矩阵乘法是个很高端的东西。
注意事项: 以下的讲述下标都从0开始
矩阵是什么?
不解释
矩阵加减法?
矩阵加矩阵,就将对应的加上。
矩阵加常数,就将每一个元素都加上这个常数。
减法同理。
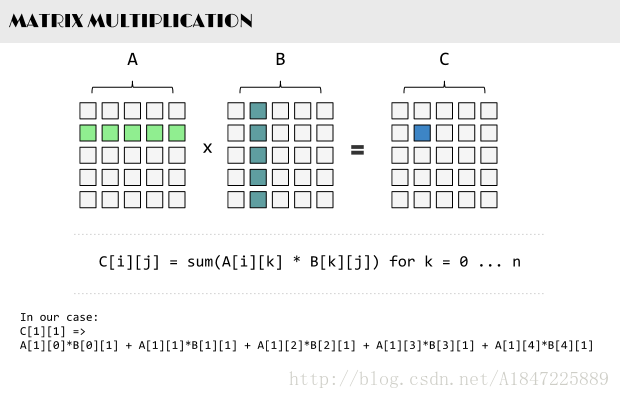
矩阵乘法
一张好图,在这里发现的,方便理解矩阵乘法。
一个
可以简单地理解为,A中i行的元素,与B中j列的元素,对应相乘得到的和。
矩阵乘法的运算定律
(1) 不满足交换律
(2) 满足结合律:(AB)C=A(BC)
(3) 满足分配律:(A+B)C=AC+BC A(B+C)=AB+AC
模板
template <typename T,int M,int N>
struct Matrix
{
T mat[M][N];
inline Matrix(){memset(mat,0,sizeof mat);}
inline T* operator[](int i){return mat[i];}
};
template <typename T,int M,int N,int P>
inline Matrix<T,M,P> operator*(const Matrix<T,M,N>& x,const Matrix<T,N,P>& y)
{
Matrix<T,M,P> ret;
int i,j,k;
for (i=0;i<M;++i)
for (j=0;j<P;++j)
for (k=0;k<N;++k)
ret.mat[i][j]+=x.mat[i][k]*y.mat[k][j];
return ret;
}
template <typename T,typename T_>
inline T pow(T x,T_ y)
{
T ret=x;
--y;//这两句话可以忽略初值问题,但y<=0时就悲剧了
while (y)
{
if (y&1)
ret=ret*x;
y>>=1;
x=x*x;
}
return ret;
}矩阵乘法的应用
矩阵乘法可以优化时间。
将某些操作转化为矩阵乘法的形式,就可以用快速幂减少时间。因为矩阵乘法满足结合律。
例题一 斐波那契数列
描述
题目背景
大家都知道,斐波那契数列是满足如下性质的一个数列:
• f(1) = 1
• f(2) = 1
• f(n) = f(n-1) + f(n-2) (n ≥ 2 且 n 为整数)题目描述
请你求出 f(n) mod 1000000007 的值。
输入格式:
·第 1 行:一个整数 n
输出格式:
第 1 行: f(n) mod 1000000007 的值
输入样例#1:
5
输出样例#1:
5
输入样例#2:
10
输出样例#2:
55
说明
对于 60% 的数据: n ≤ 92
对于 100% 的数据: n在long long(INT64)范围内。
解法
这是一道裸斐波拉契数列。传统递推是O(N)的,显然会炸。
斐波拉契数列有个通项,但我们在这里用矩阵乘法解决。
我们知道f(n)是由f(n-1)和f(n-2)推过来的,不妨设一个1*2的矩阵
现在我们要通过A推出B
我们要求出一个2*2的 转移矩阵 T,满足
即
我们知道,B[0][0]=A[0][1] B[0][1]=A[0][0]+A[0][1]
对于T[0][0],A[0][0]对B[0][0]没有贡献,所以T[0][0]=0
对于T[1][0],A[0][1]对B[0][0]有贡献,B[0][0]=A[0][1]*1,所以T[1][0]=1
对于T[0][1],A[0][0]对B[0][1]有贡献,B[0][1]=A[0][0]*1+A[0][1]*1,所以T[0][1]=1
对于T[1][1],A[1][1]对B[0][1]有贡献,B[1][1]=A[0][0]*1+A[0][1]*1,所以T[1][1]=1
综上所述,
显然这个式子是正确的。
求出这个矩阵后,就可以愉快地快速幂了。
时间复杂度O(lgN)
代码
#include <cstdio>
#include <cstring>
#include <algorithm>
using namespace std;
#define mod 1000000007
template <typename T,int M,int N>
struct Matrix
{
T mat[M][N];
inline Matrix(){memset(mat,0,sizeof mat);}
inline T* operator[](int i){return mat[i];}
};
template <typename T,int M,int N,int P>
inline Matrix<T,M,P> operator*(const Matrix<T,M,N>& x,const Matrix<T,N,P>& y)
{
Matrix<T,M,P> ret;
int i,j,k;
for (i=0;i<M;++i)
for (j=0;j<P;++j)
for (k=0;k<N;++k)
(ret.mat[i][j]+=x.mat[i][k]*y.mat[k][j])%=mod;
return ret;
}
template <typename T,typename T_>
inline T pow(T x,T_ y)
{
T ret=x;
--y;
while (y)
{
if (y&1)
ret=ret*x;
y>>=1;
x=x*x;
}
return ret;
}
int main()
{
long long n;
scanf("%lld",&n);
if (n==1)
putchar('1');
else
{
Matrix<long long,2,2> tmp;
tmp[0][1]=tmp[1][0]=tmp[1][1]=1;
tmp=pow(tmp,n-1);
Matrix<long long,1,2> a;
a[0][1]=1;//a=[f(0) f(1)]
a=a*tmp;//[f(0) f(1)]*(T^(n-1))=[f(n-1) f(n)]
printf("%lld
",a[0][1]);
}
}例题二 【NOIP2013模拟联考14】图形变换
Description
翔翔最近接到一个任务,要把一个图形做大量的变换操作,翔翔实在是操作得手软,决定写个程序来执行变换操作。
翔翔目前接到的任务是,对一个由n个点组成的图形连续作平移、缩放、旋转变换。相关操作定义如下:
Trans(dx,dy) 表示平移图形,即把图形上所有的点的横纵坐标分别加上dx和dy;
Scale(sx,sy) 表示缩放图形,即把图形上所有点的横纵坐标分别乘以sx和sy;
Rotate(θ,x0,y0) 表示旋转图形,即把图形上所有点的坐标绕(x0,y0)顺时针旋转θ角度
由于某些操作会重复运行多次,翔翔还定义了循环指令:
Loop(m)
…
End
表示把Loop和对应End之间的操作循环执行m次,循环可以嵌套。Input
第一行一个整数n(n<=100)表示图形由n个点组成;
接下来n行,每行空格隔开两个实数xi,yi表示点的坐标;
接下来一直到文件结束,每行一条操作指令。保证指令格式合法,无多余空格。Output
输出有n行,每行两个空格隔开实数xi,yi表示对应输入的点变换后的坐标。
本题采用Special Judge判断,只要你输出的数值与标准答案误差不能超过1即可。Sample Input
3
0.5 0
2.5 2
-4.5 1
Trans(1.5,-1)
Loop(2)
Trans(1,1)
Loop(2)
Rotate(90,0,0)
End
Scale(2,3)
EndSample Output
10.0000 -3.0000
18.0000 15.0000
-10.0000 6.0000Data Constraint
保证操作中坐标值不会超过double范围,输出不会超过int范围;
指令总共不超过1000行;
对于所有的数据,所有循环指令中m<=1000000;
对于60%的数据,所有循环指令中m<=1000;
对于30%的数据不含嵌套循环。Hint
【友情提醒】
pi的值最好用系统的值。C++的定义为:#define Pi M_PI
Pascal就是直接为:pi
不要自己定义避免因为pi带来的误差。
解法
旋转公式:
暴力铁定超时。
先考虑使用2*2的转移矩阵T,但是只能对付乘法,加法和旋转就要用矩阵加法了。矩阵乘法和矩阵加法混在一起很麻烦(矩阵套矩阵?)。
我们可以新增一个常数项
现在要求出T1、T2、T3满足
这样加、乘就特别容易,将旋转公式用乘法分配律拆开,也可以得出转移矩阵
可以代进去看看,是成立的。
于是我们可以将所有操作乘起来(有循环时递归,算出这个循环里一次的乘积后快速幂),最后在将每个坐标乘这个积,就是答案。
代码
英语不好,将theta打成xida,懒得改,注意一下就好了。
#include <cstdio>
#include <cstring>
#include <cmath>
#include <cassert>
#include <algorithm>
using namespace std;
#define I_O(x) freopen(""#x".in","r",stdin);freopen(""#x".out","w",stdout)
#define Pi 3.14159265358979323846
template <typename T,int M,int N>
struct Matrix
{
T mat[M][N];
inline Matrix(){memset(mat,0,sizeof mat);}
inline T* operator[](int i){return mat[i];}
};
template <typename T,int M,int N,int P>
inline Matrix<T,M,P> operator*(const Matrix<T,M,N>& x,const Matrix<T,N,P>& y)
{
Matrix<T,M,P> ret;
int i,j,k;
for (i=0;i<M;++i)
for (j=0;j<P;++j)
for (k=0;k<N;++k)
ret.mat[i][j]+=x.mat[i][k]*y.mat[k][j];
return ret;
}
template <typename T,typename T_>
inline T pow(T x,T_ y)
{
T ret=x;
--y;
while (y)
{
if (y&1)
ret=ret*x;
y>>=1;
x=x*x;
}
return ret;
}
int n;
Matrix<double,1,3> d[100];
char cz[101];
Matrix<double,3,3> dfs(int);
int main()
{
I_O(transform);
scanf("%d",&n);
int i;
double x,y;
for (i=0;i<n;++i)
{
scanf("%lf%lf",&d[i][0][0],&d[i][0][1]);
d[i][0][2]=1;
}
Matrix<double,3,3> a,tmp1,tmp2,tmp3;//分三个变量是为避免多次赋值
a[0][0]=a[1][1]=a[2][2]=1;//a的初值
tmp1[0][0]=tmp1[1][1]=tmp1[2][2]=1;
tmp2[2][2]=1;
tmp3[2][2]=1;
double xida,tmp_sin,tmp_cos;
int t;
while (scanf("%s",cz)==1)
{
switch (*cz)
{
case 'T':
// 1 0 0
// 0 1 0
// a b 1
sscanf(cz,"Trans(%lf,%lf",&tmp1[2][0],&tmp1[2][1]);
a=a*tmp1;
break;
case 'S':
// a 0 0
// 0 b 0
// 0 0 1
sscanf(cz,"Scale(%lf,%lf",&tmp2[0][0],&tmp2[1][1]);
a=a*tmp2;
break;
case 'R':
sscanf(cz,"Rotate(%lf,%lf,%lf",&xida,&x,&y);
xida=-xida/180*Pi;//顺时针角度转成逆时针弧度
// cos sin 0
// -sin cos 0
// a-a*cos+b*sin b-a*sin-b*cos 1
tmp_sin=sin(xida);
tmp_cos=cos(xida);
tmp3[0][0]=tmp_cos; tmp3[0][1]=tmp_sin; tmp3[0][2]=0;
tmp3[1][0]=-tmp_sin; tmp3[1][1]=tmp_cos; tmp3[1][2]=0;
tmp3[2][0]=x-x*tmp_cos+y*tmp_sin; tmp3[2][1]=y-x*tmp_sin-y*tmp_cos;
a=a*tmp3;
break;
default:
sscanf(cz,"Loop(%d",&t);
a=a*dfs(t);
}
}
Matrix<double,1,3> tmp;
for (i=0;i<n;++i)
{
tmp=d[i]*a;
printf("%.4lf %.4lf
",tmp[0][0],tmp[0][1]);
}
}
Matrix<double,3,3> dfs(int t)
{
double x,y;
Matrix<double,3,3> a,tmp1,tmp2,tmp3;
a[0][0]=a[1][1]=a[2][2]=1;
tmp1[0][0]=tmp1[1][1]=tmp1[2][2]=1;
tmp2[2][2]=1;
tmp3[2][2]=1;
int times;
double xida,tmp_sin,tmp_cos;
for (scanf("%s",cz);*cz!='E';scanf("%s",cz))
{
switch (*cz)
{
case 'T':
sscanf(cz,"Trans(%lf,%lf",&tmp1[2][0],&tmp1[2][1]);
// 1 0 0
// 0 1 0
// a b 1
a=a*tmp1;
break;
case 'S':
sscanf(cz,"Scale(%lf,%lf",&tmp2[0][0],&tmp2[1][1]);
// a 0 0
// 0 b 0
// 0 0 1
a=a*tmp2;
break;
case 'R':
sscanf(cz,"Rotate(%lf,%lf,%lf",&xida,&x,&y);
xida=-xida/180*Pi;
// cos sin 0
// -sin cos 0
// a-a*cos+b*sin b-a*sin-b*cos 1
tmp_sin=sin(xida);
tmp_cos=cos(xida);
tmp3[0][0]=tmp_cos; tmp3[0][1]=tmp_sin; tmp3[0][2]=0;
tmp3[1][0]=-tmp_sin; tmp3[1][1]=tmp_cos; tmp3[1][2]=0;
tmp3[2][0]=x-x*tmp_cos+y*tmp_sin; tmp3[2][1]=y-x*tmp_sin-y*tmp_cos;
a=a*tmp3;
break;
default:
sscanf(cz,"Loop(%d",×);
a=a*dfs(times);
}
}
return pow(a,t);
}例题三 【SDOI2009】HH去散步
描述
题目描述
HH有个一成不变的习惯,喜欢饭后百步走。所谓百步走,就是散步,就是在一定的时间 内,走过一定的距离。 但是同时HH又是个喜欢变化的人,所以他不会立刻沿着刚刚走来的路走回。 又因为HH是个喜欢变化的人,所以他每天走过的路径都不完全一样,他想知道他究竟有多 少种散步的方法。
现在给你学校的地图(假设每条路的长度都是一样的都是1),问长度为t,从给定地 点A走到给定地点B共有多少条符合条件的路径输入格式:
第一行:五个整数N,M,t,A,B。其中N表示学校里的路口的个数,M表示学校里的 路的条数,t表示HH想要散步的距离,A表示散步的出发点,而B则表示散步的终点。
接下来M行,每行一组Ai,Bi,表示从路口Ai到路口Bi有一条路。数据保证Ai != Bi,但 不保证任意两个路口之间至多只有一条路相连接。 路口编号从0到N − 1。 同一行内所有数据均由一个空格隔开,行首行尾没有多余空格。没有多余空行。 答案模45989。输出格式:
一行,表示答案。
输入样例#1:
4 5 3 0 0
0 1
0 2
0 3
2 1
3 2输出样例#1:
4
说明
对于30%的数据,N ≤ 4,M ≤ 10,t ≤ 10。
对于100%的数据,N ≤ 50,M ≤ 60,t ≤ 2^30,0 ≤ A,B
解法
先说一下大意(我等好久才弄懂)。
给你一张图,要从A走到B,不能走上一次走的路,要走t步,问方案数。
不能走上一次走的路,一次。
举个例子:
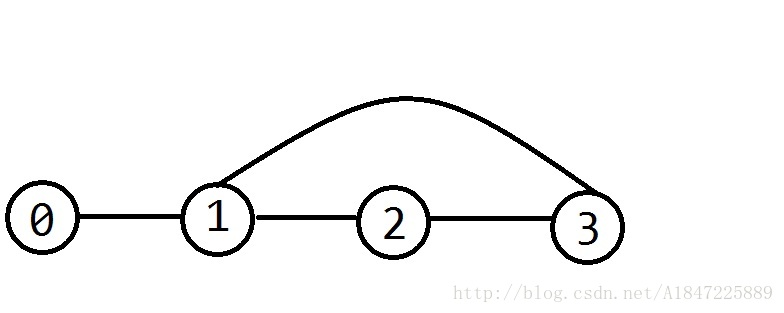
路径可以这样:0->1->2->3->1->0
所以我们可以想到DP
设f[i][j]表示第i步走了j这条边的方案数,这样在转移时,就可以方便地判断,避免走上一次走的路。
转移:
但是,我们发现,每次的决策点都是一样的,很明显能直接用矩阵乘法来转移,快速幂即可。
代码
#include <cstdio>
#include <cstring>
#include <cstdlib>
#include <algorithm>
using namespace std;
template <typename T,int M,int N>
struct Matrix
{
T mat[M][N];
inline Matrix(){memset(mat,0,sizeof mat);}
inline T* operator[](int i){return mat[i];}
};
template <typename T,int M,int N,int P>
inline Matrix<T,M,P> operator*(const Matrix<T,M,N>& x,const Matrix<T,N,P>& y)
{
Matrix<T,M,P> ret;
int i,j,k;
for (i=0;i<M;++i)
for (j=0;j<P;++j)
for (k=0;k<N;++k)
ret.mat[i][j]+=x.mat[i][k]*y.mat[k][j];
for (i=0;i<M;++i)
for (j=0;j<P;++j)
ret.mat[i][j]%=45989;//减少mod运算(mod运算很慢的)
return ret;
}
template <typename T,typename T_>
inline T pow(T x,T_ y)
{
T ret=x;
--y;
while (y)
{
if (y&1)
ret=ret*x;
y>>=1;
x=x*x;
}
return ret;
}
int n,m,t,u,v;
struct EDGE
{
int from,to;
EDGE* las;
EDGE* rev;
} e[120];
EDGE* last[20];
Matrix<long long,1,120> f;
Matrix<long long,120,120> T;
int li[60];//用于记录连接终点的边
int nl;
int main()
{
scanf("%d%d%d%d%d",&n,&m,&t,&u,&v);
int i,j=-1,x,y;
for (i=1;i<=m;++i)
{
scanf("%d%d",&x,&y);
++j;
e[j]={x,y,last[x],e+j+1};
last[x]=e+j;
if (y==v)
li[nl++]=j;
++j;
e[j]={y,x,last[y],e+j-1};
last[y]=e+j;
if (x==v)
li[nl++]=j;
}
EDGE* ei;
for (ei=last[u];ei;ei=ei->las)
f[0][int(ei-e)]=1;
m<<=1;
EDGE *ej,*end=e+m;
for (ei=e;ei<end;++ei)
for (ej=last[ei->to];ej;ej=ej->las)
if (ei->rev!=ej)
T[int(ei-e)][int(ej-e)]=1;//生成转移矩阵
f=f*pow(T,t-1);
int ans=0;
for (i=0;i<nl;++i)
ans+=f[0][li[i]];
printf("%d
",ans%45989);
}总结
- 遇到矩阵乘法的题,先将转移后的式子拆开,再帮它配转移矩阵。
- 如果用普通的方式配矩阵必须出现加法,那么可以尝试加常数项上去。
- 若有某些DP(还是递推?)的题目的决策点固定,那么可以在程序中生成转移矩阵,直接快速幂。
补充
矩阵乘法模板2.0
template <typename T,int M,int N>
struct Matrix
{
int m,n;
T mat[M][N];
inline Matrix(){m=M;n=N;memset(mat,0,sizeof mat);}
inline void SetUpSize(int _m,int _n){m=_m;n=_n;}
inline T* operator[](int i){return mat[i];}
};
template <typename T,int M,int N,int P>
inline Matrix<T,M,P> operator*(const Matrix<T,M,N>& x,const Matrix<T,N,P>& y)
{
Matrix<T,M,P> ret;
int i,j,k;
for (i=0;i<x.m;++i)
for (j=0;j<y.n;++j)
for (k=0;k<x.n;++k)
ret.mat[i][j]+=x.mat[i][k]*y.mat[k][j];
return ret;
}
template <typename T,typename T_>
inline T pow(T x,T_ y)
{
T ret=x;
--y;//这两句话可以忽略初值问题,但y<=0时就悲剧了
while (y)
{
if (y&1)
ret=ret*x;
y>>=1;
x=x*x;
}
return ret;
}