Anibot中包含三种不同的动物形象:小鸡安妮、小鹿安娜、猫头鹰安迪。孩子们通过对各个元器件的学习及编程确保它们幸福成长在阳光氤氲的森林中并完成游戏中相应的挑战。
☞ BOT-X
设计团队 | 何毓嘉 李圆圆 徐雨霏 西恩


我一直被
I am tormented
来自远方的诱惑
with an everlasting itch
折磨着
for things remote.
我是注定要在禁海之上航行的!
I love to sail forbidden seas...
也许还有一点早
Maybe it's a little early.
也许时间还未到来
Maybe the time is not quite yet.
但是那些未知的世界
But those other worlds,
蕴含着无穷机遇,诱惑着我们
promising untold opportunities, beckon.
静静地,它们绕着太阳
Silently, they orbit the Sun...
等待着
⋯⋯waiting..
☞ Emo
设计团队 | 彭璐嘉 凌希 王翌希


Emo(艾莫)机器人的名字来源于emotion,因为不同于其他冷冰冰的机器人,我们更希望赋予这个机器人更类人的情感。Emotion最大化地被表现在Emo的两个大眼睛和小嘴巴上,小朋友们可以通过编程改变舵机的转动角度,以此创造出不同的表情,并在玩耍中掌握与之对应的控制指令。将程序编写和表现效果有趣地结合起来是Emo机器人的最大特点之一。
其次作为编程教具,Emo也可以作为教学板来使用,极大地节省了一套教具的成本;同时,元器件也按照逻辑清晰地排布在内部。Emo的“平转立”开合结构采用了简单稳固的卡扣方式,五分钟即可拼装好整个机器人。
当然,Emo并不止步于编程教具,丰富的拓展模块可以尽情地展现小朋友们的个性、满足各类型的教学拓展需求,构建机器人社区才是我们最终的目标。比如加入的“踢足球”模块就可以让小朋友们尝试编写踢足球相关的程序,并和其他的机器人产生有趣的交互。
☞ gogg 阿嗝
设计团队 | 黄亦杨 申由甲 张毅沁

阿嗝是一个让孩子开心,让老师顺心的编程教学机器人。我们优化了原本的教学模式,加入更多的机器人拼装教学,使其穿插在各个学习阶段,并针对这种改进在内部结构上进行了优化。阿嗝采用复古的造型语言,结合一些撞色的色彩搭配,作为亮点的开合结构与机械手的可动性丰富了整个拼装过程,让学生真正体会到机器人的浪漫。
☞ Kid A
设计团队 | 蔡旦鹏 倪索

Kid A是一个高冷的coding robot,他的概念是想在教具的基础上与小朋友们建立一种更特殊的情感联系。我们将排线优化整合全部外露,直观的同时具有蒸汽朋克的美感,同时也比较好的拿捏了通识教育所需要的难度跨度,既清晰简明又兼具拓展性。
☞ MENDES
设计团队 | 胡凯 郝思琦 王婉乔

我们团队以“重拾美妙童年”为核心概念,选取“可爱+外形+亲密”的外形策略和“翻转课堂+同龄人合作+个性化表达”的教学策略,通过八周的课程的迭代推进,设计完成我们的MENDES编程教学机器人。
在外形方面,大大的触角、鲜亮的橙色与充满未来感的小盔甲能让小朋友们与MENDES初次见面时就能产生无穷的化学反应。结合3D打印课程设计的偏心轮,能让MENDES做出抖动、弹跳、摇摆等各式各样活泼的运动方式,使整个教学过程充满童趣不枯燥。在说明书与机器人安装方面,安装的步骤被完全故事化,整个拼装过程将以五本“飞船修复指南”的方式呈现给学生们,让他们可以在愉悦的沟通协助中完成拼装。机器人也预先设置好了拼装中需要合作的关键步骤,这也能改变现在有独立安装机器人经验的学生会主导机器人安装的状况,让每个孩子都能平等地参与到这段独特的体验之中。
☞ Modular G
设计团队 | 戴思源 蔡雨薇 初正岳

Module
G,由module和G组成,Module代表模块,G代表我们希望通过这套产品设计给孩子们带来的游戏感(Game),探索心(Geek),开发天分(Genius),做的更好(Great),成为他们的向导(Guide)的愿望。我们采用标准化设计的功能模块,集成化设计的供电与编程基地,以及炫酷百搭的框架造型,使不同功能模块之间的搭配协同工作、新传感器模块的导入成为可能。模块主体嵌入框架,在基地上进行接线,再将基地通过转轴旋转装入框架背部,Module
G的装配过程十分的简单明了。各个模块还可单独嵌入模块框,形成一个个形态各异的可爱形象,使学习过程更加有趣生动。
☞ pillx
设计团队 | 孙哲 张丹琳 梁策

pillx机器人整体造型好像一颗小胶囊,但是在胶囊这一基础形态上我们增加了“五官”、“耳朵”和“尾巴”这些拟人化的部分,其中耳朵和尾巴两部分是可以自定义的部分,配合3d打印课程,由此我们的机器人多了x种可能性。这款机器人小巧、可爱,同时它的内部支架更是一大亮点,支架由四片单体组成,通过彼此厚度相互制约,形成了倒“T”字形,极大地节约了空间,同时这部分的支架还可以作为教学板进行使用。除此以外,我们这款机器人还融入了传统的机器结构,通过旋转尾巴带动齿轮击打金属片,从而发出机械的美妙音乐,和喇叭唱出的歌曲交相呼应,试图带给同学更多的趣味体验。
☞ Trans M
设计团队 | 吴凡 张梦恬 江酉玥

TRANS
M= TRANS + METTIS 意味着可变形的编程机器人。通过四块安装板和头部尾部的组合,TRANS
M可以变化成汽车形和人形。同时TRANS
M的身体被设计成平面转立体的结构,大大缩小了机器人的体积,外观上更为迷你。另外为了提升用户体验,TRANS
M省去了拧螺丝、绕线等繁琐步骤,通过卡口卡元件,小朋友可以实现快速拼装。
☞ 齿轮宝贝
设计团队 | 王晶 雷友玲 宋伊琳

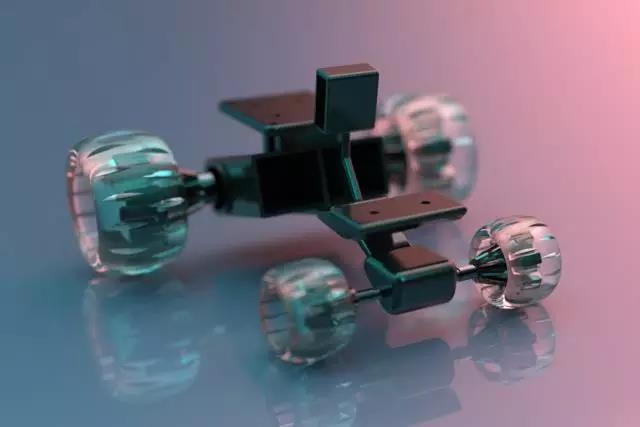
机器人gear-obot是一款以“机械运动”为设计理念的机器人产品。这款机器人以电子元件——舵机和电机,作为基础进行考量,从而设计出以齿轮传动,杠杆带动的机械方式,以达到主体的二轮被一轮杠杆带动,沿一轮外沿做齿轮运动,同时二轮杠杆带动三轮从动向前,达到机器人全身的,模仿蚯蚓“拱动前行”的趣味运动。而在不同电子编程数据的作用下,这一“拱动”效果的起伏大小、速度,都能有不一而足的改变和趣味性效果。
在设计伊始,我们就敏锐的的发现到机器人机械部分的重要设计潜力。这一部分充满了物理原理的趣味性,从而得到了机器人不单单从外观形态,而是转变为运动方式的“仿生”的想法,最终实现了在电子编程作用下的,“简单机械运动”向“复杂有趣运动”的进化。
指导老师|刘震元、谭靖漪、刘胧、樊中
☞感谢赞助方上海曼帝思创新科技有限公司对本次课程的大力支持

供稿 | 大三工设班
编辑 | 孙哲、榴莲、睿妍
责编 | 徐徐