目前,大多数智能车辆都装备有快速三维(3D)LiDAR扫描仪,例如由Velodyne制造的扫描仪。激光能够直接提供物体的几何信息,具有范围广、成像距离远和不受光线影响的优点,因此成为近几年的研究热点。然而其无法提供物体的纹理信息,过于稀疏无法提取特征点,往往需要与相机进行配合来达到应用功能。
激光相机数据融合的首要任务在于如何将激光获取的点(X,Y, Z)投影于图像上获取其颜色值(R,G,B),从而形成彩色点云(X,Y,Z,R,G,B)。其次才能用于解决一些例如物体检测、物体追踪、和场景寓意识别等内容。本博客将从最基本的问题出发解决一些研究内容。
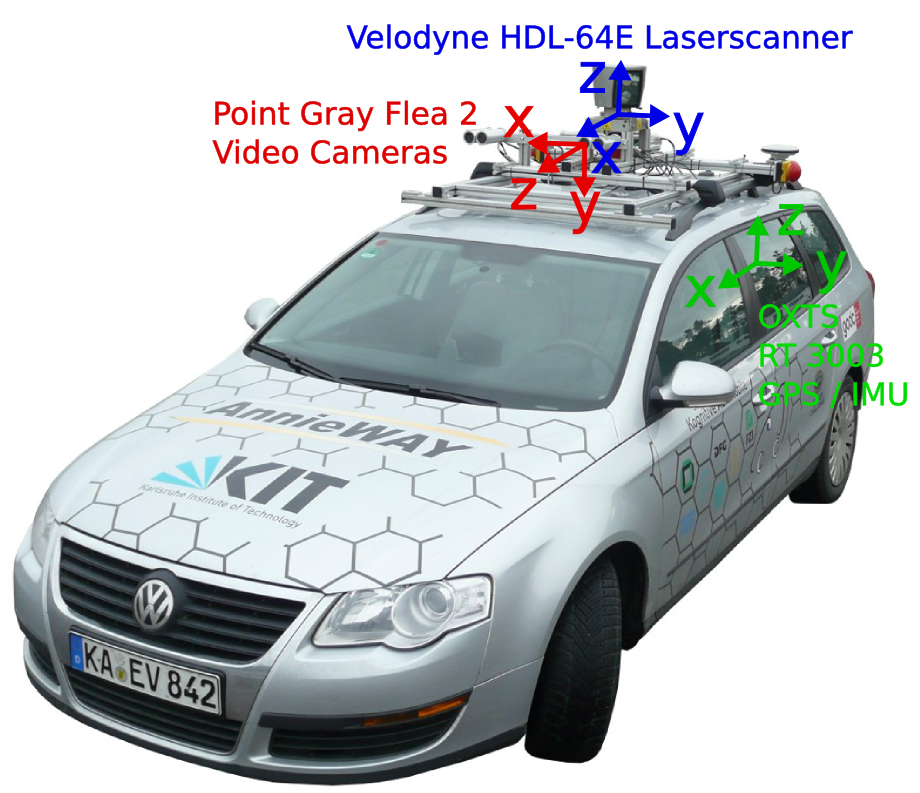
激光相机数据融合最常用的数据库为KITTI(http://www.cvlibs.net/datasets/kitti/setup.php),百分之九十以上的激光或者无人车的算法测试都会引用它。其无人车携带了两个摄像头、一个64线激光和GPS/imu。数据集提供了大量图片、激光数据和车辆位置信息供算法测试。
接下的的内容也将介绍我们自己搭载的机器人和仿真软件。
编程主要通过MATLAB、ROS、PCL、OPENCV来实现,操作系统为ubuntu14.14.