1.缩放处理
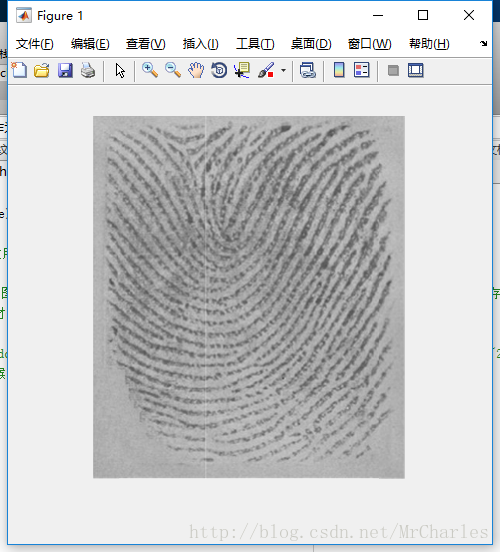
f=imread(image);%读取图像到内存
f=imresize(f,[363,312]);%该函数用于对图像做缩放处理。
figure;imshow(f);
%用rgb2gray 将彩色图像转换为灰度图像。matlab读入图像的数据是uint8,而matlab中数值一般采用double型(64位)存储和运算。
%所以要先将图像转为double格式的才能运算
gray=double(rgb2gray(f));
%转成uint8 imshow()显示图像时对double型是认为在0~1范围内即大于1时都是显示为白色,而imshow显示uint8型时是0~255范围。
%所以对double类型的图像显示的时候,要么归一化到0~1之间,要么将double类型的0~255数据转为uint8类型。
figure;imshow(uint8(gray));
2.归一化,灰度值限制在某一范围
%归一化,灰度值限制在某一范围
M=0;var=0;
%均值
for x=1:m
for y=1:n
M=M+gray(x,y);
end
end
M1=M/(m*n);%M1为均值 所有像素总共和除以多少个像素
%方差
for x=1:m
for y=1:n
var=var+(gray(x,y)-M1).^2;
end;
end;
var1=var/(m*n);%计算方差最终的大小 var1
%归一化 ********************************
for x=1:m
for y=1:n
if gray(x,y)>M1
gray(x,y)=150+sqrt(2000*(gray(x,y)-M1)/var1);
else
gray(x,y)=150-sqrt(2000*(M1-gray(x,y))/var1);
end
end
end
figure;imshow(uint8(gray));
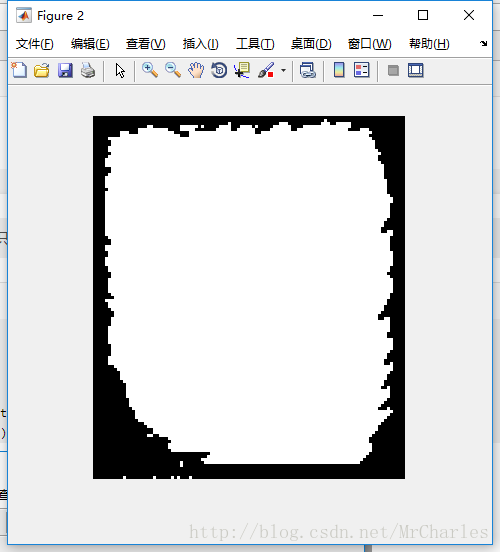
3.区分出前景色和背景色
%*************************************************************************************************************
%归一化处理完毕后会对图像进行分割处理,目的是区分出前景色和背景色。我采用的分割为根据多区域阈值分割。
%多区域分割的效果取决于区域的大小,而指纹的区域分为一脊一谷最好,所以我选择3x3的区域大小。我会根据对区域多次进行求均值和方差进行分割。
%分割 分成多个3*3的块大小
M=3;
H=floor(m/M);L=floor(n/M);
aveg1=zeros(H,L);
var1=zeros(H,L);
%计算每一块的平均值
for x=1:H
for y=1:L
aveg=0;var=0;
%每一块的均值
for i=1:M
for j=1:M
aveg=gray(i+(x-1)*M,j+(y-1)*M)+aveg;
end;
end;
aveg1(x,y)=aveg/(M*M);
%每一块的方差值
for i=1:M
for j=1:M
var=(gray(i+(x-1)*M,j+(y-1)*M)-aveg1(x,y)).^2+var;
end;
end;
var1(x,y)=var/(M*M);
end;
end;
%所有块的平均值和方差
Gmean=0;Vmean=0;
for x=1:H
for y=1:L
Gmean=Gmean+aveg1(x,y);
Vmean=Vmean+var1(x,y);
end
end
Gmean1=Gmean/(H*L);
Vmean1=Vmean/(H*L);
%每一小块和整块相比,再次求均值方差
% 前景(黑色)
gtemp=0;gtotle=0;vtotle=0;vtemp=0;
for x=1:H
for y=1:L
if Gmean1>aveg1(x,y)%如果当前快的均值小于全局均值 就认为是前景
gtemp=gtemp+1;
gtotle=gtotle+aveg1(x,y);
end
if Vmean1<var1(x,y)%如果当前快的方差大于全局方差 认为是前景
vtemp=vtemp+1;
vtotle=vtotle+var1(x,y);
end
end
end
% 前景均值
G1=gtotle/gtemp;
% 前景方差
V1=vtotle/vtemp;
%再次与刚刚产生的值相比
% 求得背景(白色)均值方差 增加可靠性
gtemp1=0;gtotle1=0;vtotle1=0;vtemp1=0;
for x=1:H
for y=1:L
if G1<aveg1(x,y)%如果当前快的均值大于前景的均值 就认为是背景
gtemp1=gtemp1+1;
gtotle1=gtotle1+aveg1(x,y);
end
if 0<var1(x,y)<V1%如果当前的方差小于前景的方差 就认为是背景
vtemp1=vtemp1+1;
vtotle1=vtotle1+var1(x,y);
end
end
end
% 背景均值
G2=gtotle1/gtemp1;
% 背景方差
V2=vtotle1/vtemp1;
%我会根据对区域多次进行求均值和方差进行分割。采集到的指纹图背景的灰度值大于前景色,背景主要为低频,所以背景的方差小于前景的方差。
%我分别求得背景和前景的均值和方差然后会得到背景为白色 脊线为黑色。
%然后保存在矩阵e(二值图)中,我会根据e中位置等于1的点的八邻域点的和小于四得到背景色,达到背景和前景分离(e矩阵)。
%****************************************
%构建矩阵(H*L)
e=zeros(H,L);
for x=1:H
for y=1:L
if aveg1(x,y)>G2 && var1(x,y)<V2 %当前的小块的值 大于背景均值 且当前小块的方差小于背景方差
% 背景
e(x,y)=1;
end
% 前景中的更接近黑色的变为白色
if aveg1(x,y)<G1-100 && var1(x,y)<V2
e(x,y)=1;
end
end
end
%该点八邻域小于四为0
%根据e中位置等于1的点的八邻域点的和小于四得到背景色,达到背景和前景分离(e矩阵)
for x=2:H-1
for y=2:L-1
if e(x,y)==1
if e(x-1,y) + e(x,y+1)+e(x+1,y+1)+e(x-1,y+1)+e(x+1,y)+e(x+1,y-1)+e(x,y-1)+e(x-1,y-1) <=4
e(x,y)=0;
end
end
end
end
%然后黑白反转让感兴趣的前景色变为白色(保存在Icc中),灰度图(gray)的背景值替换为小区域块的和的均值(G1).
%构建m*m矩阵
Icc=ones(m,n);
for x=1:H
for y=1:L
if e(x,y)==1 %如果 当前 是 1 是我们想要的
for i=1:M
for j=1:M
gray(i+(x-1)*M,j+(y-1)*M)=G1;
Icc(i+(x-1)*M,j+(y-1)*M)=0;
end
end
end
end
end
figure,imshow(uint8(gray));
figure,imshow(Icc);
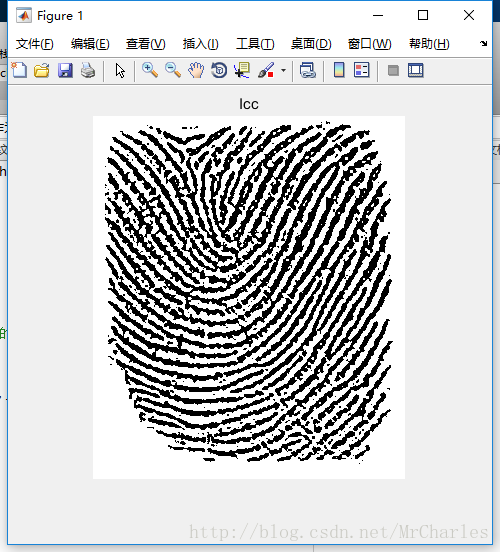
4.沿脊线方向增强指纹纹路
%但是得到的脊线方向并不能达到准确识别指纹。所以下一步会沿脊线方向增强指纹纹路,采用的方法为基于脊线方向场的增强方法。
%为了估计脊线的方向场,把脊线的方向场划分为八个方向,然后根据八个方向的灰度值的总和来得到脊线的方向。并对图像进行二值化。
%找指纹脊线方向并二值化
%*******************************
%*噪声对图像处理的影响很大,它影响图像处理的输入、采集和处理等各个环节以及输出结果。因此,在进行其它的图像处理前,需要对图像进行去噪处理。
%*均值滤波方法是,对待处理的当前像素,选择一个模板,该模板为其邻近的若干个像素组成,用模板的均值来替代原像素的值的方法。
temp=(1/9)*[1,1,1;1,1,1;1,1,1];%模板系数 均值滤波
Im=gray;
In=zeros(m,n);
for a=2:m-1
for b=2:n-1
In(a,b)=Im(a-1,b-1)*temp(1,1)+Im(a-1,b)*temp(1,2)+Im(a-1,b+1)*temp(1,3)+Im(a,b-1)*temp(2,1)...
+Im(a,b)*temp(2,2)+Im(a,b+1)*temp(2,3)+Im(a+1,b-1)*temp(3,1)+Im(a+1,b)*temp(3,2)+Im(a+1,b+1)*temp(3,3);
end
end
gray=In;%平滑后的图像矩阵
Im=zeros(m,n);
%为了估计脊线的方向场,把脊线的方向场划分为八个方向,然后根据八个方向的灰度值的总和来得到脊线的方向。并对图像进行二值化。
%求八个方向每个方向的和
for x=5:m-5
for y=5:n-5
%0-7方向的和
sum1=gray(x,y-4)+gray(x,y-2)+gray(x,y+2)+gray(x,y+4);
sum2=gray(x-2,y+4)+gray(x-1,y+2)+gray(x+1,y-2)+gray(x+2,y-4);
sum3=gray(x-2,y+2)+gray(x-4,y+4)+gray(x+2,y-2)+gray(x+4,y-4);
sum4=gray(x-2,y+1)+gray(x-4,y+2)+gray(x+2,y-1)+gray(x+4,y-2);
sum5=gray(x-2,y)+gray(x-4,y)+gray(x+2,y)+gray(x+4,y);
sum6=gray(x-4,y-2)+gray(x-2,y-1)+gray(x+2,y+1)+gray(x+4,y+2);
sum7=gray(x-4,y-4)+gray(x-2,y-2)+gray(x+2,y+2)+gray(x+4,y+4);
sum8=gray(x-2,y-4)+gray(x-1,y-2)+gray(x+1,y+2)+gray(x+2,y+4);
sumi=[sum1,sum2,sum3,sum4,sum5,sum6,sum7,sum8];
%最大值
summax=max(sumi);
%最小值
summin=min(sumi);
%和 &&平均值
summ=sum(sumi);
b=summ/8;
if(summax+summin+4*gray(x,y))> (3*b)
sumf=summin;
else
sumf=summax;
end
if sumf>b
Im(x,y)=128;
else
Im(x,y)=255;
end
end
end
% imshow(Im);
%两个矩阵点乘 Icc 白色的是感兴趣的像素 黑色的 0 表示的是边缘 不感兴趣的,需要略掉
for i=1:m
for j=1:n
Icc(i,j)=Icc(i,j)*Im(i,j);
end
end
%转换为二值图
for i=1:m
for j=1:n
if (Icc(i,j)==128)
Icc(i,j)=0;
else
Icc(i,j)=1;
end
end
end
figure;imshow(double(Icc));
title('Icc');
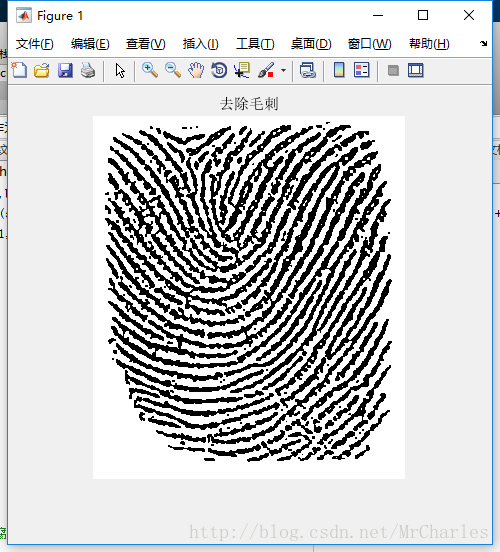
5.去除指纹中的空洞和毛刺
%因为各种采集原因(油脂水分等)会使指纹粘连断裂,会影响后续的特征提取和识别,接下来会去除指纹中的空洞和毛刺,
%如果当前位置点值为0(背景)该点的四邻域点(上下左右)的和大于3则为毛刺,
%空洞的判断方法为该点为白色(背景)的四周为黑色(前景)八领域点两的和为0,则为空洞。
%去除空洞和毛刺
u=Icc;
for x=2:m-1
for y=2:n-1
if u(x,y)==0
%该点的4邻域点(上下左右) 如果三个或以上都是白点(1)则该点为毛刺
if u(x,y-1)+u(x-1,y)+u(x,y+1)+u(x+1,y)>=3
u(x,y)=1;
end
else
u(x,y)=u(x,y);
end
end
end
figure;imshow(u);
title('去除毛刺');
%去除空洞
for a=2:m-1
for b=2:n-1
if u(a,b)==1
%寻找端点
if abs(u(a,b+1)-u(a-1,b+1))+abs(u(a-1,b+1)-u(a-1,b))+abs(u(a-1,b)-u(a-1,b-1))...
+abs(u(a-1,b-1)-u(a,b-1))+(abs(u(a,b-1)-u(a+1,b-1)))+abs(u(a+1,b-1)-u(a+1,b))...
+abs(u(a+1,b)-u(a+1,b+1))+abs(u(a+1,b+1)-u(a,b+1))~=1
if (u(a,b+1)+u(a-1,b+1)+u(a-1,b))*(u(a,b-1)+u(a+1,b-1)+u(a+1,b))+(u(a-1,b)+u(a-1,b-1)+u(a,b-1))...
*(u(a+1,b)+u(a+1,b+1)+u(a,b+1))==0
%去除空洞
u(a,b)=0;
end
end
end
end
end
figure;imshow(u);
title('去除空洞');
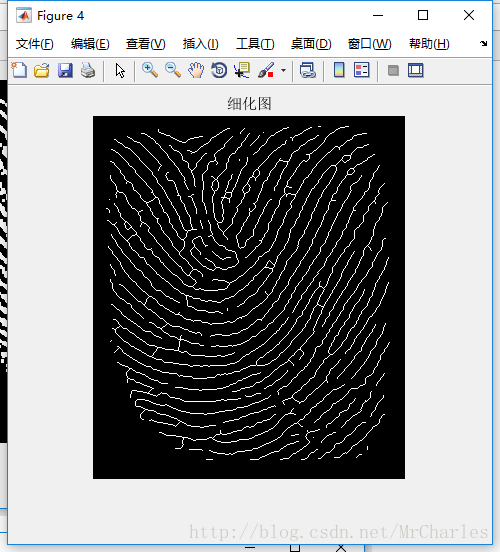
6.图像细化
%图像细化
v=~u;
figure;imshow(v);
se=strel('square',3);%用于膨胀腐蚀及开闭运算等操作的结构元素对象
% 形态学运算中腐蚀,膨胀,开运算和闭运算。
%
% 1. 腐蚀是一种消除边界点,使边界向内部收缩的过程。可以用来消除小且无意义的物体。
% 腐蚀的算法:
% 用3x3的结构元素,扫描图像的每一个像素
% 用结构元素与其覆盖的二值图像做“与”操作
% 如果都为1,结果图像的该像素为1。否则为0。
% 结果:使二值图像减小一圈
%
% 2. 膨胀是将与物体接触的所有背景点合并到该物体中,使边界向外部扩张的过程。可以用来填补物体中的空洞。
% 膨胀的算法:
% 用3x3的结构元素,扫描图像的每一个像素
% 用结构元素与其覆盖的二值图像做“与”操作
% 如果都为0,结果图像的该像素为0。否则为1
% 结果:使二值图像扩大一圈
%
%
% 3. 先腐蚀后膨胀的过程称为开运算。用来消除小物体、在纤细点处分离物体、平滑较大物体的边界的同时并不明显改变其面积。
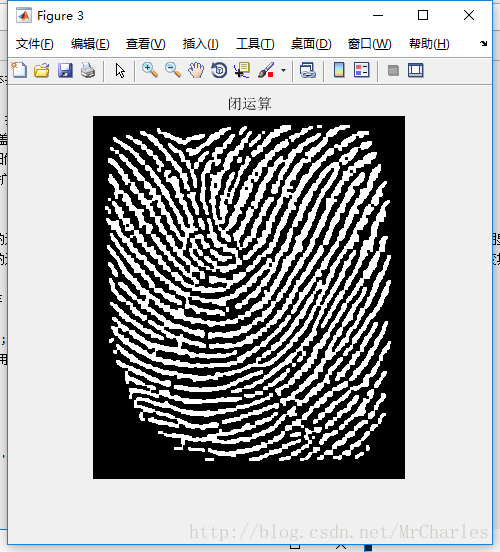
% 4. 先膨胀后腐蚀的过程称为闭运算。用来填充物体内细小空洞、连接邻近物体、平滑其边界的同时并不明显改变其面积。
%
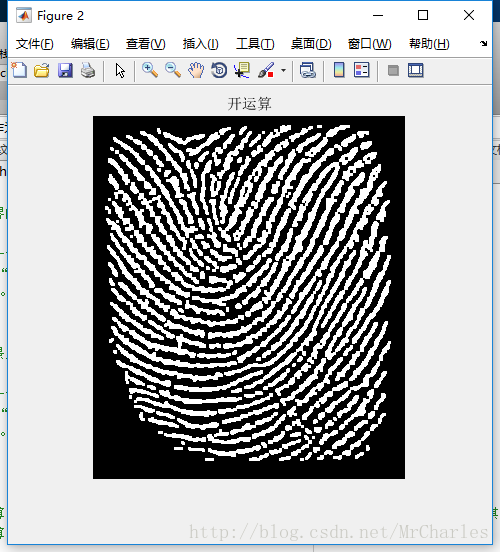
%对图像进行开闭操作
fo=imopen(v,se);
figure;imshow(fo);
% 先腐蚀后膨胀,作用是:可以使边界平滑,消除细小的尖刺,断开窄小的连接,保持面积大小不变
title('开运算')
v=imclose(fo,se);
figure;imshow(v);
title('闭运算')
w=bwmorph(v,'thin',Inf);%对图像进行细化
figure;imshow(w);
title('细化图');
imshow(Icc)