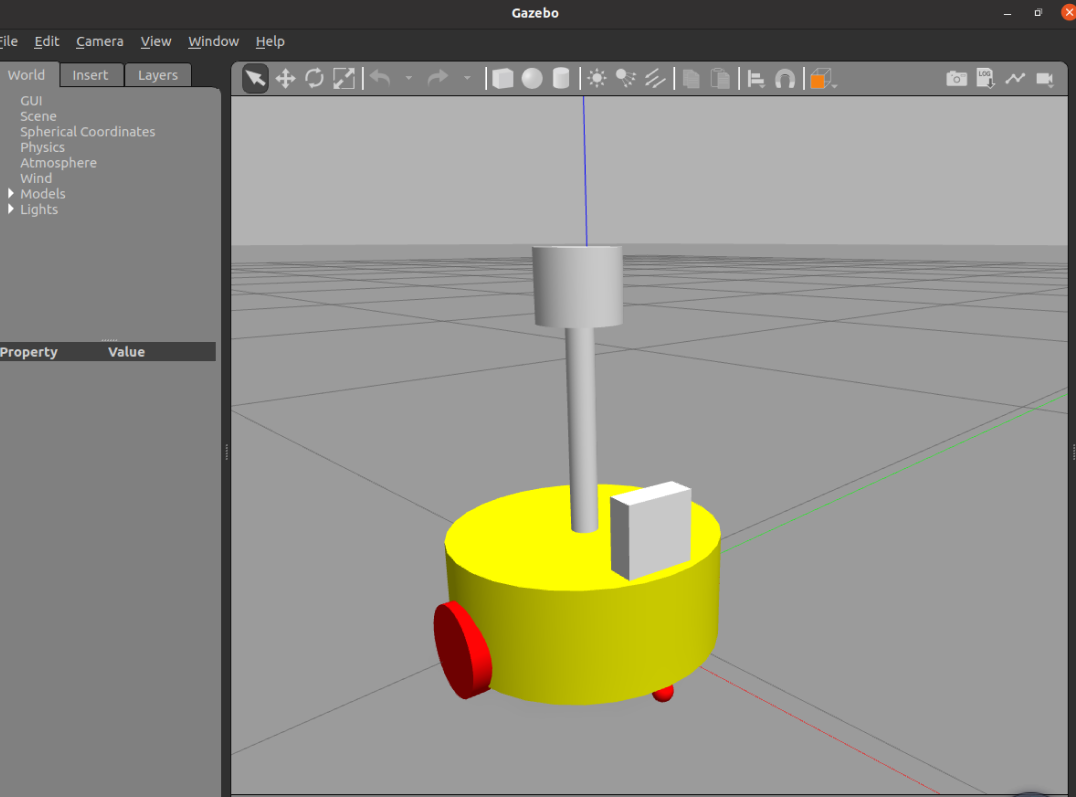
运行查看结果
设置摄像头文件 demo06_car_camera.urdf.xacro collision inertial 以及 color 等参数
<robot name="my_car" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!--摄像头部件--> <!--1.参数--> <!-- 参数: 连杆属性:厚度、宽度、高度 关节属性:x y z --> <xacro:property name="camera_length" value="0.02" /><!--厚度(x)--> <xacro:property name="camera_width" value="0.05" /><!--宽度(y)--> <xacro:property name="camera_height" value="0.05" /><!--高度(z)--> <xacro:property name="camera_mass" value="0.01" /><!--高度(z)--> <xacro:property name="joint_camera_x" value="0.08" /><!--x上偏移量--> <xacro:property name="joint_camera_y" value="0" /><!--y上偏移量--> <xacro:property name="joint_camera_z" value="${base_link_length / 2 + camera_height / 2}" /><!--z上偏移量--> <!--2.设计连杆和关节--> <link name="camera"> <visual> <geometry> <box size="${camera_length} ${camera_width} ${camera_height}" /> </geometry> <material name="blue"> <color rgba="0 0.3 0.8 0.8" /> </material> </visual> <collision> <geometry> <box size="${camera_length} ${camera_width} ${camera_height}" /> </geometry> </collision> <xacro:Box_inertial_matrix m="${camera_mass}" l="${camera_length}" w="${camera_width}" h="${camera_height}"/> </link> <gazebo reference="camera"> <material>Gazebo/Blue </material> </gazebo> <joint name="camera2base" type="fixed"> <parent link="base_link" /> <child link="camera" /> <origin xyz="${joint_camera_x} ${joint_camera_y} ${joint_camera_z}" rpy="0 0 0" /> </joint> </robot>

设置雷达文件 demo07_car_laser.urdf.xacro collision inertial 以及 color 等参数
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!--雷达部件--> <!--参数--> <!-- 1.支架 支架尺寸:半径 高度 关节偏移量:x y z 2.雷达 雷达尺寸:半径 高度 关节偏移量:x y z --> <xacro:property name="support_radius" value="0.01" /> <xacro:property name="support_length" value="0.15" /> <xacro:property name="support_mass" value="0.1" /> <xacro:property name="laser_radius" value="0.03" /> <xacro:property name="laser_length" value="0.05" /> <xacro:property name="laser_mass" value="0.15" /> <xacro:property name="joint_support_x" value="0" /> <xacro:property name="joint_support_y" value="0" /> <!-- z = 车体高度 / 2 + 支架高度 / 2--> <xacro:property name="joint_support_z" value="${base_link_length / 2 + support_length / 2}" /> <xacro:property name="joint_laser_x" value="0" /> <xacro:property name="joint_laser_y" value="0" /> <!-- z = 支架高度 / 2 + 雷达高度 / 2--> <xacro:property name="joint_laser_z" value="${support_length / 2 + laser_length / 2}" /> <!--1.支架--> <link name="support"> <visual> <geometry> <cylinder radius="${support_radius}" length="${support_length}" /> </geometry> <material name="red"> <color rgba="0.8 0 0.0 0.8" /> </material> </visual> <collision> <geometry> <cylinder radius="${support_radius}" length="${support_length}" /> </geometry> </collision> <xacro:cylinder_inertial_matrix m="${support_mass}" r="${laser_radius}" h="${laser_length}" /> </link> <gazebo reference="support"> <material>Gazebo/Gray</material> </gazebo> <joint name="support2base" type="fixed"> <parent link="base_link" /> <child link="support" /> <origin xyz="${joint_support_x} ${joint_support_y} ${joint_support_z}" rpy="0 0 0" /> </joint> <!--2.雷达--> <link name="laser"> <visual> <geometry> <cylinder radius="${laser_radius}" length="${laser_length}" /> </geometry> <material name="yellow"> <color rgba="1 1 0 0.8" /> </material> </visual> <collision> <geometry> <cylinder radius="${laser_radius}" length="${laser_length}" /> </geometry> </collision> <xacro:cylinder_inertial_matrix m="${laser_mass}" r="${laser_radius}" h="${laser_length}" /> </link> <gazebo reference="laser"> <material>Gazebo/Black</material> </gazebo> <joint name="laser2support" type="fixed"> <parent link="support" /> <child link="laser" /> <origin xyz="${joint_laser_x} ${joint_laser_y} ${joint_laser_z}" rpy="0 0 0" /> </joint> </robot>
