PointNet++是在PointNet上做出了改进,考虑了点云局部特征提取,从而更好地进行点云分类和分割。
先简要说一下PointNet:
PointNet,其本质就是一种网络结构,按一定的规则输入点云数据,经过一层层地计算,得出分类结果或者分割结果。其中比较特殊的地方在于两个转换矩阵(input transform & feature transform)的存在,根据文中所说,这两个转换矩阵可以在深度学习过程中保持点云数据的空间不变性。
根据论文里所说,图中的input transform是一个3*3的矩阵,作为深度学习的一个参数存在。而feature transform由于维数较大(64*64),所以文中采用了正交约束的方法限制这个矩阵,从而使优化可以快速收敛。
PointNet:PointNet Deep Learning on Point Sets for 3D Classification and Segmentation .
简介:PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation-论文解读

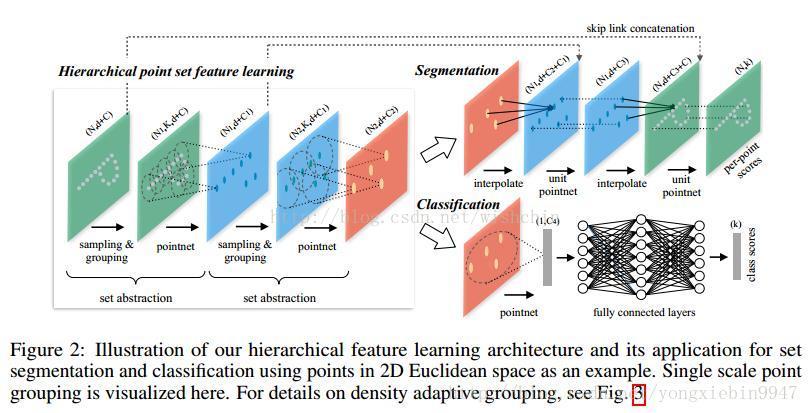
PointNet++:PointNet++: Deep Hierarchical Feature Learning onPoint Sets in a Metric Space
简介:PointNet++阅读笔记
注意事项:
输入数据的标准化工作,输入一个梯级表示模型。
从一点开始(可以是密度最高点,也可以随机选取),作为已选集合,使用测地线判断离已选集合最远点,然后更新已选集合,再次添加新的集合最远点,这样不管获得多少个点,都意味着模型的稀疏点表示。随着点集的增加,模型的表示越来越精确。
刘洪森同学对此网络进行了改进,暂时还没有仔细Get他的进展。