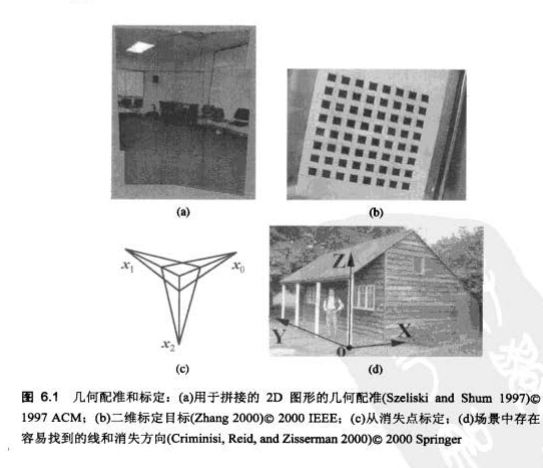
首先引入几何配准和标定的例子:
基于特征的配准是从两个或者多个匹配的 2D 或 3D点的集合中估计运动的问
题。
一、使用最小二乘的 20 配准
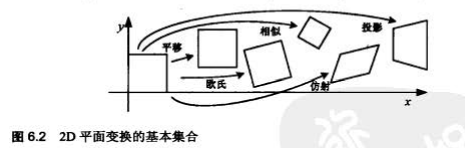
给定匹配的特征点集合({ X_i,x_{i}^{'}})和以下形式的平面参数变换:
为了最好地估计运动参数 ,常用的方法是最小二乘法,也就是最小化残差平方和。
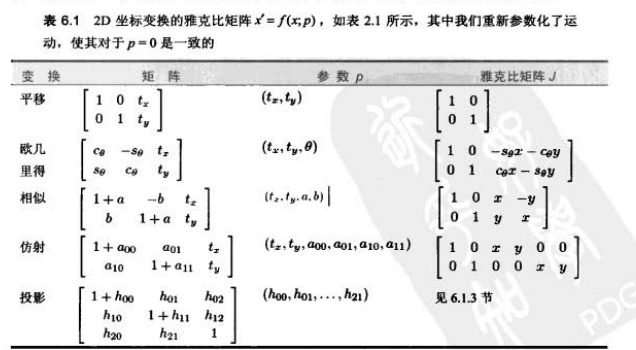
对于不同的变换对应的矩阵和雅可比矩阵总结如下:
二、应用:全景图
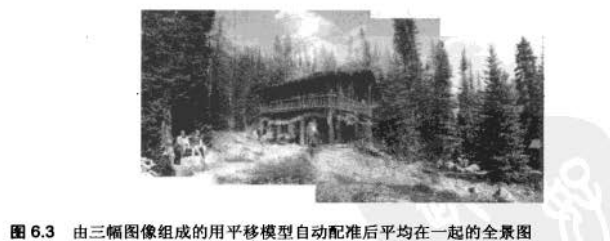
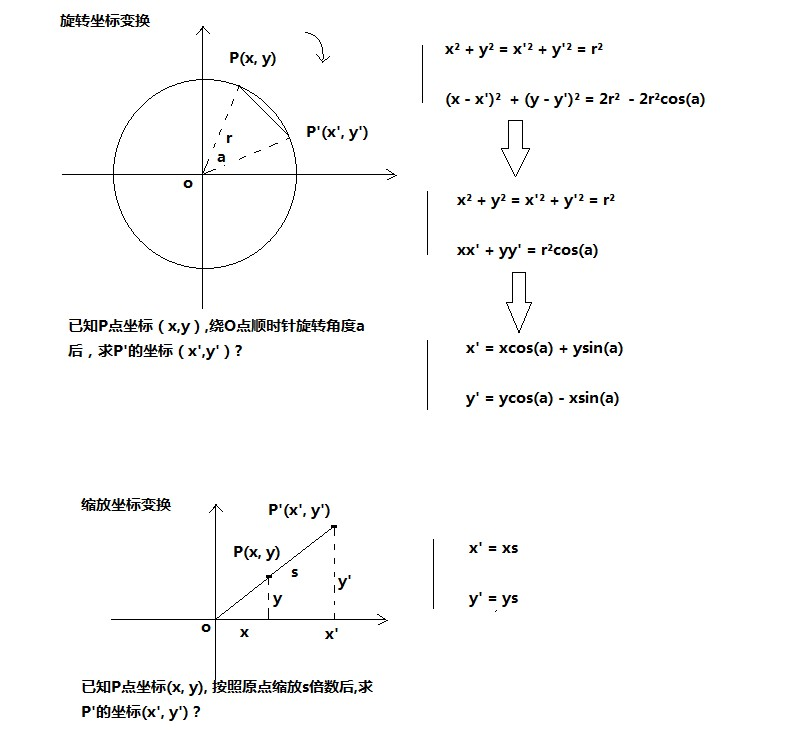
图像配准一个最简单的应用是一种特殊形式的图像拼接,称为“全景图”.在全景图里,在用简单的平均进行融合之前,图像会被平移, 可能还有旋转和缩放。
例如下图:
旋转和缩放变换的公式:
三、迭代算法
线性最小二乘是最简单的参数估计方法,然而在计算机视觉中大多数问题在测
量值和未知值之间不存在简单的线性关系.在这种情况下得到的问题称为“非线性最小二乘”(non-linear least squares)或者“非线性回归’(non-linnear regression).
四、鲁棒最小二乘和 RANSAC
常规的最小二乘对其中噪声符合正态(高斯)分布的量测来说是一个合适的选择。然而在对应点中有外点时,需要更鲁棒的最小二乘.在这种情况下,绿好用*** M-估计**(它对残差施加一个鲁棒惩罚函数 (p(r)) 来代替它们的平方。)
M-估计常常能够减少外点的影响,但是一些情况中,从太多外点起步会
使得 IRLS(或者其他梯度下降算法)不能收敛到全局最优。更好地方法是寻找一个岂不对应的内点集合,也就是与主动运动估计一致的点。主要有两种方法(均为先随机选择 k 个对应点子集,然后计算出事的估计 (p), 再计算对应点全集的残差);
- Random Sample Consensus
- 最小中位方差
五、3D 配准
不同于 2D 图像特征配准,很多计算机视觉应用需要配准3D 点,在 3D变换对运动参数是线性的情况下,eg.平移、相似和仿射变换,可以使用常规的最小二乘法。
对于欧式运动的情况,被称为“绝对方向”问题,需要采用以下两种方法:
- 正交 Procrustes 算法:通过计算 3×3 相关矩阵的 singular value decomposition(SVD)分解,得到旋转矩阵。
- 绝对方向算法:估计对应与旋转矩阵 (R) 的单位四元组,找到具有最大正特征值的特征向量。
有实验将其他两种方法对比,证明以上两种方法的精度差可以忽略不计。