@
一、奇异值分解(SVD)原理
1.1 回顾特征值和特征向量
我们首先回顾下特征值和特征向量的定义如下:
其中A是一个n×n的实对称矩阵,x是一个n维向量,则我们说λ是矩阵A的一个特征值,而x是矩阵A的特征值λ所对应的特征向量。
求出特征值和特征向量有什么好处呢? 就是我们可以将矩阵A特征分解。如果我们求出了矩阵A的n个特征值(λ_1≤λ_2≤...≤λ_n),以及这n个特征值所对应的特征向量(w_1,w_2,...,w_n),如果这n个特征向量线性无关,那么矩阵A就可以用下式的特征分解表示:
其中W是这n个特征向量所张成的n×n维矩阵,而Σ为这n个特征值为主对角线的n×n维矩阵。一般我们会把W的这n个特征向量标准化,即满足(||w_i||_2=1), 或者说(w^T_iw_i=1),此时W的n个特征向量为标准正交基,满足(W^TW=I),即(W^T=W^−1), 也就是说W为酉矩阵。
这样我们的特征分解表达式可以写成
注意到要进行特征分解,矩阵A必须为方阵。那么如果A不是方阵,即行和列不相同时,我们还可以对矩阵进行分解吗?答案是可以,此时我们的SVD登场了。
1.2 SVD的定义
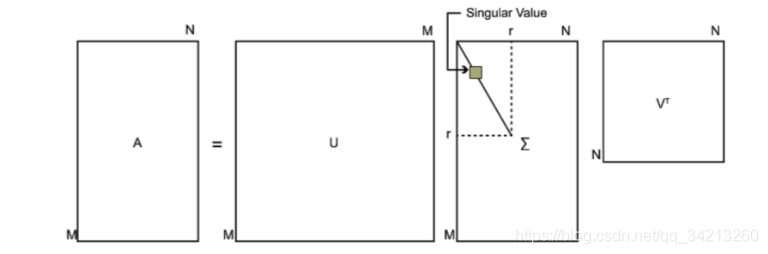
SVD也是对矩阵进行分解,但是和特征分解不同,SVD并不要求要分解的矩阵为方阵。假设我们的矩阵A是一个m×n的矩阵,那么我们定义矩阵A的SVD为:
其中U是一个m×m的矩阵,Σ是一个m×n的矩阵,除了主对角线上的元素以外全为0,主对角线上的每个元素都称为奇异值,V是一个n×n的矩阵。U和V都是酉矩阵,即满足(U^TU=I,V^TV=I)。下图可以很形象的看出上面SVD的定义:
1.3 求出SVD分解后的U,Σ,V矩阵
如果我们将A的转置和A做矩阵乘法,那么会得到n×n的一个方阵(A^TA)。既然ATA是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
这样我们就可以得到矩阵(A^TA)的n个特征值和对应的n个特征向量v了。将(A^TA)的所有特征向量张成一个n×n的矩阵V,就是我们SVD公式里面的V矩阵了。一般我们将V中的每个特征向量叫做A的右奇异向量。
如果我们将A和A的转置做矩阵乘法,那么会得到m×m的一个方阵(AA^T)。既然(AA^T)是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
这样我们就可以得到矩阵(AA^T)的m个特征值和对应的m个特征向量u了。将AAT的所有特征向量张成一个m×m的矩阵U,就是我们SVD公式里面的U矩阵了。一般我们将U中的每个特征向量叫做A的左奇异向量。
U和V我们都求出来了,现在就剩下奇异值矩阵Σ没有求出了。由于Σ除了对角线上是奇异值其他位置都是0,那我们只需要求出每个奇异值σ就可以了。
我们注意到:
(A=UΣV^T⇒AV=UΣV^TV⇒AV=UΣ⇒Av_i=σ_iu_i⇒σ_i=Av_i/u_i)
这样我们可以求出我们的每个奇异值,进而求出奇异值矩阵Σ。
上面还有一个问题没有讲,就是我们说ATA的特征向量组成的就是我们SVD中的V矩阵,而AAT的特征向量组成的就是我们SVD中的U矩阵,这有什么根据吗?这个其实很容易证明,我们以V矩阵的证明为例。
上式证明使用了:(U^TU=I,Σ^TΣ=Σ^2)。
可以看出(A^TA)的特征向量组成的的确就是我们SVD中的V矩阵。类似的方法可以得到(AA^T)的特征向量组成的就是我们SVD中的U矩阵。
进一步我们还可以看出我们的特征值矩阵等于奇异值矩阵的平方,也就是说特征值和奇异值满足如下关系:
这样也就是说,我们可以不用(sigma_{i}=A v_{i} / u_{i}=)来计算奇异值,也可以通过求出(A^TA)的特征值取平方根来求奇异值。
1.4 SVD计算举例
这里我们用一个简单的例子来说明矩阵是如何进行奇异值分解的。我们的矩阵A定义为:
我们首先求出(A^TA)和(AA^T)
进而求出(A^TA)的特征值和特征向量:
接着求(AA^T)的特征值和特征向量:
利用(Av_i=σ_iu_i,i=1,2)求奇异值:
当然,我们也可以用$$sigma_{i}=sqrt{lambda_{i}}$$直接求出奇异值为(sqrt{3})和1.
最终得到A的奇异值分解为:
1.5 SVD的一些性质
上面几节我们对SVD的定义和计算做了详细的描述,似乎看不出我们费这么大的力气做SVD有什么好处。那么SVD有什么重要的性质值得我们注意呢?
对于奇异值,它跟我们特征分解中的特征值类似,在奇异值矩阵中也是按照从大到小排列,而且奇异值的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上的比例。也就是说,我们也可以用最大的k个的奇异值和对应的左右奇异向量来近似描述矩阵。也就是说:
其中k要比n小很多,也就是一个大的矩阵A可以用三个小的矩阵(U_{m×k},Σ_{k×k},V^T_{k×n})
来表示。
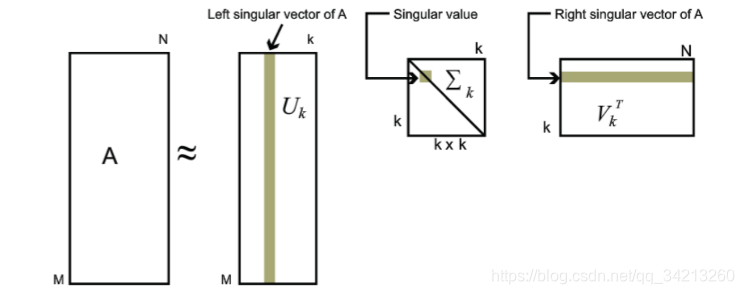
如下图所示,现在我们的矩阵A只需要灰色的部分的三个小矩阵就可以近似描述了。
由于这个重要的性质,SVD可以用于PCA降维,来做数据压缩和去噪。也可以用于推荐算法,将用户和喜好对应的矩阵做特征分解,进而得到隐含的用户需求来做推荐。同时也可以用于NLP中的算法,比如潜在语义索引(LSI)。
二、线性最小二乘问题
2.1 最小二乘问题复习
m个方程求解n个未知数,有三种情况:
- m=n且A为非奇异,则有唯一解,(x=A^{-1}b)
- m>n,约束的个数大于未知数的个数,称为超定问题(overdetermined)
- m<n,负定/欠定问题(underdetermined)
通常我们遇到的都是超定问题,此时Ax=b的解是不存在的,从而转向解最小二乘问题:
J(x)为凸函数,我们令一阶导数为0,得到:(A^{T} A x-A^{T} b=0),称之为正规方程一般解:
2.2 奇异值分解与线性最小二乘问题
因为矩阵的逆很难求解,因此用SVD分解A矩阵
参考链接
https://www.cnblogs.com/pinard/p/6251584.html
打赏
创作不易,如果对您有帮助,就打赏一下吧O(∩_∩)O

