import numpy as np
from matplotlib import pyplot as plt
import random
import math
from numpy.linalg.linalg import norm
def checksgn(x):
return x >= 0
def check(p, i, j):
if i < min(x[0] for x in p):
return 0
if i > max(x[0] for x in p):
return 0
if j < min(x[1] for x in p):
return 0
if j > max(x[1] for x in p):
return 0
p = np.array([[x[0], x[1], 0] for x in p])
return checksgn(np.cross(p[1]-p[0], p[0]-[i, j, 0])[2]) == checksgn(np.cross(p[2]-p[1], p[1]-[i, j, 0])[2]) == checksgn(np.cross(p[0]-p[2], p[2]-[i, j, 0])[2])
def getInterpZ(p_screenspace, p_viewspace, j, i):
q = np.array([j, i, 0])
pp = np.array([np.array([x[0], x[1], 0]) for x in p_screenspace])
w = [np.linalg.norm(np.cross(pp[(i+1) % 3]-q, pp[(i+2) % 3]-q), ord=2)
for i in range(3)]
w /= np.sum(w)+1e-9
ans = 1/(np.sum([w[i]/(p_viewspace[i][2]+1e-9) for i in range(3)])-1e-9)
ans = min(ans, max(p[2] for p in p_viewspace))
ans = max(ans, min(p[2] for p in p_viewspace))
return -ans
def getInterp(p_screenspace, p_viewspace, vals, j, i):
q = np.array([j, i, 0])
pp = np.array([np.array([x[0], x[1], 0]) for x in p_screenspace])
w = [np.linalg.norm(np.cross(pp[(i+1) % 3]-q, pp[(i+2) % 3]-q), ord=2)
for i in range(3)]
w /= np.sum(w)+1e-9
tans = 1/(np.sum([w[i]/(p_viewspace[i][2]+1e-9) for i in range(3)])-1e-9)
tans = min(tans, max(p[2] for p in p_viewspace))
tans = max(tans, min(p[2] for p in p_viewspace))
ans = np.sum([w[i]*vals[i]/(p_viewspace[i][2]+1e-9)
for i in range(3)])-1e-9
return ans * tans
plt.ion()
angle = 0
while True:
angle += 0.1
vertices_worldspace = []
vertices_worldspace.append(
[np.array([0, 0, 1]), np.array([0, 1, 0]), np.array([1, 0, 0])])
vertices_worldspace.append(
[np.array([0, 0, 1]), np.array([0, 1, 0]), np.array([-1, 0, 0])])
vertices_worldspace.append(
[np.array([0, 0, -1]), np.array([0, 1, 0]), np.array([1, 0, 0])])
vertices_worldspace.append(
[np.array([0, 0, -1]), np.array([0, 1, 0]), np.array([-1, 0, 0])])
clip_n, clip_f, clip_l, clip_r, clip_t, clip_b = -3, -10, -1, 1, 1, -1
img_w = 100
img_h = 100
img = [[0 for j in range(img_w)] for i in range(img_h)]
zbuf = [[abs(clip_f)+1 for j in range(img_w)] for i in range(img_h)]
camera_pos = np.array([2*math.sin(angle), 4, 2*math.cos(angle)])
camera_gaze = -camera_pos
camera_gaze /= np.linalg.norm(camera_gaze, ord=2)
# camera_up = np.array([0, 1, 0])
camera_up = [
np.cross(np.cross(camera_gaze, np.array([0., 1, 0])), camera_gaze)]
camera_up /= np.linalg.norm(camera_up, ord=2)
camera_handle = np.cross(camera_gaze, camera_up)
camera_handle /= np.linalg.norm(camera_handle, ord=2)
camera_pos = np.append(camera_pos, 1)
camera_gaze = np.append(camera_gaze, 0)
camera_up = np.append(camera_up, 0)
camera_handle = np.append(camera_handle, 0)
transform_view_translate = np.array(
[[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0], [-camera_pos[0], -camera_pos[1], -camera_pos[2], 1]]).T
transform_view_rotate = np.concatenate(
([camera_handle], [camera_up], [-camera_gaze], [[0, 0, 0, 1]]))
transform_view = transform_view_rotate @ transform_view_translate
transform_proj_persp = np.array([[clip_n, 0, 0, 0], [0, clip_n, 0, 0], [
0, 0, clip_n+clip_f, -clip_n*clip_f], [0, 0, 1, 0]])
transform_proj_ortho = np.array([[2/(clip_r-clip_l), 0, 0, 0], [0, 2/(clip_t-clip_b), 0, 0], [0, 0, 2/(clip_n-clip_f), 0],
[(clip_l+clip_r)/(clip_r-clip_l), (clip_t+clip_b)/(clip_t-clip_b), (clip_n+clip_f)/(clip_n-clip_f), 1]]).T
transform_proj = transform_proj_ortho @ transform_proj_persp
transform_viewport = np.array(
[[img_w / 2, 0, 0, img_w/2], [0, img_h/2, 0, img_h/2], [0, 0, 1, 0], [0, 0, 0, 1]])
transform = transform_viewport @ transform_proj @ transform_view
light_dir = np.array([-1., 1., 1.])
light_dir /= np.linalg.norm(light_dir, ord=2)
light_dir_vs = (transform_view_rotate @ np.append(light_dir, 0))[:3]
diff = 0.5
spec = 3
spow = 8
ambi = 0.2
for triangle_ws in vertices_worldspace:
triangle_ss = [transform @ (np.array(j.tolist() + [1]))
for j in triangle_ws]
triangle_vs = [transform_view @ (np.array(j.tolist() + [1]))
for j in triangle_ws]
normal = np.cross(
triangle_vs[1][:3]-triangle_vs[0][:3], triangle_vs[2][:3]-triangle_vs[0][:3])
normal /= np.linalg.norm(normal, ord=2)
for i in range(img_h):
for j in range(img_w):
x = j
y = img_h - i - 1
if check([k[:2]/k[3] for k in triangle_ss], x, y):
zval = getInterpZ([k[:2]/k[3]
for k in triangle_ss], triangle_vs, x, y)
if zval < zbuf[i][j]:
zbuf[i][j] = zval
vsx = getInterp([k[:2]/k[3] for k in triangle_ss],
triangle_vs, [i[0] for i in triangle_vs], x, y)
vsy = getInterp([k[:2]/k[3] for k in triangle_ss],
triangle_vs, [i[0] for i in triangle_vs], x, y)
vsz = getInterp([k[:2]/k[3] for k in triangle_ss],
triangle_vs, [i[0] for i in triangle_vs], x, y)
vsp = np.array([vsx, vsy, vsz])
watch_dir = -vsp
watch_dir /= np.linalg.norm(watch_dir, ord=2)
half = light_dir_vs + watch_dir
half /= np.linalg.norm(half, ord=2)
color = ambi + diff * \
max(0, np.dot(normal, light_dir_vs)) + \
spec * (max(0, np.dot(normal, half)) ** spow)
img[i][j] = color
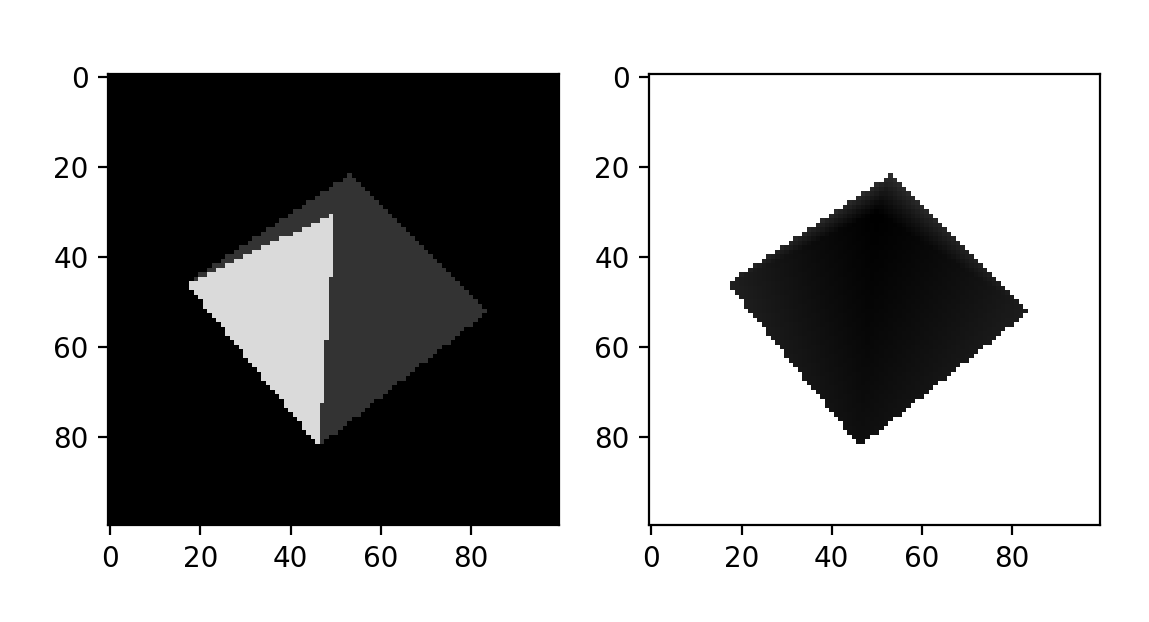
plt.subplot(121)
plt.imshow(img, cmap='gray', vmin=0, vmax=1)
plt.subplot(122)
plt.imshow(zbuf, cmap='gray')
plt.show()
plt.pause(0.2)
plt.clf() # 清除图像